CAN 芯片將數(shù)據(jù)根據(jù)協(xié)議組織成一定的報文格式發(fā)出,這時網(wǎng)上的其它站處于接收狀態(tài)。每個處于接收狀態(tài)的站對接收到的報文進行檢測,判斷這些報文是否是發(fā)給自己的,以確定是否接收它。
2021-05-28 05:08:00 6991
6991 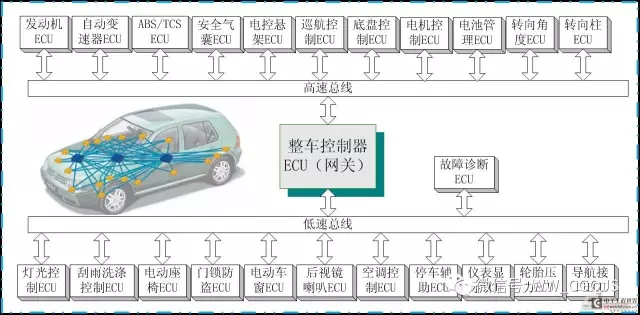
CAN總線上傳輸?shù)男畔⒎Q為報文,當總線空閑時任何連接的單元都可以開始發(fā)送新的報文。
2022-09-26 14:15:5212354 CAN總線上傳輸?shù)男畔⒎Q為報文,當總線空閑時任何連接的單元都可以開始發(fā)送新的報文。
2022-09-28 15:20:401064 
現(xiàn)象描述:
在發(fā)送多幀報文數(shù)據(jù)時,出現(xiàn)了較為嚴重的報文丟失現(xiàn)象。編寫測試程序,在for循環(huán)中循環(huán)發(fā)送id為0-7ff的報文,對返回值進行了判斷。期待收到的報文id為連續(xù)的,且步長為1。但實際id并不
2024-02-02 07:48:51
; 設置標識符(ID),數(shù)據(jù)長度和發(fā)送數(shù)據(jù) -> 設置 CAN_TIxR 的 TXRQ 位為 1,請求發(fā)送 -> 郵箱掛號(等待成為最高優(yōu)先級) -> 預定發(fā)送(等待總線空閑)-> 發(fā)送 -> 郵箱空置。整個流程如圖所示:上圖中,還包含了很多其他處理,不強制退出發(fā)送(AB
2021-08-19 08:33:55
CAN協(xié)議具有哪些特點?STM32F4的bxCAN的主要特點是什么?CAN發(fā)送接收流程是怎樣的?
2021-10-22 09:31:58
有DBC文件,有CAN卡PXI8513,希望編輯一個VI,能夠把接收到的CAN報文像NI-XNET Bus monitor的“Signals”那樣,解析成一個一個的信號。想請問各位有沒有類似的DEMO參考?
2017-06-15 00:14:03
本帖最后由 于圭 于 2015-1-23 16:33 編輯
我用labview通過CAN總線發(fā)數(shù)據(jù),單片機發(fā)過來的數(shù)據(jù)有3個不同的報文ID,我要怎么正確的把這3個報文里面的數(shù)據(jù)讀取出來,求大神指教!!
2014-12-31 14:46:41
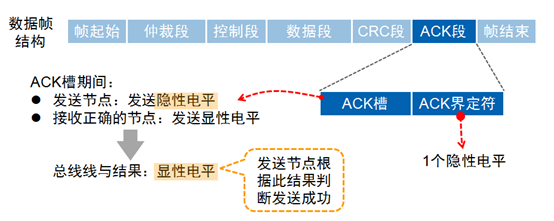
錯誤(ACKNOWLEDGMENT ERROR)。 從協(xié)議所描述的內容來看,我們不難得出一個結論:CAN是一種基于廣播的通訊方式,為了保證總線上的每一個節(jié)點(處于normal mode)都能正確的接收到報文,報文的發(fā)送者要求每一個
2018-07-02 05:22:54
1. CAN報文定義CAN報文是指發(fā)送單元向接受單元傳送數(shù)據(jù)的幀。我們通常所說的CAN報文是指在CAN線(內部CAN、整車CAN、充電CAN)上利用ECU和CAN卡接收到的十六進制報文。2. CAN
2021-09-14 09:23:24
問大家一個問題哈,對于一個主板,多個從板的系統(tǒng),如何實現(xiàn)CAN報文的濾波,以實現(xiàn)對應從板接收對應的報文。
2017-02-08 09:27:41
我用labview通過CAN總線發(fā)數(shù)據(jù),控制器發(fā)過來的數(shù)據(jù)有3個不同的報文ID,我要怎么正確的把這3個報文里面的數(shù)據(jù)讀取出來,求大神指教!!多謝多謝
2021-07-23 11:02:50
CAN報文怎樣設置單次發(fā)送和循環(huán)發(fā)送?類似圖片可以單次發(fā)送也可以循環(huán)發(fā)送,循環(huán)時間也可以修改,數(shù)據(jù)內容也可以修改問題關鍵在于多報文怎樣去設置?當前的思路是每一幀一個獨立線程,通過主循環(huán)消息隊列傳送消息進入報文循環(huán)線程,報文線程分為單次和循環(huán)分支
2021-10-26 11:54:33
CAN總線中報文數(shù)據(jù)讀取方法motorola編碼格式的CAN報文解析需要知道DBC的哪些信息排序方式讀取方式發(fā)送方式注motorola編碼格式的CAN報文解析知道CAN報文的DBC,即可按以下
2022-01-12 07:28:16
CAN控制器的特點有哪些呢?CAN協(xié)議仲裁功能該如何去實現(xiàn)呢?CAN協(xié)議的發(fā)送流程與接收流程是怎樣的?
2021-11-08 07:59:06
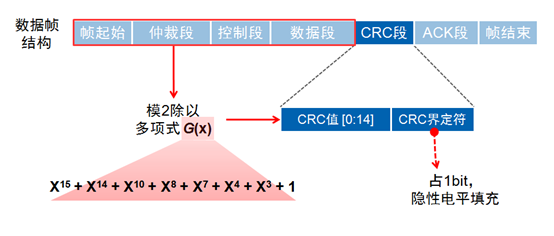
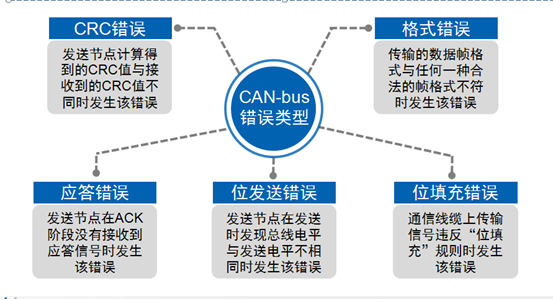
安全性,在每個CAN節(jié)點中均設有錯誤檢測,標定和自檢的強有力措施。檢測措施包括:發(fā)送自檢,循環(huán)冗余校驗,位填充,和報文格式檢查。(9),出錯標注和恢復時間:已損壞的報文由檢驗出錯的節(jié)點進行標注。這樣的報文
2014-04-27 15:16:02
在物聯(lián)網(wǎng)逐漸普及的今天,CAN-bus 總線作為一種有線的局域控制網(wǎng)絡,有越來越多的客戶需求進行遠程監(jiān)控。比如車輛的 CAN 報文記錄儀,以往只能在車返回后,才能讀取行駛數(shù)據(jù)。這樣不能快速實時地監(jiān)測
2022-10-17 07:33:01
CAN報文接收時MASK的值為0時 不管ID是多少 都接收MASK為1時看發(fā)送節(jié)點ID與驗收碼是否一致同一位上同是0或者同是1則接收,否則不接收對嗎????
2013-01-02 20:04:53
安全性,在每個CAN節(jié)點中均設有錯誤檢測,標定和自檢的強有力措施。檢測措施包括:發(fā)送自檢,循環(huán)冗余校驗,位填充,和報文格式檢查。(9),出錯標注和恢復時間:已損壞的報文由檢驗出錯的節(jié)點進行標注。這樣
2014-04-18 16:36:30
版本規(guī)定CAN控制器必須有一個11位的標志符。同時,在2.0B版本中規(guī)定,CAN控制器的標志符長度可以是11位或29位。遵循CAN2.0B協(xié)議的CAN控制器可以發(fā)送和接收11位標識符的標準格式報文或
2017-10-19 11:12:46
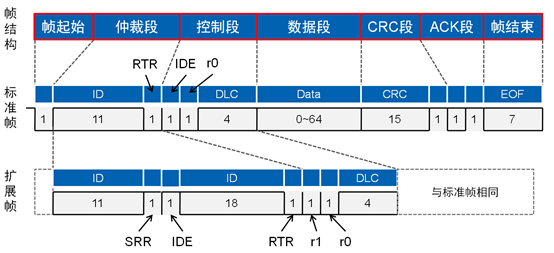
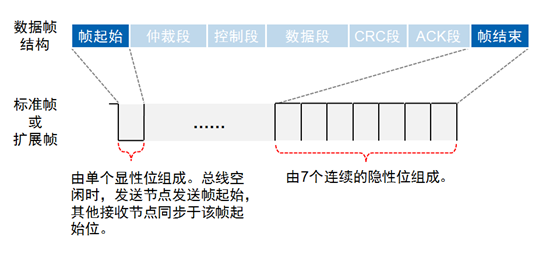
集中化總線控制,所有主要通信,包括總線讀取 (許可)控制,在系統(tǒng)中分幾次完成。這是實現(xiàn)有較高可靠性的通信系統(tǒng)的唯一方法。2、CAN的報文格式在總線中傳送的報文,每幀由7部分組成。CAN協(xié)議支持兩種報文格式
2015-11-05 17:17:31
CAN總線的發(fā)送基本概念報文的作用報文的格式CAN.C代碼//CAN發(fā)送一組數(shù)據(jù)(固定格式:ID為0X12,標準幀,數(shù)據(jù)幀)//msg:數(shù)據(jù)指針,最大為8個字節(jié),len:數(shù)據(jù)長度(最大為8
2021-08-19 08:17:55
格式實現(xiàn)報文的打包封裝,通過CAN 控制器發(fā)送CAN 數(shù)據(jù)幀必須具有的同步、順序控制、錯誤控制和流控制,自動產(chǎn)生CRC 校驗位和ACK 應答位插入數(shù)據(jù)幀中。J1939 物理層協(xié)議規(guī)定了每個網(wǎng)段最多
2019-04-08 09:42:13
CAN的五種幀分別是哪些?如何去設置CAN的波特率呢?CAN的發(fā)送與接收流程是怎樣的呢?
2021-11-09 07:54:59
最近,在調試STM32的can總線,遇到一個問題,can發(fā)送報文時,有一個自動重傳模式。也就是can發(fā)送完一幀報文后,如果因為ID競爭失敗或者出錯導致發(fā)送失敗后,如果使能了自動重傳,它會接著進行重新發(fā)送
2014-01-02 10:23:30
比較簡單,就是兩個功能:ARP request,ARP response;即一個 ARP 查詢報文,一個 ARP 回復報文。 ARP 報文格式 ARP 報文與 IP 報文都是附著在 ETH 幀之上
2022-10-19 11:55:30
用Labview的模板,搭建了一個發(fā)送CAN信號的VI,導入DBC文件后,while循環(huán)運行但是沒有CAN報文發(fā)出
2019-07-18 13:36:06
還有目前我司有人做了基于DBC開發(fā)的測試工具,可以通過執(zhí)行語句來發(fā)送不同的can報文內容。。。我也想知道個中原理!謝謝各位大神
2019-11-06 23:00:54
1、我使用新唐M453單片機,使用CAN1進行實驗,將CAN1的后4個報文緩存RAM做為發(fā)送緩沖區(qū)來使用。通過線程啟動報文的發(fā)送,在中斷中通過查詢發(fā)送請求寄存器來判斷哪個發(fā)送緩沖區(qū)空閑,再進行發(fā)送
2023-06-15 07:26:44
();
}
如此配置發(fā)現(xiàn)在一幀報文發(fā)送完了后,不能進入can的發(fā)送中斷,
2、能有別的標志位來判斷can報文的發(fā)送嗎,不是太想用發(fā)送中斷
2024-02-18 08:33:18
_CS_EDL(pTxFrame->edl))。我測試的結果是FLEXCANFD還可以同時接收CAN2.0B和CANFD幀格式的CAN報文。但是我無法通過flexcan_fd_frame_t.edl來區(qū)分接收
2023-03-20 08:11:52
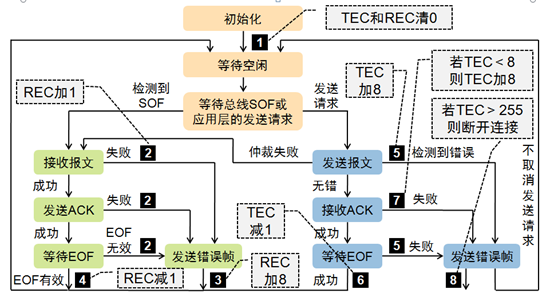
四種狀態(tài),空狀態(tài),掛號狀態(tài),預定發(fā)送狀態(tài)(scheduled),發(fā)送狀態(tài)。發(fā)送報文的流程為:應用程序選擇1個空發(fā)送郵箱;設置標識符,數(shù)據(jù)長度和待發(fā)送數(shù)據(jù);然后對CAN_TIxR寄存器的TXRQ位置’1
2018-03-19 15:43:08
目錄:一、CAN通信原理1.CAN通信簡介2.CAN通信優(yōu)點3.CAN總線物理層4.CAN報文種類5.數(shù)據(jù)幀格式6.仲裁過程7.位同步二、STM32的CAN控制器1.功能特點2.STM32CAN架構
2021-08-19 06:34:16
`源模塊一直處于發(fā)送狀態(tài),這時開發(fā)板去接收報文會出現(xiàn)錯誤,如圖所示:左圖是用CAN盒持續(xù)發(fā)送報文,有圖是CAN接收結構體的值,可以看出結構體中的值除了ID正確,其他都錯誤。但是我先讓開發(fā)板進入等待接收狀態(tài),再讓CAN盒發(fā)送報文,就完全正確。如圖:請問這是哪方面的問題呢?`
2018-06-14 15:31:59
TC387模塊CAN0的節(jié)點2作為CANA使用,CAN1的節(jié)點0作為CANB使用,配置基本相同。但CANB的通信正常,而在TJA1145正常情形下,CANA既收不到報文,也發(fā)不出報文,查看CAN
2024-02-19 06:43:51
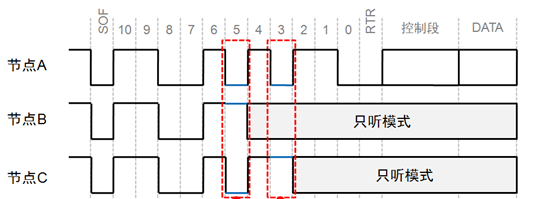
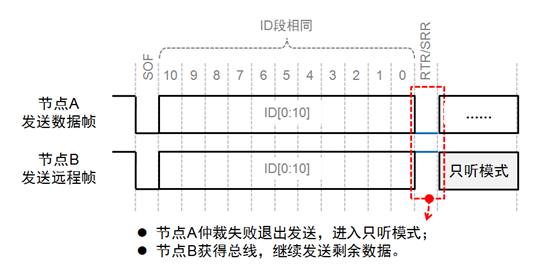
時,發(fā)送高優(yōu)先級ID消息的單元可獲得發(fā)送權; 2、消息的發(fā)送 在can協(xié)議中,所有消息都是以固定格式發(fā)送。總線空閑時,所有與總線相連的單元都可以開始發(fā)送新消息。兩個以上的單元同時開始發(fā)送
2015-01-22 16:12:04
我有個倍加福的傳感器(附件1)是LIN接口。買了個魔帆電子的232-LIN轉換器(附件2),想通過串口對傳感器調試。轉換器的手冊里寫到根據(jù)串口轉LIN通信協(xié)議,報文格式如下。我從電腦串口發(fā)送握手
2017-12-25 10:47:14
本人使用英飛凌的xc886單片機,此單片機內含muliCAN模塊。請教下:can發(fā)送報文能連續(xù)發(fā)多個報文嗎(非FIFO模式,就是一幀一幀的發(fā))?因為我寫了個例子:發(fā)送方:用報文1、2、3發(fā)送數(shù)據(jù)
2012-11-23 15:47:44
值往往>100,所以往后的數(shù)據(jù)都是0 0 0 0 0 所以無法采樣數(shù)據(jù),也就無法正確錄波。小弟的61850解析程序是求教別人的,應該沒問題,所以現(xiàn)在懷疑兩方面:1 mu發(fā)送數(shù)據(jù)的格式并非9-2報文格式
2012-04-05 15:15:09
can通信發(fā)送自定義報文
2019-03-28 16:46:16
1.我在CAN1上發(fā)送報文因為周期不同,所以用了7個while來發(fā)送不同的報文,請問有什么更好的解決方案嗎?2.測試過程中發(fā)現(xiàn)另一臺電腦接收到的報文顯示的周期相較發(fā)送周期差距較大是什么原因導致的?
2022-05-12 17:43:45
的定位,是許多物聯(lián)網(wǎng)應用的基礎,這篇blog將向大家簡單的介紹如何使用python腳本在dragonboard 410c上解析GPS報文數(shù)據(jù)。 首先我們需要了解GPS報文格式,這里我們介紹和使用的是目前
2018-09-28 11:54:39
通過研究CAN2.0B協(xié)議規(guī)范,對報文格式的分析和標識符的分配,設計出了基于CAN總線的智能建筑監(jiān)控系統(tǒng)的通信協(xié)議。
2021-06-02 06:48:03
有沒有用LabVIEW做過CAN報文接收和發(fā)送的,用庫函數(shù)進行發(fā)送和接收。有時候發(fā)送一會LabVIEW閃退,直接退出程序,有時候又能正常接收發(fā)送。不知道有沒有碰到這種情況的
2015-04-03 14:06:54
在調試程序的時候,我們可以通過CAN報文把一些關鍵變量的值輸出,來觀察程序的運行狀態(tài),下面我們就來看一下如何輸出CAN報文,并在發(fā)送成功后,觸發(fā)一個CAN中斷。1.首先要包含CAN驅動頭文件
2022-02-22 06:43:38
。假設報文格式如下圖所示,整個報文包包含4個字,每個bit組合均代表不同的涵義。下面我們根據(jù)該報文格式進行報文合成和報文解析。報文格式2.報文合成首先是報文合成,根據(jù)報文格式,我們需要發(fā)送的報文除了包含
2021-08-26 20:33:25
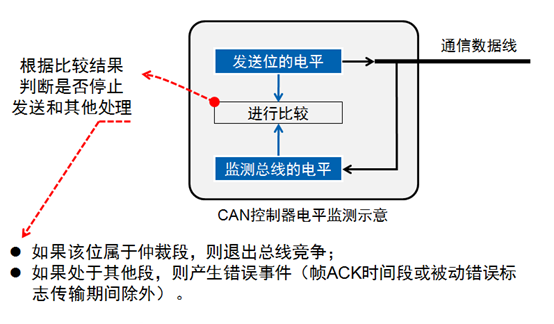
1、CAN報文發(fā)送流程 報文發(fā)送 節(jié)點發(fā)送要檢測到總線空閑狀態(tài)(連續(xù)11位隱性) 。 只有總線空閑時節(jié)點才能發(fā)送報文 在發(fā)送過程中進行回讀,判斷發(fā)出的位和回讀的位是否一致。 報文仲裁 線
2022-10-31 16:58:09
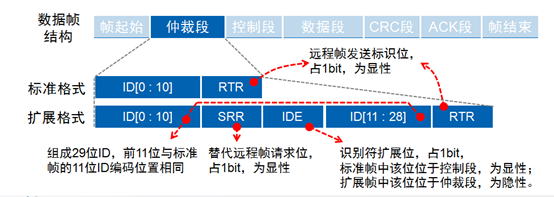
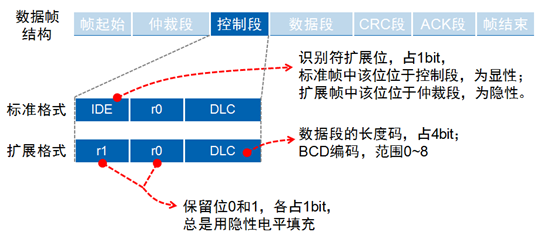
什么是標準格式CAN和擴展格式CAN?標準CAN的標志符長度是11位,而擴展格式CAN的標志符長度可達29位。CAN 協(xié)議的2.0A版本規(guī)定CAN控制器必須有一個11位的標志符。同時,在2.0B
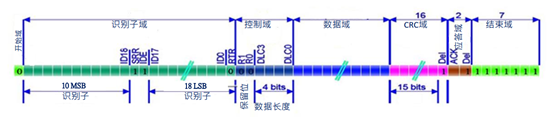
2008-10-27 13:08:016330 CAN-bus總線是應用最廣泛的現(xiàn)場總線之一,而很多非常熟練的CAN工程師,面對一條CAN報文到底有多少位的問題時,卻不能非常準確地回答。今天我們就從最基本的幀格式來解惑一條CAN報文的到底有多少位。
2017-06-06 16:36:2932852 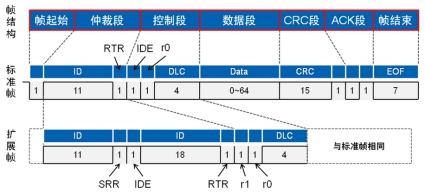
CAN總線調試過程中出現(xiàn)報文發(fā)送失敗,很多工程師都對此只知其一不知其二,這里就CAN報文發(fā)送失敗的問題我們來做一次探討。在了解CAN報文為什么會發(fā)送失敗之前我們先看看一條正確的CAN報文到底應該是怎么樣的,表1是一個正常標準數(shù)據(jù)幀的報文組成。
2017-07-19 18:47:0618793 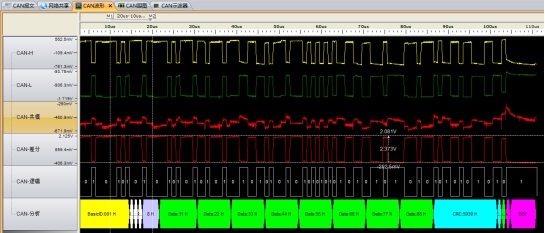
當CAN總線上的一個節(jié)點(站)發(fā)送數(shù)據(jù)時,它以報文形式廣播給網(wǎng)絡中所有節(jié)點。對每個節(jié)點來說,無論數(shù)據(jù)是否是發(fā)給自己的,都對其進行接收。每組報文開頭的n位字符為標識符(擴展幀格式為29位),定義了報文
2017-11-21 16:39:47 0
0 明顯的區(qū)別。 當CAN總線上的一個節(jié)點(站)發(fā)送數(shù)據(jù)時,它以報文形式廣播給網(wǎng)絡中所有節(jié)點。對每個節(jié)點來說,無論數(shù)據(jù)是否是發(fā)給自己的,都對其進行接收。每組報文開頭的11位字符為標識符,定義了報文的優(yōu)先級,這種報文格式稱為面向內容的編址方案。在
2017-12-07 10:25:5426 TCP(Transmission ControProtocol)傳輸控制協(xié)議是一種面向連接的、可靠的、基于字節(jié)流的傳輸層協(xié)議。TCP報文是TCP層傳輸?shù)臄?shù)據(jù)單元,也稱為報文段。
2017-12-08 11:11:5331538 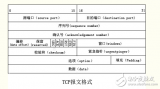
CAN協(xié)議教程 介紹:CAN總線 CAN總線是廣播類型的總線。這意味著所有節(jié)點都可以偵聽到所有傳輸?shù)?b class="flag-6" style="color: red">報文。無法將報文單獨發(fā)送給指定節(jié)點;所有節(jié)點都將始終捕獲所有報文。但是,CAN硬件能夠提供本地過濾
2020-04-03 15:32:2213573 CAN總線的報文是怎么產(chǎn)生以及收發(fā)的,遇到通訊異常的問題時從什么角度分析?這篇文章將會帶您快速了解報文的傳輸原理。
2020-12-26 02:46:471469 報文聚類是報文格式推斷的基礎,現(xiàn)有的報文聚類方法大多以報文的全局相似性為聚類的標準,這類聚類方法的準確率往往不高,進而影響后續(xù)報文格式提取的準確率。針對這一冋題,文中提岀了一種基于粗糙集
2021-04-25 11:45:173 在上一篇文章,直接在本地搭建了服務器和客戶端,簡單的實踐了MQTT的用法。而這一篇來解析MQTT的報文格式。MQTT的報文字段很精簡。但是解析起來還是有些復雜的。 解析報文最好的工具是采用
2021-05-13 14:06:584272 
目錄:一、CAN通信原理1.CAN通信簡介2.CAN通信優(yōu)點3.CAN總線物理層4.CAN報文種類5.數(shù)據(jù)幀格式6.仲裁過程7.位同步二、STM32的CAN控制器1.功能特點2.STM32CAN架構
2021-11-19 12:21:0884 發(fā)送的優(yōu)先級要求(優(yōu)先級特性可軟件配置)。對于安全緊要的應用,bxCAN提供所有支持時間觸發(fā)通信模式所需的硬件功能。2 CAN--2.0A和2.0B:CAN2.0A為標準格式,CAN2.0B為擴展格式,報文標識符可達2032種(CAN2.0A—11位ID),而擴展標準(CAN2.0B—29位ID)的報
2021-12-04 18:21:1010 物理特性 14.1.6 CAN報文幀 14.1.6.1 CAN報文格式 14.1.6.2 CAN報文幀類型 14.2 CAN編程框架創(chuàng)建 14.3 STM32 CAN應用編程 14.3.1 STM32
2021-12-10 19:29:44692 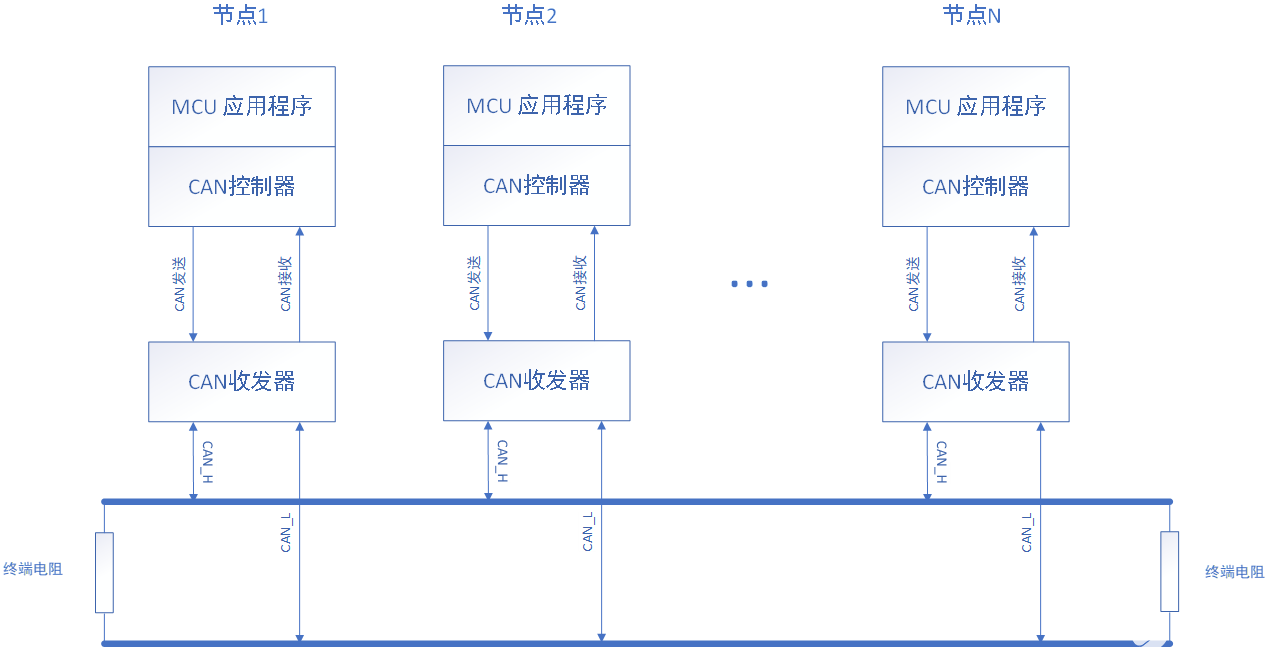
在調試程序的時候,我們可以通過CAN報文把一些關鍵變量的值輸出,來觀察程序的運行狀態(tài),下面我們就來看一下如何輸出CAN報文,并在發(fā)送成功后,觸發(fā)一個CAN中斷。1.首先要包含CAN驅動頭文件
2021-12-28 19:14:2113 CAN總線上傳輸?shù)男畔⒎Q為報文,當總線空閑時任何連接的單元都可以開始發(fā)送新的報文。
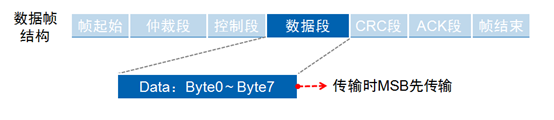
2022-10-17 15:09:493179 每個CAN報文只有8字節(jié),當節(jié)點需要發(fā)送較大的數(shù)據(jù)報文時很容易受限,所以要傳輸大于8字節(jié)數(shù)據(jù)時,就要進行分包傳輸。
2022-10-25 11:18:172989 在詳解CAN總線:CAN總線報文格式—數(shù)據(jù)幀文章中,講解到仲裁段。仲裁段用于寫明需要發(fā)送到目的CAN節(jié)點的地址、確定發(fā)送的幀類型(當前發(fā)送的是數(shù)據(jù)幀還是遙控幀),并確定發(fā)送的幀格式是標準幀還是擴展幀。
2022-10-25 14:00:181727 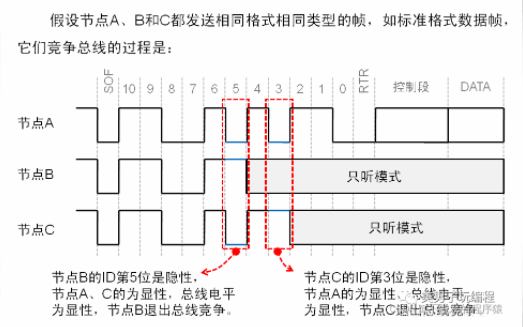
在COM模塊中,周期報文通過Com_MainFunctionTx周期調度函數(shù)發(fā)送,事件觸發(fā)型報文通過Com_TriggerIPDUSend通信服務接口發(fā)送。無論是Com_MainFunctionTx
2022-11-14 10:02:218836 降低同一時刻,多個發(fā)送報文的Burst Send問題。這個問題屬于QA1的延申。一個節(jié)點,發(fā)送的報文類型可以有多種(QA1提到)。
2022-11-15 14:34:495341 
表1中,字節(jié)0為ECU Address,作為源節(jié)點標識符,用 以告知其他節(jié)點該報文是由哪個節(jié)點發(fā)送的;處于CAN網(wǎng) 絡中的每個節(jié)點都會分配一個唯一的標識符,本文中網(wǎng)絡 管理報文的ECU
2022-11-17 11:05:062805 Unexpected N_PDU的處理只適用于相同N_AI的診斷報文。Classical CAN和CAN FD的N_AI本就不同,所以,互不干擾,可以并行處理;單個Message中不要混用Classical CAN和CAN FD。
2022-12-05 10:06:20904 PLC以通訊方式控制變頻器正反轉為例進行說明;在通訊參數(shù)都設置好之后,需要先斷一下電,這樣設置的參數(shù)才會生效,下面就是PLC要發(fā)送報文給變頻器了。
2023-02-03 09:09:151910 來
實現(xiàn)。
因此引入了第二種報文格式(‘擴展格式’)的概念,其定義的地址范圍更寬,由 29 位定義。系統(tǒng)設計
者將從考慮定義良好的結構命名方案中得到解放。有的用戶不需要由擴展格式提供的識別符范圍,可以繼
續(xù)沿用常規(guī)的 11 位識別符范圍(
2023-04-17 09:36:520 UDP用來支持那些需要在計算機之間傳輸數(shù)據(jù)的網(wǎng)絡應用。包括網(wǎng)絡視頻會議系統(tǒng)在內的眾多的客戶/服務器模式的網(wǎng)絡應用都需要使用UDP協(xié)議。
2023-05-06 15:26:382619 
Modbus通信方式與分類
- 串口 RS485(一主多從):不同的報文格式:ModbusAscii(ASCII字符方式進行發(fā)送)、ModbusRTU(Remote Terminal Unit
2023-05-10 10:32:373 在CAN總線通信的應用領域中,很多客戶需要將CANID 放在CAN報文中,這樣更方便接入不同的設備,有利于用戶通過模塊更方便的組建自己的網(wǎng)絡,使用自定的應用協(xié)議。但是要實現(xiàn)這樣的應用,用戶往往需要
2023-05-12 10:40:32571 
事務描述符是一種在請求方和完成方之間攜帶事務信息的機制。通過事務描述符TL層才知道要如何處理這些報文。在整個事務描述符由三個字段組成:
2023-05-22 17:32:152976 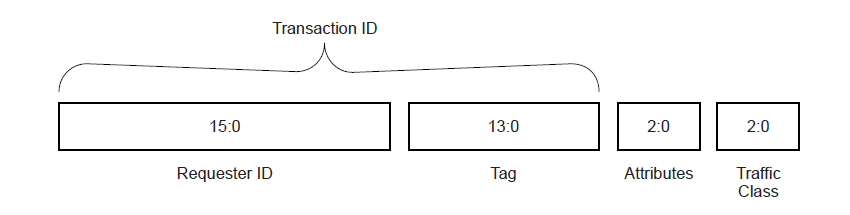
CAN芯片將數(shù)據(jù)根據(jù)協(xié)議組織成一定的報文格式發(fā)出,這時網(wǎng)上的其它站處于接收狀態(tài)。每個處于接收狀態(tài)的站對接收到的報文進行檢測,判斷這些報文是否是發(fā)給自己的,以確定是否接收它。
2023-06-16 12:50:401614 
MATLAB函數(shù)進行CAN報文發(fā)送,詳細請看下文。操作步驟1.安裝PEAK驅動(此處不詳細展開,請點擊左下角“閱讀原文”了解詳細)2.安裝VehicleNetwo
2022-01-10 11:45:034236 
我們知道CANFD比CAN擁有更長的數(shù)據(jù)長度(最長64字節(jié)),更高的波特率(8Mbps甚至更高)。那么波特率更高,數(shù)據(jù)更長的CANFD,一秒鐘最高可以發(fā)送多少幀CANFD報文呢?我們知道CANFD
2022-07-29 09:34:391319 
//CANopen是位于CAN總線之上的應用層協(xié)議。CAN報文由7個不同的位域組成,CANopen主要是規(guī)定了其中的仲裁域和數(shù)據(jù)域的使用情況。01CANopen報文格式CANopen的報文格式
2022-08-10 09:21:051478 
在CAN總線通信的應用領域中,很多客戶需要將CANID放在CAN報文中,這樣更方便接入不同的設備,有利于用戶通過模塊更方便的組建自己的網(wǎng)絡,使用自定的應用協(xié)議。但是要實現(xiàn)這樣的應用,用戶往往需要
2023-05-15 10:30:53451 
一幀CAN FD報文位數(shù) 根據(jù)CAN FD幀結構組成,可以算出一幀CAN FD報文位數(shù): CAN FD報文位數(shù) = 幀起始(1位)+ 仲裁段(13/32位)+ 控制段(8位)+ 數(shù)據(jù)段(0~512
2023-07-18 10:48:184559 1us),數(shù)據(jù)域波特率為5Mbps(位時間200ns)時,其報文時間 = 1us * 26 + 33 * 200ns = 32.6us。 那么一秒鐘最多可以發(fā)送報文呢?由于報文發(fā)送成功后,需經(jīng)過幀間隔(3個位)后才能發(fā)送下一幀報文,也就說仲裁段要在原來基礎上加3個位,就可以算出每秒發(fā)送多少幀了。那么上述
2023-07-18 10:49:421456 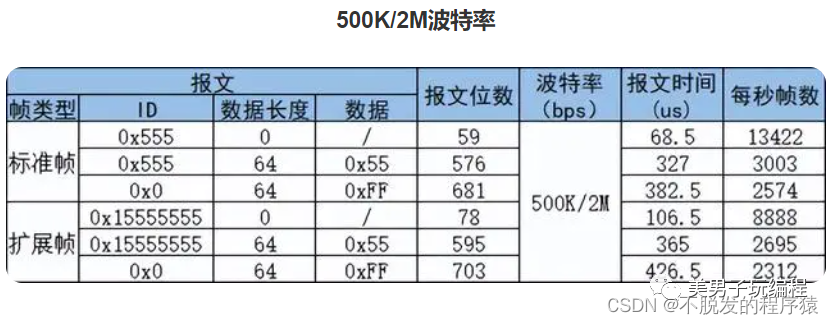
Pdelay_Req報文格式定義 如下圖15所示為IEEE802.1AS定義的報文格式定義: 圖15 Pdelay_Req報文格式定義 上圖中header與SYNCMessage頭信息定義
2023-07-24 10:45:45664 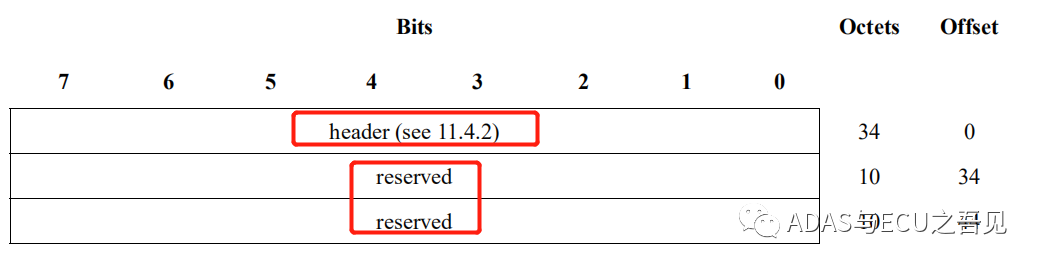
Version版本 4Bit :ip報文中,用來表示該協(xié)議采用的是那一個版本的ip,相同版本的ip才能進行通信。一般此處的值為4,表示ipv4。
2023-12-13 09:43:52721 
支持點對點和多點通信,可以實現(xiàn)控制器之間的通信。 Modbus報文是Modbus協(xié)議中的基本通信單位。Modbus報文包含一個頭部和數(shù)據(jù)部分。頭部包含了從站地址、功能碼和數(shù)據(jù)長度等信息,數(shù)據(jù)部分包含了請求或響應數(shù)據(jù)。 ? 1. 地址碼(Address Code):指定通信對象的地址,通常
2024-01-09 16:45:032871 控制以及其他分布式控制系統(tǒng)中的現(xiàn)場總線標準之一。CAN協(xié)議在設計時注重實時性能、錯誤檢測與恢復機制以及網(wǎng)絡節(jié)點間的高效通信。在CAN2.0規(guī)范中,主要有2種報文格式
2024-03-29 08:19:58243 怎么樣的。表1是一幀正常標準數(shù)據(jù)幀的報文組成。表1標準數(shù)據(jù)幀報文格式組成圖1標準數(shù)據(jù)幀格式CAN總線是一種基于廣播的通訊方式,為了保證總線上的每一個正常節(jié)點都能正
2024-04-12 08:25:1934
 電子發(fā)燒友App
電子發(fā)燒友App














 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論