針對溫度控制而設計的FB58(TCONT_CP)簡析
特 點:具備溫度信號轉換的功能,帶自整定功能,同時具備模擬量輸出和PWM輸出方式,兩步控制方式,比例....
基于以太網的PC Station與S7-1200進行通信
在第一個槽中,從“用戶應用程序”,選擇“OPC服務器”添加一個OPC Sever 的應用。
在第三....
Simatic Net PC軟件的S7 OPC通信服務功能
Simatic Net PC軟件的S7 OPC通信服務是該軟件最常用的功能,用于具備OPC客戶端功能....
如何去實現S7-1500從站的激活與取消激活
當D_ACT_DP指令的輸入參數 MODE=1或MODE=2 時,RET_VAL輸出指令運行時的故障....
用戶定義數據類型的結構
用戶定義數據類型(UDTs)是你自己創建的特殊數據結構。因用戶數據類型指派了名字,他們可以用很多次。....
FESTO模塊配置
通過現場總線實現非環參數訪問,通過以太網實現非環數據訪問,快速啟動 (FSU),通過現場總線實現通道....
通過PROFINET進行電源管理
借助CapCtrl.xml 進行的工業以太網接口配置不是PROFIenergy的函數并且必須分開考慮....
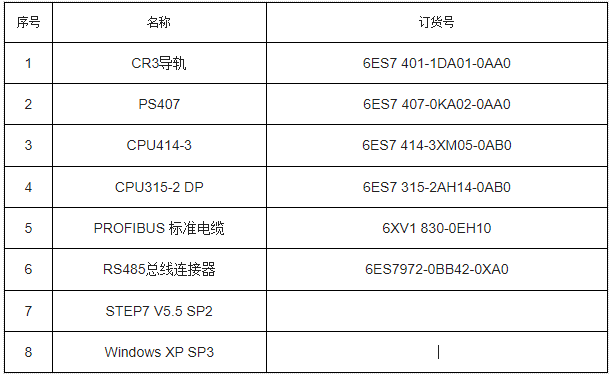
S7-400基于PROFIBUS總線的S7單邊通信
2.?組態 2.1配置S7-400站點 S7-400站點配置參見表2。 序號 說明 圖示 1.???....
FESTO焊鉗故障報警分析
這次焊鉗的氣管接錯,沒有造成焊鉗故障報警,但是在焊鉗進行夾緊時出現卡頓現象.在作機器人E1軸移動時報....
針對機器人負荷情況如何偏量學習
所有機器人的零點標定位置都是相似的,但不盡相同。精確位置在同一機器人型號的不同機器人之間也會有所不同....
KUKA用KRC瀏覽器在線工作
僅在 編程和診斷 工作區域內: "Programming and diagnosis " 將 Wor....
KUKA機器人系統函數
功能 INVERSE 從一個笛卡爾位置用附加軸角度計算合適的機器人軸角度。在此不必為笛卡爾位置指定狀....
KUKA機器人高級編程- 全局變量的應用舉例
PUBLIC 只用于在此所述的用途,即在數 據列表中與 GLOBAL 確定的數據對象一起使其全局可用....
KUKA機器人程序中銑削清零方式
KUKA機器人程序中銑削清零方式: ????? ;FOLD?bin3 ( !F329 ) = 1 ?....
關于PLC的組態文件
程序中的系統數據指的是PLC的組態文件 系統數據塊(SDB)由各種應用程序創建,有時甚至由CPU自行....
關于PROFIBUS 配置
PROFIBUS 配置 KEB 上的 PROFIBUS(KUKA 擴展總線) 擴展總線被插入到 Wo....
S7-400基于PROFIBUS總線的S7單邊通信的組態步驟
S7協議是SIEMENS S7系列產品之間通訊使用的標準協議 ,其優點是通信雙方無論是在同一MPI總....
KUKA擴展總線的PROFIBUS配置分析
使用搜索功能 (2) 在 DTM 目錄 (3) 中找到 PB I/O 模塊,然后雙擊將其分配給空閑插....
如何診斷PROFIBUS DP通信的中斷問題
① 檢查至 DP 主站的總線電纜是否斷開,主站是否上電??梢酝ㄟ^測量電阻阻值的方法判斷DP電纜的通斷....
STEP 7 Safety V17 指令-CMP
輸入指令上方操作數占位符中的第一個比較值(< 操作數 1>)。輸入指令下方操作數占位符中的第二個比較....
機器人關于A577先導閥問題
機器人在手動執行使時, 順序塊在原位,程序中斷,所以在手動時不執行程序驅動向前時,是不會有A277的....
TIA Portal Openness V13 SP1安裝程序
安裝程序會自動安裝“TIA Portal Openness V13 SP1”附加軟件包。
趨勢視圖的布局
趨勢視圖是一種動態顯示對象。 如果HMI 設備支持,趨勢視圖可以持續顯示實際的過程數據和記錄中的過....
KUKA機器人的負載電壓US1和US2選項
當接口帶負載電壓 US1/US2 時,負載電壓US1 未接,US2 通過安全技術連接,由此可在驅動裝....
機器人關于RIP的程序代碼設計
當使用 F819時 MIT_VW_WASS(水控制單元)將被激活, 控制A513 開水,或A515關....





 工商網監
工商網監