 人都分不好垃圾,機器能分好嗎?
人都分不好垃圾,機器能分好嗎?
讓垃圾自動分類
近期垃圾分類成為了一個熱門話題,原來直接一次性扔掉的垃圾,現在都需要分門別類進行投放。從今年7月1日起,新的《上海市生活垃圾管理條例》正式開始施行,號稱史上最嚴的垃圾分類就要來了。我們以后在扔垃圾前都要先將垃圾仔細分成可回收物、有害垃圾、濕垃圾和干垃圾四個類別,如果分錯還會被罰款。
垃圾分類可以更好地保護我們的環境衛生,為了讓大家能夠正確對垃圾進行分類,官方發布了垃圾分類指南,列舉了每種類別對應的常見垃圾,大家可以對照著進行分類投放。此外,腦洞大開的網友們也另辟蹊徑,提供了各種有意思的分類思路。
在日常生活中,每個類別的垃圾往往包含了各式各樣的內容,人們在分類投放的時候難免會出現偏差,這個時候如果有一個分類神器對垃圾拍個照就能告訴我們是什么類別就好了。
當前人工智能飛速發展,我們能否利用AI技術來對垃圾自動分類,實現上面提到的設想呢?為了回答這個問題,在今天的文章中,我們將從人工智能的角度出發,嘗試利用深度學習技術來構建一個垃圾自動分類器,同時也會進一步介紹AI垃圾分類遇到的挑戰和一些思考。
“垃圾”圖像數據準備
為了實現一個理想的垃圾自動分類器,需要有一個已經分好類別的“垃圾”圖像數據集作為訓練的基礎。然而當前并沒有這樣一個可以直接使用的數據集,所以我們首先自己動手收集海量的“垃圾”圖像并為每張圖像標注上相應的類別。
數據集的收集一直是一件耗時耗力的工作,為了快速便捷地完成“垃圾”圖像數據集的收集,我們依據官方發布的垃圾分類指南上每一類所包含的垃圾名稱,通過在百度圖片上爬取名稱對應的圖像來實現。官方發布的垃圾分類指南如下圖所示。
在實際的應用場景中,待分類的樣本往往是不可控的,所以一般會增加“其他”這個類別用來收留各種異常樣本。在垃圾分類中,除可回收物、有害垃圾和濕垃圾外都屬于干垃圾,所以干垃圾已經扮演了“其他”的角色。我們的“垃圾”圖像數據集最終分為可回收垃圾、有害垃圾、濕垃圾和干垃圾四個類別。數據集的部分圖像如下圖所示。
垃圾自動分類器
垃圾自動分類本質上是一個圖像分類問題,當前基于深度卷積神經網絡的圖像分類算法發展很快,各種方法層出不窮。下面我們先回顧這些分類網絡的演進思路,再進一步將分類算法應用于垃圾分類,介紹構建一個垃圾自動分類器的流程和細節。
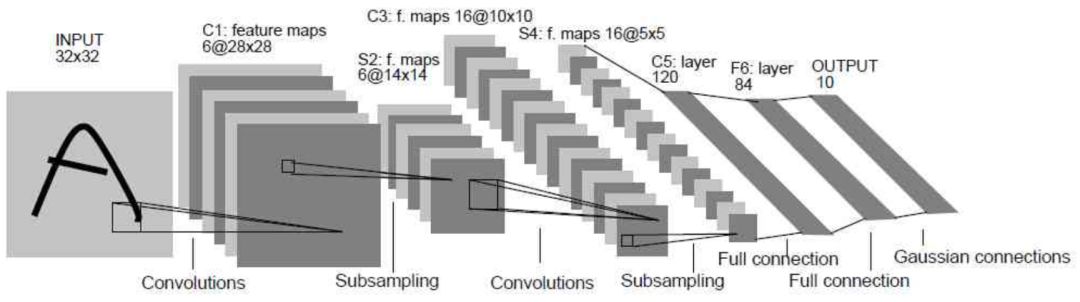
卷積神經網絡的開山之作LeNet于1998年被提出,并成功應用于手寫體識別。LeNet和現在的網絡結構相比雖然簡單(如上圖所示),但是卷積層、池化層和全連接層這些基本模塊都已經具備。
隨著ReLU和dropout的提出,以及GPU和大規模數據集的出現,卷積神經網絡在2012年迎來了歷史突破,AlexNet的出現讓卷積神經網絡開始逐漸成為計算機視覺任務的標配。在AlexNet的基礎上,以增加網絡深度為思路,出現了VGGNet;以增強卷積模塊為思路,出現了基于Inception的一系列網絡。
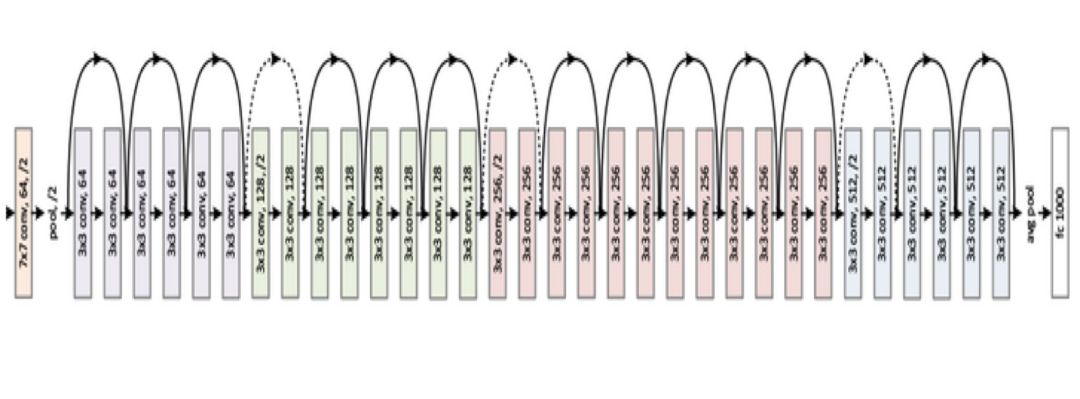
隨著后來居上的ResNet的提出,層數極深的網絡成為了可能。通過引入殘差模塊,緩解了深度網絡訓練過程中的梯度消失問題,讓網絡的深度不斷加大,網絡性能也得到了大幅提升。之后的DenseNet更是通過對特征圖的稠密連接,加強了特征的傳遞,繼續提升分類效果。當前ResNet及其變種形式已經被廣泛地應用于圖像分類任務,同時也成為了在解決目標檢測和圖像分割等其他計算機視覺問題時常用的主干網絡結構。
在本文中,我們使用50層的ResNet來構建垃圾自動分類器。具體我們采用在ImageNet數據集上預訓練的ResNet50模型參數作為初始化,利用上一節中收集的“垃圾”圖像數據集對其進行微調。
其中我們將上述ResNet50的最后一層輸出從1000(ImageNet數據集的分類數量)修改為4(垃圾分類數量),同時在訓練過程中凍結了部分卷積層參數的更新。此外還進一步利用水平翻轉、隨機裁剪和色彩抖動等方式對訓練的“垃圾”圖像進行數據增強。在完成垃圾自動分類器的訓練后,我們對一些垃圾進行了自動分類的測試,準確率達到近90%。雖然對復雜的情況還是存在一定的誤判,但大部分常見的垃圾都得到了正確的區分,具有較強的實用性。
從單個垃圾分類到一群垃圾分類
上一節中我們介紹了垃圾自動分類器的構建,但是這樣的垃圾分類器的輸入都是單個垃圾圖像。在實際的垃圾分類投放過程中,對單個的垃圾進行一一拍照分類顯得過于繁瑣和緩慢。那能不能對一群垃圾直接拍照后進行批量分類呢?要實現對一群垃圾的批量分類,其實就是要構建一個垃圾的目標檢測器。輸入一張含有多個垃圾的圖像,讓模型輸出圖像上每種垃圾對應的類別。
在深度學習出現之前,可變形部件模型(DPM)一直是流行的目標檢測方法。深度學習出現后,以R-CNN、Fast R-CNN、Faster R-CNN為代表的兩階段算法和以YOLOv1-3、SSD、RetinaNet為代表的單階段算法成為主流。前者是先由算法生成一系列待檢測目標的候選框,再通過卷積神經網絡進行候選框的分類;后者則不用產生候選框,直接將目標邊框定位的問題轉化為回歸問題處理。
和垃圾分類器一樣,一個理想的垃圾檢測器,需要大量的“垃圾”標注數據來支撐。但是與分類數據集相比,檢測數據集除了標注類別外還要標注圖位置坐標,這樣的標注工作更為艱巨。在完成垃圾檢測的圖像數據集后,就可以利用當前主流的深度學習檢測算法來實現批量垃圾的分類。
寫在最后
垃圾分類最近成為了大家生活中經常討論的話題,這篇文章分享了如何利用深度學習技術來構建一個垃圾自動分類器,也進一步介紹了從單個垃圾分類到批量垃圾分類的思路和挑戰。
在實際的垃圾分類中,由于垃圾多種多樣,同一類別的垃圾可能差異很大,而不同類別的垃圾可能差異很小,在復雜情況下分類器效果可能會不盡如人意,后續可以考慮加入垃圾之間的高層次語義關系信息,進一步提升分類器的性能。最后希望大家都能做到正確的垃圾分類投放,畢竟生活不易,還是不要被罰款。
-
圖像
+關注
關注
2文章
1092瀏覽量
41035 -
人工智能
+關注
關注
1804文章
48734瀏覽量
246651 -
機器
+關注
關注
0文章
790瀏覽量
41136
原文標題:上海居民被垃圾分類逼瘋!這款垃圾自動分類器也許能幫上忙
文章出處:【微信號:rgznai100,微信公眾號:rgznai100】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
橋接智能制造:PROFINET與Devicenet混合架構賦能汽車擦凈機器人升級






 工商網監
工商網監
評論