目標(biāo)的有效途徑。ZR機(jī)械手廠家將為您深入解析ZR機(jī)械手如何助力企業(yè)提高生產(chǎn)效率、降低成本。 1、ZR機(jī)械手作為一種自動(dòng)化設(shè)備,能夠大幅提高生產(chǎn)效率。在傳統(tǒng)的生產(chǎn)線中,人工操作占據(jù)了大部分的生產(chǎn)時(shí)間。而ZR機(jī)械手通過(guò)程序控制,可以實(shí)現(xiàn)24小
2024-02-28 15:14:47 102
102 
ZR機(jī)械手:推動(dòng)制造業(yè)向更高水平發(fā)展-速程精密 隨著科技的不斷發(fā)展,制造業(yè)正面臨著巨大的變革。在這個(gè)過(guò)程中,ZR機(jī)械手以其卓越的性能和創(chuàng)新的技術(shù),成為了推動(dòng)制造業(yè)向更高水平發(fā)展的重要力量。 ZR
2024-02-28 15:06:08112 
夾爪的應(yīng)用是機(jī)器人、機(jī)械手臂末端執(zhí)行器,其穩(wěn)定、高效、精準(zhǔn)、科技化的特點(diǎn),有效提高了各行各業(yè)生產(chǎn)效率,解決工業(yè)化精密運(yùn)動(dòng)控制的難題。電動(dòng)夾爪通過(guò)電機(jī)、傳動(dòng)系統(tǒng)、減速器及夾爪控制系統(tǒng)組成,兩端
2024-02-23 08:09:4778 
夾爪的應(yīng)用是機(jī)器人、機(jī)械手臂末端執(zhí)行器,其穩(wěn)定、高效、精準(zhǔn)、科技化的特點(diǎn),有效提高了各行各業(yè)生產(chǎn)效率,解決工業(yè)化精密運(yùn)動(dòng)控制的難題。
2024-02-22 11:22:30164 
搬運(yùn)機(jī)械手是工廠、流水線上非常重要的角色,用于完成對(duì)貨品或工件的取放動(dòng)作。搬運(yùn)機(jī)械手能否做到流暢的工作,穩(wěn)定且更有保障的持續(xù)安全供電連接是非常關(guān)鍵的一環(huán)。YM系列連接器為搬運(yùn)機(jī)械手提供連接支持搬運(yùn)
2024-02-19 14:03:4581 
調(diào)用同一套API函數(shù)庫(kù),易與現(xiàn)有的工業(yè)控制系統(tǒng)集成,極大地提高了工程師進(jìn)行二次開(kāi)發(fā)的效率,加速設(shè)備的部署和應(yīng)用。PCIE464產(chǎn)品硬件性能特點(diǎn)
(1)可選6-64軸運(yùn)動(dòng)控制,支持EtherCAT總線/脈沖
2024-01-24 09:48:21
、電氣和控制于一體的先進(jìn)自動(dòng)化設(shè)備。該設(shè)備主要包括機(jī)械臂、感知系統(tǒng)、上下料平臺(tái)和控制系統(tǒng)等組成。其工作流程如下:感知系統(tǒng)實(shí)時(shí)監(jiān)測(cè)工作環(huán)境,獲取五金板材的位置、形狀等
2024-01-23 11:10:43122 
ZR機(jī)械手:創(chuàng)新引領(lǐng),助力工業(yè)自動(dòng)化升級(jí) 隨著科技的飛速發(fā)展,工業(yè)自動(dòng)化已成為制造業(yè)轉(zhuǎn)型升級(jí)的關(guān)鍵。在這個(gè)過(guò)程中,ZR機(jī)械手以其卓越的性能和創(chuàng)新的技術(shù),成為了助力工業(yè)自動(dòng)化升級(jí)的重要力量。 一、創(chuàng)新
2024-01-19 10:54:14141 很多人希望多分享一些PLC具體應(yīng)用和維護(hù)的案例,滿足大家的要求。今天咱們來(lái)談一談如何利用PLC來(lái)實(shí)現(xiàn)簡(jiǎn)單的搬運(yùn)動(dòng)作,讓機(jī)械為人服務(wù)!
2024-01-18 13:52:24399 
,智能控制系統(tǒng)已廣泛應(yīng)用于工業(yè)自動(dòng)化、交通運(yùn)輸、能源管理、環(huán)境監(jiān)測(cè)等領(lǐng)域。下面介紹智能控制系統(tǒng)的主要類型。 模糊控制系統(tǒng) 模糊控制系統(tǒng)是一種基于模糊邏輯的控制系統(tǒng),可以根據(jù)模糊規(guī)則來(lái)進(jìn)行決策和控制。模糊控制系統(tǒng)
2024-01-17 11:05:32497 ZR機(jī)械手:技術(shù)升級(jí),推動(dòng)產(chǎn)業(yè)變革 隨著科技的飛速發(fā)展,自動(dòng)化設(shè)備在各個(gè)產(chǎn)業(yè)領(lǐng)域中的應(yīng)用越來(lái)越廣泛。作為自動(dòng)化設(shè)備的重要組成部分,機(jī)械手在提高生產(chǎn)效率、保證產(chǎn)品質(zhì)量、降低勞動(dòng)成本等方面發(fā)揮
2024-01-11 09:21:59143 農(nóng)業(yè)機(jī)械對(duì)于控制、智能的需求一點(diǎn)都沒(méi)有比工業(yè)低。在走向智能化的道路上,農(nóng)業(yè)機(jī)械需要高性能的控制系統(tǒng)支撐。
2024-01-10 10:30:01331 。 一、集成化設(shè)計(jì),簡(jiǎn)化生產(chǎn)流程 ZR機(jī)械手采用集成化設(shè)計(jì),將Z軸、R軸、氣路、真空產(chǎn)生與監(jiān)控、壓力閉環(huán)控制與檢測(cè)以及氣動(dòng)夾持等功能集成在一起。這種設(shè)計(jì)不僅簡(jiǎn)化了設(shè)備結(jié)構(gòu),提高了設(shè)備的可靠性和穩(wěn)定性,而且使得生產(chǎn)流程更加簡(jiǎn)
2024-01-03 16:20:59140 、主軸的基本定義與功能主軸是機(jī)械設(shè)備中的一個(gè)關(guān)鍵組件,通常指的是支撐或連接旋轉(zhuǎn)部件的軸。它在機(jī)械系統(tǒng)中的作用是多方面的,最主要的是傳遞扭矩和旋轉(zhuǎn)運(yùn)動(dòng)。無(wú)論是在機(jī)床、汽車引擎還是其他旋轉(zhuǎn)設(shè)備中,主軸都
2024-01-03 10:10:11
? ? ?隨著科技的不斷發(fā)展,許多傳統(tǒng)行業(yè)正在逐漸引入自動(dòng)化技術(shù),以提高生產(chǎn)效率和降低成本。面粉廠也不例外,其中碼垛機(jī)械手作為一種自動(dòng)化設(shè)備,已經(jīng)逐漸成為面粉廠中不可或缺的一部分。本文將探討面粉廠
2023-12-28 16:43:14139 ——來(lái)自迪文開(kāi)發(fā)者論壇本期為大家推送迪文開(kāi)發(fā)者論壇獲獎(jiǎng)開(kāi)源案例——四軸機(jī)械臂控制系統(tǒng)。工程師采用T5L智能屏,基于DGUS軟件“旋轉(zhuǎn)指示”控件實(shí)現(xiàn)機(jī)械臂的實(shí)時(shí)位置顯示,并通過(guò)串口控制機(jī)械臂的運(yùn)動(dòng)
2023-12-23 08:13:19222 
LabVIEW開(kāi)發(fā)六軸工業(yè)機(jī)器人運(yùn)動(dòng)控制系統(tǒng)
本項(xiàng)目開(kāi)發(fā)了一個(gè)高效的工業(yè)機(jī)器人控制系統(tǒng),重點(diǎn)關(guān)注于運(yùn)動(dòng)學(xué)算法和軌跡規(guī)劃算法的實(shí)現(xiàn)和測(cè)試。LabVIEW作為一個(gè)關(guān)鍵技術(shù),在項(xiàng)目中扮演了核心角色
2023-12-21 20:03:18
ZR機(jī)械手:工業(yè)自動(dòng)化的新選擇-速程精密 隨著工業(yè)自動(dòng)化的不斷發(fā)展,越來(lái)越多的企業(yè)開(kāi)始尋求更高效、更精準(zhǔn)的自動(dòng)化解決方案。速程精密成功研發(fā)的ZR機(jī)械手,作為一種新型的工業(yè)自動(dòng)化設(shè)備,正在成為許多企業(yè)
2023-12-19 18:16:03687 、高精度的貼標(biāo)機(jī)的工業(yè)質(zhì)量性能。 瓶子貼標(biāo)生產(chǎn)線的速度大約每小時(shí)5萬(wàn)個(gè)標(biāo)簽,在機(jī)器上以極高的速度運(yùn)行并實(shí)現(xiàn)高精度貼標(biāo)且誤差極小,這些需要使用快速、精密和復(fù)雜的旋轉(zhuǎn)機(jī)械控制來(lái)解決快速機(jī)械手的問(wèn)題,并配備數(shù)十個(gè)在不利、振動(dòng)、潮濕和
2023-12-15 14:53:16172 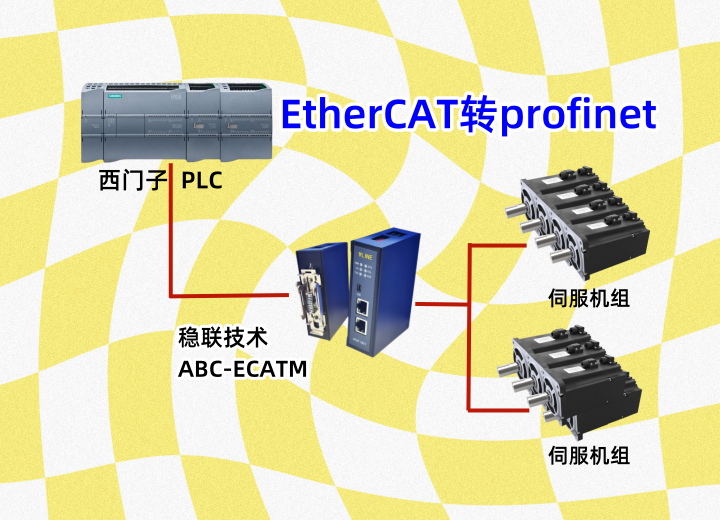
。利用EtherCAT技術(shù)的優(yōu)異性能,可以實(shí)現(xiàn)用傳統(tǒng)現(xiàn)場(chǎng)總線系統(tǒng)所無(wú)法實(shí)現(xiàn)的控制方法。
正運(yùn)動(dòng)技術(shù)的ZMC464運(yùn)動(dòng)控制器,實(shí)際測(cè)試過(guò)100us可以帶16軸EtherCAT伺服運(yùn)行,500us可以帶
2023-12-13 11:37:40
關(guān)于伺服位置控制模式往復(fù)運(yùn)動(dòng)中,在換向時(shí)響聲大,機(jī)械震動(dòng)如何消除?
設(shè)備要求換向時(shí)越快越好,不能以降低機(jī)械剛性為代價(jià)。
有經(jīng)驗(yàn)的兄弟指點(diǎn)一二啊!
2023-12-11 06:49:10
直線模組是一種常見(jiàn)的機(jī)械傳動(dòng)裝置,廣泛應(yīng)用于機(jī)械手等自動(dòng)化設(shè)備中,在機(jī)械手中的主要作用是實(shí)現(xiàn)機(jī)械手的運(yùn)動(dòng)控制和定位。 直線模組具有高精度、高可靠性的特點(diǎn),可以滿足坐標(biāo)機(jī)械手對(duì)運(yùn)動(dòng)精度
2023-12-07 17:38:28
在自動(dòng)化流水線中,機(jī)械手的應(yīng)用比較廣泛,它是集多種工作方式于一身的典型案例。本節(jié)將以機(jī)械手自動(dòng)控制為例,重點(diǎn)講解含多種工作方式的PLC控制系統(tǒng)的設(shè)計(jì)。
2023-12-07 11:36:41683 
電梯控制系統(tǒng)是指電梯的控制系統(tǒng)經(jīng)歷了從簡(jiǎn)單到復(fù)雜的過(guò)程。電梯控制系統(tǒng)由多個(gè)部分組成,包括曳引系統(tǒng)、導(dǎo)向系統(tǒng)、門(mén)系統(tǒng)、轎廂系統(tǒng)、重量平衡系統(tǒng)、電力拖動(dòng)系統(tǒng)和電氣控制系統(tǒng)。
2023-11-27 16:06:23874 運(yùn)動(dòng)控制系統(tǒng)是通過(guò)控制電機(jī)電壓、電流、頻率等輸入量,來(lái)滿足工作機(jī)械的轉(zhuǎn)矩、速度、位移等機(jī)械量,使各種工作機(jī)械按照人們期望的要求運(yùn)行,以滿足生產(chǎn)及應(yīng)用的需要。 運(yùn)動(dòng)控制系統(tǒng)由電機(jī)、功率變換裝置、控制
2023-11-14 15:54:20515 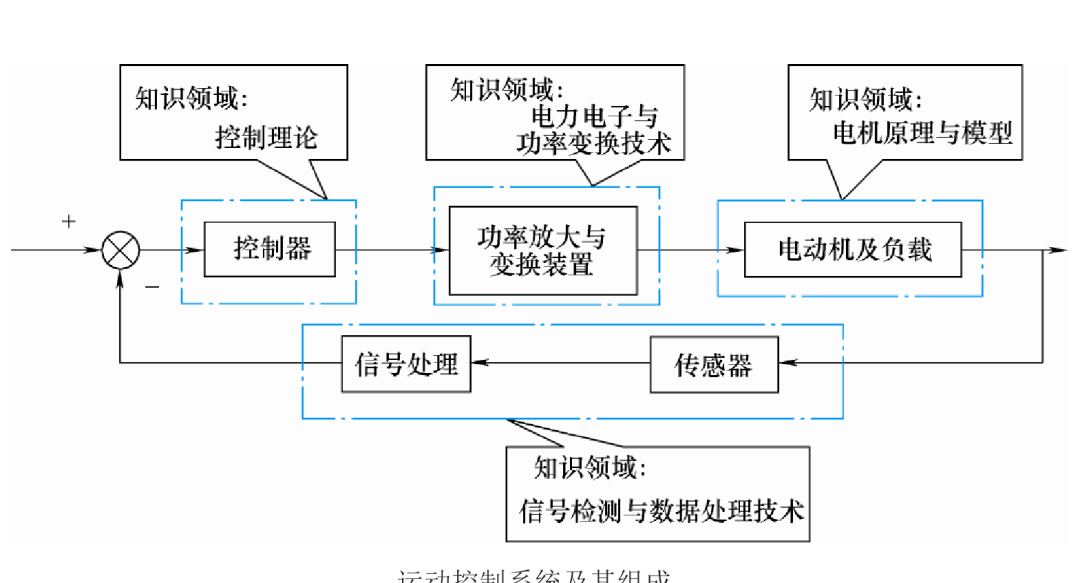
注塑機(jī)械手的配件中滾珠螺桿是重要的一環(huán),在注塑機(jī)械手中起著重要的作用。注塑機(jī)械手是一種自動(dòng)化設(shè)備,可以在注塑生產(chǎn)中實(shí)現(xiàn)自動(dòng)化操作,而滾珠螺桿則是實(shí)現(xiàn)這一操作的關(guān)鍵部件之一。
2023-11-13 17:41:43179 
DIY平衡控制系統(tǒng),需要使用加速度傳感器,三軸或六軸的均可以,哪種靈敏度高一些?
2023-11-10 06:46:11
Control 包含:?jiǎn)?b class="flag-6" style="color: red">軸運(yùn)動(dòng)控制、多軸插補(bǔ)運(yùn)動(dòng)、機(jī)械手正反解算法;EtherCAT 通訊包含 PDO 通訊與 SDO 通訊。SS:System Service,包含 RS232 串口通訊,RS485
2023-11-07 09:52:36
引言: 在本文中,我們將深入探討機(jī)器人學(xué)的兩個(gè)核心概念:正運(yùn)動(dòng)學(xué)和逆運(yùn)動(dòng)學(xué)。這兩個(gè)概念是理解和控制機(jī)械臂運(yùn)動(dòng)的基礎(chǔ)。通過(guò)一個(gè)具體的7軸機(jī)械臂實(shí)例,我們將詳細(xì)介紹如何計(jì)算機(jī)械臂的正運(yùn)動(dòng)學(xué)和逆運(yùn)動(dòng)
2023-11-06 14:58:37498 
的直線。
當(dāng)一個(gè)控制系統(tǒng)的西家傳動(dòng)變頻器和電機(jī)確定以后,我們就可以利用公式計(jì)算和描繪兩條曲線的特殊點(diǎn)。并確定它輸出機(jī)械特性范圍。確立了兩條曲線以后,我們?cè)侔亚€的點(diǎn)代入系統(tǒng)結(jié)構(gòu)圖中的參數(shù)設(shè)置。由此完成
2023-11-02 06:04:57
運(yùn)動(dòng)控制系統(tǒng)其實(shí)運(yùn)動(dòng)控制系統(tǒng)是一個(gè)比較大的系統(tǒng),就像前面的通信系統(tǒng)一樣,通常會(huì)由眾多的組成部分構(gòu)成。運(yùn)動(dòng)控制系統(tǒng)會(huì)綜合信號(hào)分析與處理、自動(dòng)控制、通信等的內(nèi)容。運(yùn)動(dòng)的要素抽象來(lái)講,運(yùn)動(dòng)的要素可概況
2023-10-25 08:07:52814 
科瑞特DMC600系列是一款多功能的運(yùn)動(dòng)控制系統(tǒng),主要應(yīng)用于焊接、拋光、機(jī)械手等設(shè)備。實(shí)現(xiàn)多軸聯(lián)動(dòng),多種插補(bǔ),如:直線、圓弧、拋物線、螺旋線插補(bǔ)等。下面以3軸拋光示教系統(tǒng)為例,舉例工件加工的編輯方法
2023-10-23 08:07:55379 CRT-DMC600MF系列運(yùn)動(dòng)控制系統(tǒng)主要為3至6軸,示教系統(tǒng)主要由運(yùn)動(dòng)控制器和手持盒(Leader30ST)兩個(gè)部分組成。Leader30ST手持盒,為手持控制端,通過(guò)標(biāo)準(zhǔn)Modbus協(xié)議
2023-10-21 08:07:43474 模板的尺寸直接決定了注塑機(jī)機(jī)械手的行程;安全門(mén)的高度關(guān)系到貨物從模具內(nèi)部順利取出到模具外部的情況。在確定了這兩個(gè)關(guān)鍵標(biāo)準(zhǔn)后,有必要考慮注塑機(jī)機(jī)械手的有效載荷是多少,以及它是否滿足注塑制品的重量。之后
2023-10-18 08:07:45419 報(bào)名地址點(diǎn)擊報(bào)名
直播簡(jiǎn)介
1.了解機(jī)械手視覺(jué)引導(dǎo)的應(yīng)用場(chǎng)景
2.了解scara機(jī)器人運(yùn)動(dòng)學(xué)正逆解
3.了解相機(jī)畸變矯正方法
4.了解手眼標(biāo)定-9點(diǎn)標(biāo)定方法
5.了解機(jī)械手旋轉(zhuǎn)中心標(biāo)定方法
6.了解
2023-10-17 15:37:40
通常用什么辦法來(lái)評(píng)估一個(gè)運(yùn)動(dòng)控制系統(tǒng)的動(dòng)態(tài)響應(yīng)速度
2023-10-13 07:12:55
PCL6143運(yùn)動(dòng)控制器的原理及應(yīng)用 可以用于設(shè)計(jì)開(kāi)發(fā)相應(yīng)的芯片電路。介紹了PCL6143 的功能結(jié)構(gòu)、主要寄存器以及指令系統(tǒng)。設(shè)計(jì)了一款基于PC104總線的四軸運(yùn)動(dòng)控制卡, 介紹了如何編寫(xiě)運(yùn)動(dòng)控制卡的功能函數(shù)庫(kù)。
2023-09-26 08:14:08
控制系統(tǒng)的性能變差,不能滿足控制要求。采用一般反饋技術(shù)或開(kāi)環(huán)補(bǔ)償方法不能很好的解決這一問(wèn)題[2l。如要解決上述問(wèn)題,就要求控制器能在運(yùn)行過(guò)程中不斷地測(cè)量受控對(duì)象的特性,并根據(jù)測(cè)得的系統(tǒng)當(dāng)前特性信息,使系統(tǒng)自動(dòng)地按閉環(huán)控制方式實(shí)施最優(yōu)控制。自適應(yīng)機(jī)器人和智能機(jī)器人均能滿足這一控制要求。
2023-09-21 07:55:45
自主設(shè)計(jì) 了一種雙核四軸運(yùn)動(dòng)控制器 。該 運(yùn)動(dòng)控制器 以 MCX314As與 STM32為核心 硬件 。該控制 器不僅能夠完成 四軸 的位置 、速度和 s曲線 的加減 速控 制等功能 ,還 能夠
2023-09-19 08:08:55
,全書(shū)共分為模糊控制技術(shù)基礎(chǔ)、Motorola單片機(jī)及其模糊控制應(yīng)用系統(tǒng)設(shè)計(jì)、Toshiba單片機(jī)及其在家用電器摸糊控制中的應(yīng)用三方面,共七章。第一章簡(jiǎn)單地介紹了模糊控制的數(shù)學(xué)基礎(chǔ),其中的重點(diǎn)是隸屬函數(shù)
2023-09-19 07:07:05
運(yùn)動(dòng)控制
? 精確的位置控制 – 多軸協(xié)調(diào) – 選擇放置, 成形切削 – 自動(dòng)化測(cè)試, DUT處理 ? 精確的速度控制 – 傳送帶,變速電動(dòng)機(jī)
? 高速I(mǎi)/O同步
2023-09-19 06:25:20
了廣大客戶的寶貴意見(jiàn),經(jīng)深圳市科瑞特自動(dòng)化全體同仁的共同努力,推出的一款高端運(yùn)動(dòng)控制系統(tǒng)。1.1系統(tǒng)組成CRT-DMC640ML-8Ax系統(tǒng)主要由雙運(yùn)動(dòng)控制器(DMC64
2023-09-12 08:08:36368 無(wú)錫金紅鷹機(jī)械手可以替代繁重、重復(fù)和危險(xiǎn)的人力勞動(dòng),減少企業(yè)的人力成本,并解決勞動(dòng)力不足的問(wèn)題,有了它可以24小時(shí)連續(xù)工作,不需要休息,提高生產(chǎn)效率和產(chǎn)能。
2023-09-08 16:30:41130 
集運(yùn)動(dòng)控制器、機(jī)器人控制系統(tǒng)和六軸伺服驅(qū)動(dòng)于一體
? 體積小、功率密度高、集成度高,適合20KG以下機(jī)器人 ? 采用多自由度和非線性控制算法,實(shí)現(xiàn)高動(dòng)態(tài)響應(yīng)、高精度的電流、速度及位置控制? 支持
2023-09-07 07:57:07
系統(tǒng)提供動(dòng)力。2.電機(jī):電機(jī)是系統(tǒng)的核心部件,將電能轉(zhuǎn)化為機(jī)械能,產(chǎn)生轉(zhuǎn)動(dòng)力和運(yùn)動(dòng)。3.控制器:控制器是電機(jī)控制系統(tǒng)的大腦,負(fù)責(zé)對(duì)電機(jī)進(jìn)行控制和調(diào)節(jié)。它通過(guò)讀取傳
2023-08-30 08:08:445112 當(dāng)涉及到控制系統(tǒng)中的精確調(diào)節(jié)和穩(wěn)定性,PID(比例-積分-微分)控制算法是一種不可或缺的工具。本文將簡(jiǎn)單介紹 PID 控制算法,從基本概念到具體實(shí)現(xiàn),一起了解如何使用 PID 控制算法來(lái)優(yōu)化控制系統(tǒng)。
2023-08-29 16:39:041105 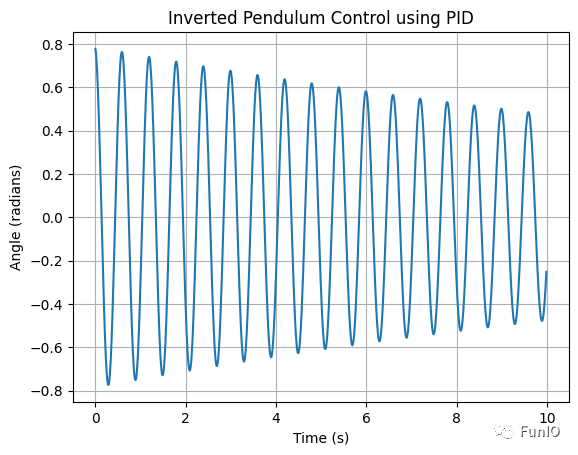
, 采摘機(jī)器人結(jié)構(gòu)簡(jiǎn)圖如圖1.3所示。主要研究了采摘機(jī)器人的全向移動(dòng)底盤(pán)、機(jī)械手及其控制、視覺(jué)識(shí)別系統(tǒng)和整機(jī)的控制系統(tǒng)。
?
圖1.2草莓采摘機(jī)器人系統(tǒng)框圖
?
圖1.3整機(jī)采摘機(jī)器人結(jié)構(gòu)圖
根據(jù)某
2023-08-16 17:35:54
直線模組在機(jī)械手中的應(yīng)用
2023-08-04 17:48:22816 
全自動(dòng)拆包機(jī)械手 常見(jiàn)的PP、PE、PVC塑料顆粒通常是由人工進(jìn)行破包上料,為題升自動(dòng)化水平減少人工成本,很多企業(yè)開(kāi)始用拆包機(jī)械手進(jìn)行這一作業(yè),拆包機(jī)械手是由機(jī)器人拆垛系統(tǒng)、包裝袋輸送系統(tǒng)
2023-08-03 10:48:21364 
LPDDR2 DMC是一款符合高級(jí)微控制器總線架構(gòu)(AMBA)的片上系統(tǒng)(SoC)外圍設(shè)備,由ARM開(kāi)發(fā)、測(cè)試和許可。
LPDDR2 DMC是一款高性能、區(qū)域優(yōu)化的LPDDR和LPDDR2 SDRAM內(nèi)存控制器,與AMBA AXI協(xié)議兼容。
2023-08-02 18:41:16
為核心,形成運(yùn)動(dòng)控制核心部件類、系統(tǒng)類、整機(jī)類的產(chǎn)品體系,覆蓋了高性能運(yùn)動(dòng)控制器、伺服驅(qū)動(dòng)器、驅(qū)控一體機(jī)、工業(yè)自動(dòng)化組件、工業(yè)軟件、垂直行業(yè)專用控制系統(tǒng)、特種裝備等裝備制造核心環(huán)節(jié)。比如機(jī)械手的驅(qū)動(dòng)器、運(yùn)動(dòng)控制期
2023-08-02 14:51:07241 本設(shè)計(jì)中我們根據(jù)生產(chǎn)線控制系統(tǒng)點(diǎn)多.線長(zhǎng)以及易于維護(hù)和系統(tǒng)升級(jí)的特點(diǎn),選用松下PLC的PC-LINK網(wǎng)絡(luò)進(jìn)行系統(tǒng)設(shè)計(jì).FPΣ系列PLC強(qiáng)大的網(wǎng)絡(luò)通訊功能和PC-LINK網(wǎng)絡(luò)把機(jī)械手搬運(yùn)系統(tǒng)單元.貨物自動(dòng)識(shí)別緩沖系統(tǒng)單元.堆垛系統(tǒng)單元和自動(dòng)化倉(cāng)庫(kù)系統(tǒng)單元進(jìn)行連接組成一個(gè)完整的生產(chǎn)線培訓(xùn)控制系統(tǒng)模型.
2023-08-01 21:27:09330 ,經(jīng)深圳市科瑞特自動(dòng)化全體同仁的共同努力,推出的一款高端運(yùn)動(dòng)控制系統(tǒng)。1.系統(tǒng)組成CRT-DMC660ML系統(tǒng)主要由運(yùn)動(dòng)控制器(DMC2600M)和手持盒(Lead
2023-07-31 22:30:04351 客戶介紹本文要介紹的客戶是一家位于東莞市的設(shè)備制造商,專注于研發(fā)和生產(chǎn)各類自動(dòng)化生產(chǎn)線,包括送料機(jī)、機(jī)械手、沖床周邊整套自動(dòng)化生產(chǎn)線。多年來(lái),該客戶在工業(yè)自動(dòng)化領(lǐng)域積累了豐富的經(jīng)驗(yàn),為家電、汽車
2023-07-24 14:47:56368 
控制裝置的優(yōu)點(diǎn),在許多場(chǎng)合, PLC可以構(gòu)成各種綜合控制系統(tǒng),例如構(gòu)成邏輯控制系統(tǒng)、過(guò)程控制系統(tǒng)等。它比單片機(jī)簡(jiǎn)單、靈活,能夠適用惡劣的礦業(yè)環(huán)境,抗干擾能力強(qiáng);在相同 I/0 點(diǎn)數(shù)的系統(tǒng)中,比 DCs成本要低40% 左右,且具有可靠性高、功能強(qiáng)
2023-07-18 15:31:17 3
3 電子發(fā)燒友網(wǎng)站提供《如何制作無(wú)線/手勢(shì)控制機(jī)械手.zip》資料免費(fèi)下載
2023-07-10 15:04:421 本設(shè)計(jì)中我們根據(jù)生產(chǎn)線控制系統(tǒng)點(diǎn)多.線長(zhǎng)以及易于維護(hù)和系統(tǒng)升級(jí)的特點(diǎn),選用松下PLC的PC-LINK網(wǎng)絡(luò)進(jìn)行系統(tǒng)設(shè)計(jì).FPΣ系列PLC強(qiáng)大的網(wǎng)絡(luò)通訊功能和PC-LINK網(wǎng)絡(luò)把機(jī)械手搬運(yùn)系統(tǒng)單元.貨物自動(dòng)識(shí)別緩沖系統(tǒng)單元.堆垛系統(tǒng)單元和自動(dòng)化倉(cāng)庫(kù)系統(tǒng)單元進(jìn)行連接組成一個(gè)完整的生產(chǎn)線培訓(xùn)控制系統(tǒng)模型.
2023-07-06 13:29:32249 一、示教基礎(chǔ)知識(shí)? 在工業(yè)控制領(lǐng)域,示教系統(tǒng)是一種通過(guò)示教編程存儲(chǔ)運(yùn)動(dòng)動(dòng)作,然后將存儲(chǔ)的動(dòng)作重現(xiàn)出來(lái)的一種非常流行的人機(jī)交互式的控制系統(tǒng)。一個(gè)完整的示教系統(tǒng)由機(jī)械結(jié)構(gòu)部分,驅(qū)動(dòng)部分,控制系統(tǒng)
2023-07-04 10:42:02402 
一、示教基礎(chǔ)知識(shí)在工業(yè)控制領(lǐng)域,示教系統(tǒng)是一種通過(guò)示教編程存儲(chǔ)運(yùn)動(dòng)動(dòng)作,然后將存儲(chǔ)的動(dòng)作重現(xiàn)出來(lái)的一種非常流行的人機(jī)交互式的控制系統(tǒng)。一個(gè)完整的示教系統(tǒng)由機(jī)械結(jié)構(gòu)部分,驅(qū)動(dòng)部分,控制系統(tǒng)
2023-07-03 10:00:39270 ?全自動(dòng)拆包機(jī)械手 全自動(dòng)拆包機(jī)械手是由機(jī)器人拆垛機(jī)、皮帶進(jìn)料機(jī)、破袋裝置、篩分裝置、中間支架、收塵裝置、螺旋輸送機(jī)、控制箱七部分組成,它結(jié)構(gòu)緊湊,精巧美觀,操作簡(jiǎn)單方便,消耗功率小,安裝快捷方便
2023-06-28 10:12:30156 梳理、分析了核化工項(xiàng)目中各類機(jī)械手的工作原理和功能特點(diǎn),并就各類機(jī)械手的適用場(chǎng)景進(jìn)行了對(duì)比,介紹了在選擇和設(shè)計(jì)機(jī)械手時(shí)需考慮的因素,總結(jié)了當(dāng)前的研究進(jìn)展和未來(lái)的發(fā)展趨勢(shì),以期為今后其他項(xiàng)目的機(jī)械手
2023-06-25 14:23:052142 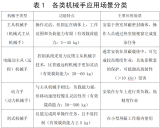
運(yùn)動(dòng)控制器的工作原理是將預(yù)定的控制方案、規(guī)劃指令轉(zhuǎn)變成期望的機(jī)械運(yùn)動(dòng),實(shí)現(xiàn)機(jī)械運(yùn)動(dòng)精確的位置(點(diǎn)位、運(yùn)動(dòng)軌跡、插補(bǔ)等)控制、速度控制、加速度控制、轉(zhuǎn)矩或力的控制。
2023-06-25 10:44:542153 
全自動(dòng)破袋機(jī)械手,拆袋破袋機(jī)器人是全自動(dòng)、智能化、一體化原料包裝袋拆垛、拆包、回收、輸送、除塵系統(tǒng)。除叉車上垛外,無(wú)需人工操作,它是由機(jī)械手抓手將要拆卸的物料袋抓取提升至割袋裝置上方,由割刀裝置
2023-06-24 15:32:26403 設(shè)計(jì)了一種窨井清挖機(jī)械手液壓系統(tǒng),首先擬定窨井清挖機(jī)械手液壓系統(tǒng)原理圖,該液壓系統(tǒng)由定量泵、電磁溢流閥、電磁換向閥、液壓鎖、雙單向節(jié)流閥、單向順序閥、調(diào)速閥及液壓缸等元件組成,液壓系統(tǒng)每個(gè)支路獨(dú)立動(dòng)作實(shí)現(xiàn)機(jī)械手的工作循環(huán);然后利用AMESim仿真軟件對(duì)該液壓系統(tǒng)進(jìn)行仿真,驗(yàn)證了方案的可行性。
2023-06-15 14:12:27376 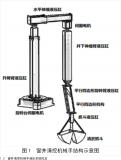
運(yùn)動(dòng)控制在實(shí)際的工業(yè)現(xiàn)場(chǎng)中隨處可見(jiàn),也常聽(tīng)到大家提到運(yùn)動(dòng)控制;哪什么叫運(yùn)動(dòng)控制?以及基本概念有哪些?下面我們?yōu)榇蠹易?b class="flag-6" style="color: red">簡(jiǎn)單的介紹
2023-06-14 09:40:59312 
典型的運(yùn)動(dòng)控制器卡和模塊包括運(yùn)動(dòng)控制IC、微處理器以及用于處理高速編碼器信號(hào)的DSP或定制ASIC。控制器向驅(qū)動(dòng)器或放大器提供速度和旋轉(zhuǎn)方向信號(hào),進(jìn)而提供適當(dāng)?shù)碾妷汉碗娏鳎üβ剩┧絹?lái)操作電機(jī)。要設(shè)計(jì)具有反饋的魯棒且容錯(cuò)的運(yùn)動(dòng)控制系統(tǒng),必須在設(shè)計(jì)期間在系統(tǒng)級(jí)別解決以下事項(xiàng):
2023-06-12 14:51:11424 
電子發(fā)燒友網(wǎng)站提供《基于Arduino和PIR運(yùn)動(dòng)傳感器的自動(dòng)多燈控制系統(tǒng).zip》資料免費(fèi)下載
2023-06-12 09:56:010 一、運(yùn)功控制核心
單軸運(yùn)動(dòng)、多軸直線插補(bǔ)運(yùn)動(dòng)、圓弧插補(bǔ)、連續(xù)軌跡插補(bǔ)
電子齒輪、電子凸輪
多維硬件位置比較觸發(fā)
高速位置鎖存
機(jī)器視覺(jué)飛拍
高速PWM輸出
二、一站式解決方案
32軸
2023-06-01 09:39:23
大科技數(shù)字大田精準(zhǔn)化快速控制數(shù)字采集控制系統(tǒng)基本介紹田小二?數(shù)字(采集控制)系統(tǒng)C2是禾大科技自主研發(fā)的一種將傳統(tǒng)農(nóng)業(yè)設(shè)施進(jìn)行數(shù)字化升級(jí)改造的設(shè)備,可實(shí)現(xiàn)環(huán)境信息采
2023-05-31 15:04:32
平面關(guān)節(jié)型機(jī)械手設(shè)
2023-05-29 11:11:330 通常的機(jī)械臂都是由多路舵機(jī)組成,我使用的是某寶上(并不)常見(jiàn)的五自由度機(jī)械臂。盡管商家稱它為六自由度。這里使用STM32F407VGT6的6路PWM輸出通道來(lái)控制6個(gè)舵機(jī)的運(yùn)動(dòng),樹(shù)莓派(上位機(jī))通過(guò)
2023-05-26 16:50:560 運(yùn)動(dòng)控制是工業(yè)自動(dòng)化系統(tǒng)的子系統(tǒng)。它同步化控制多個(gè)電機(jī)來(lái)完成一系列運(yùn)動(dòng)。例如,多軸機(jī)械臂需要多個(gè)電機(jī)無(wú)縫地協(xié)同運(yùn)行才能做出特定的動(dòng)作。運(yùn)動(dòng)控制主要用于軌跡規(guī)劃、速度規(guī)劃、插補(bǔ)算法和運(yùn)動(dòng)學(xué)轉(zhuǎn)換。運(yùn)動(dòng)控制系統(tǒng)經(jīng)常出現(xiàn)在印刷、包裝和裝配應(yīng)用中。
2023-05-25 10:28:55410 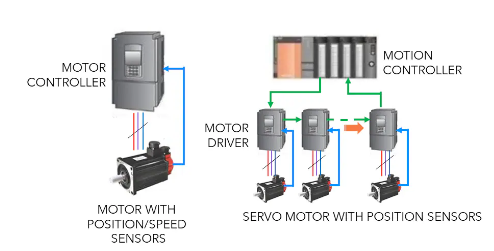
照明控制系統(tǒng)是為照明服務(wù)的,系統(tǒng)的質(zhì)量和性能應(yīng)當(dāng)滿足用戶的要求,通常要求照明控制系統(tǒng)能技術(shù)先進(jìn)、自動(dòng)化程度高、運(yùn)行穩(wěn)定、安全可靠、操作方便、維護(hù)簡(jiǎn)單、安裝擴(kuò)展容易、成本要低,這里我們結(jié)合安科瑞照明控制系統(tǒng)的特點(diǎn)與大家共同探討一下在選用照明控制系統(tǒng)中需要考慮的幾個(gè)方面。
2023-05-16 13:35:40384 ZMC408SCAN 激光振鏡運(yùn)動(dòng)控制器是正運(yùn)動(dòng)技術(shù)推出的高性能總線雙振鏡運(yùn)動(dòng)控制器,專為工業(yè)激光+振鏡+運(yùn)動(dòng)控制方面的應(yīng)用而設(shè)計(jì),通過(guò) EtherCAT 總線和脈沖軸接口能實(shí)現(xiàn)多軸運(yùn)動(dòng)控制
2023-05-10 15:06:30
運(yùn)動(dòng)控制系統(tǒng)多種多樣,但從基本結(jié)構(gòu)上看,一個(gè)典型的現(xiàn)代運(yùn)動(dòng)控制系統(tǒng)的硬件主要由:上位機(jī)、運(yùn)動(dòng)控制器、功率驅(qū)動(dòng)裝置、電動(dòng)機(jī)、執(zhí)行機(jī)構(gòu)和傳感器反饋檢測(cè)裝置等部分組成。
2023-05-10 11:46:211048 
實(shí)際上是形成運(yùn)動(dòng)的速度和位置的基準(zhǔn)量。合適的基準(zhǔn)量不但可以改善軌跡的精度,而且其影響作用還可以降低對(duì)轉(zhuǎn)動(dòng)系統(tǒng)以及機(jī)械傳遞元件的要求。通用運(yùn)動(dòng)控制器通常都提供基于對(duì)沖擊、加速度和速度等這些可影響動(dòng)態(tài)軌跡精度的量值加以限制的運(yùn)動(dòng)規(guī)劃方法,用戶可以直接調(diào)用相應(yīng)的函數(shù)。
2023-05-09 14:39:50636 、電子齒輪、同步跟隨、虛擬軸、機(jī)械手指令等簡(jiǎn)單的軌跡控制需求;采用優(yōu)化的網(wǎng)絡(luò)通訊協(xié)議可以實(shí)現(xiàn)實(shí)時(shí)的運(yùn)動(dòng)控制。EC4410 系列經(jīng)濟(jì)型多軸運(yùn)動(dòng)控制卡可用于電子半導(dǎo)體設(shè)備(檢測(cè)類設(shè)備、組裝類設(shè)備、鎖附類設(shè)備、焊錫機(jī))、點(diǎn)膠設(shè)備和流水線等 1
2023-04-28 09:56:510 在設(shè)計(jì)耐輻射運(yùn)動(dòng)控制系統(tǒng)片上(SoC)時(shí),需要考慮許多挑戰(zhàn)。第一個(gè)設(shè)計(jì)挑戰(zhàn)是運(yùn)動(dòng)控制系統(tǒng)本身。此類空間應(yīng)用通常涉及概念化可支持各種運(yùn)動(dòng)控制應(yīng)用的多功能部件。這涉及將電路劃分為可實(shí)現(xiàn)的功能,這些功能可以在用于特定模塊的IC工藝的預(yù)期功率和額定電壓限制內(nèi)實(shí)現(xiàn)。
2023-04-24 09:50:51826 
運(yùn)動(dòng)控制系統(tǒng)開(kāi)發(fā)與應(yīng)用 運(yùn)動(dòng) 是以 為控制對(duì)象,以控制器為核心,以電力電子、功率變換裝置為執(zhí)行機(jī)構(gòu),在控制理論指導(dǎo)下組成的電氣傳動(dòng)控制系統(tǒng)。運(yùn)動(dòng)控制系統(tǒng)多種多樣,但從基本結(jié)構(gòu)上看,一個(gè)典型的現(xiàn)代運(yùn)動(dòng)
2023-04-21 18:04:19690 運(yùn)動(dòng)控制系統(tǒng) 其實(shí)運(yùn)動(dòng)控制系統(tǒng)是一個(gè)比較大的系統(tǒng),就像前面的通信系統(tǒng)一樣,通常會(huì)由眾多的組成部分構(gòu)成。運(yùn)動(dòng)控制系統(tǒng)會(huì)綜合信號(hào)分析與處理、自動(dòng)控制、通信等的內(nèi)容。 運(yùn)動(dòng)的要素 抽象來(lái)講,運(yùn)動(dòng)的要素
2023-04-21 18:02:141209 大家好,今天小阿暢為大家?guī)?lái)的是三菱PLC控制機(jī)械手的一個(gè)實(shí)例,快來(lái)一起看看吧!
2023-04-20 10:04:403976 深圳泰科智能機(jī)器人TB6-R3協(xié)作機(jī)器人是一款靈活的小型工業(yè)協(xié)作機(jī)器人,其精巧的機(jī)械結(jié)構(gòu)設(shè)計(jì),外形緊湊,能夠適應(yīng)狹小的工作空間,及高精密的工作任務(wù)需求;這款協(xié)作機(jī)器人自重僅為11.5KG,有效負(fù)載為3KG,工作半徑達(dá)666mm,是輕型裝配和高精度控制的理想選擇。
2023-04-19 10:13:59
PLC控制系統(tǒng)是一種基于可編程邏輯控制器(PLC)的自動(dòng)化控制系統(tǒng),主要用于工廠自動(dòng)化、機(jī)械控制、加工等領(lǐng)域。PLC控制系統(tǒng)具有可編程、可擴(kuò)展、穩(wěn)定可靠、反應(yīng)速度快等特點(diǎn)。
2023-03-28 18:21:053347 遠(yuǎn)程控制系統(tǒng)的紅外接收模塊
2023-03-28 18:15:14
拆包機(jī)械手
2023-03-23 11:11:28355
 電子發(fā)燒友App
電子發(fā)燒友App
















 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論