") 自動(dòng)駕駛 | 寶馬如何借助深度學(xué)習(xí)開發(fā)ADAS和自動(dòng)駕駛
自動(dòng)駕駛 | 寶馬如何借助深度學(xué)習(xí)開發(fā)ADAS和自動(dòng)駕駛
寶馬集團(tuán)自動(dòng)駕駛研發(fā)中心成立于2017年,位于德國(guó)慕尼黑下施萊斯海姆(Unterschlei?heim),擁有約1400名雇員(含合作伙伴),涵蓋傳感器處理、數(shù)據(jù)分析、機(jī)器學(xué)習(xí)、駕駛策略、硬件架構(gòu)等領(lǐng)域的合作伙伴。
目前該研究中心有有81個(gè)課題組,30位博士。寶馬自動(dòng)駕駛研究車隊(duì)有85輛車,每車每小時(shí)采集2T的數(shù)據(jù)。
1,自動(dòng)駕駛深度學(xué)習(xí)應(yīng)用設(shè)計(jì)流程
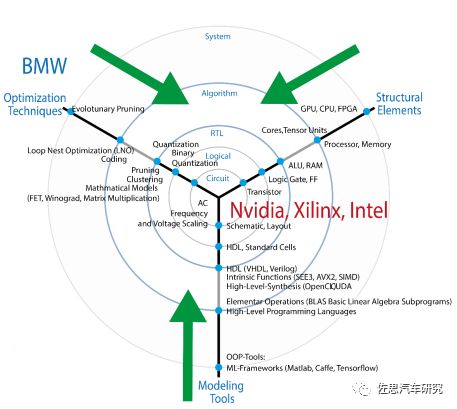
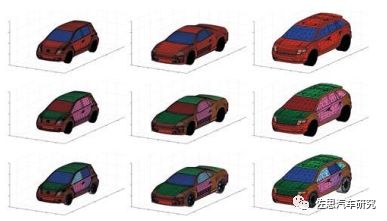
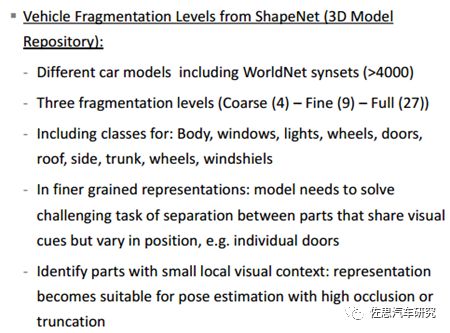
2,精細(xì)化的自動(dòng)駕駛車輛表示
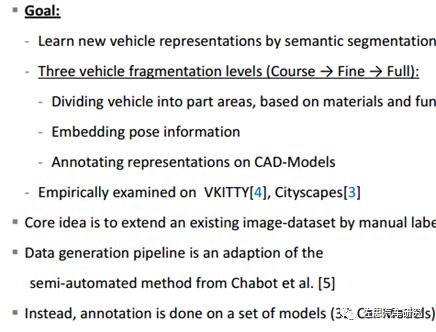
3,精細(xì)化自動(dòng)駕駛車輛表示——目標(biāo)
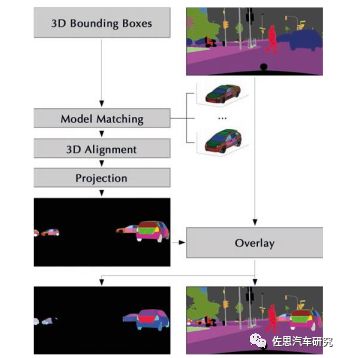
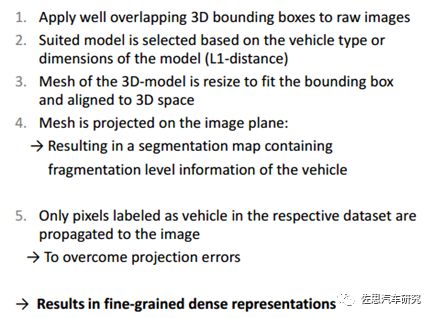
4,半自動(dòng)標(biāo)記流程
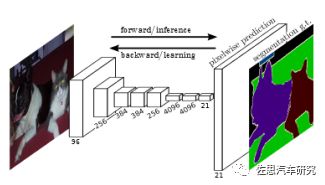
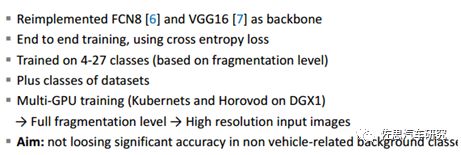
5,全卷積神經(jīng)網(wǎng)絡(luò)(FCN)模型探索
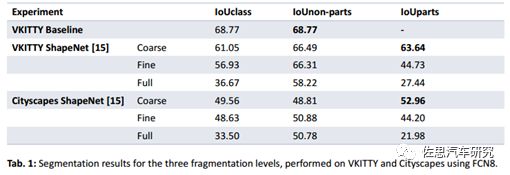
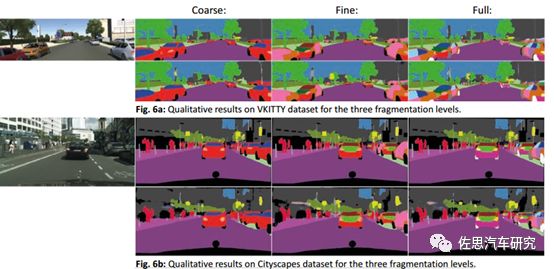
6,F(xiàn)CN模型探索——VKITTY和Cityscapes數(shù)據(jù)集
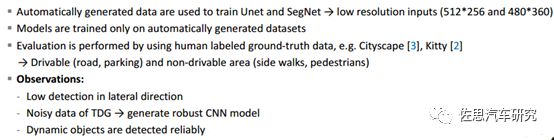
7,自動(dòng)駕駛可行駛區(qū)域自監(jiān)督學(xué)習(xí)
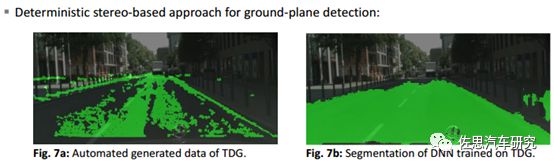
8,為什么需要地面檢測(cè)
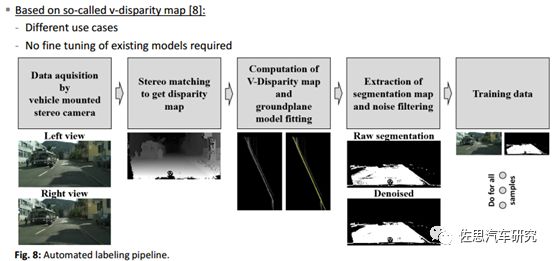
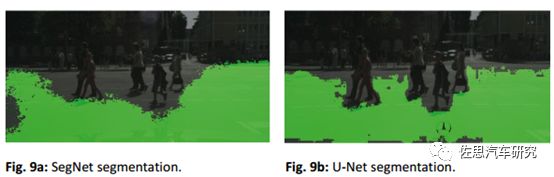
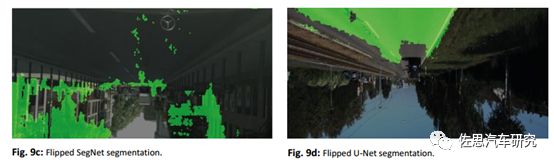
9,自動(dòng)標(biāo)記流程
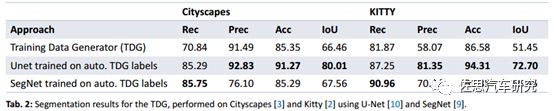
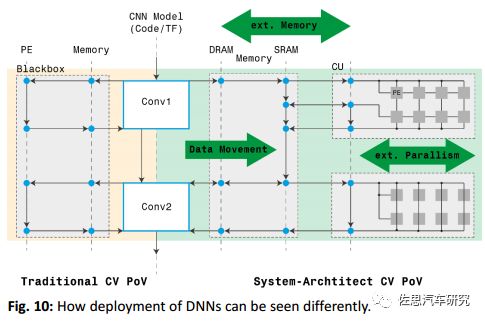
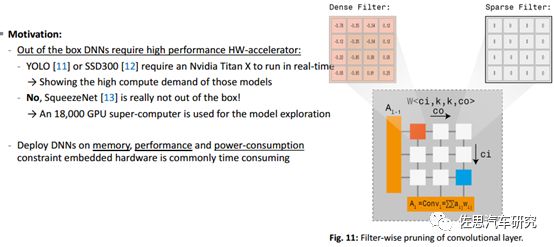
10,卷積神經(jīng)網(wǎng)絡(luò)(CNN)模型探索

11,自動(dòng)駕駛CNN優(yōu)化技術(shù)
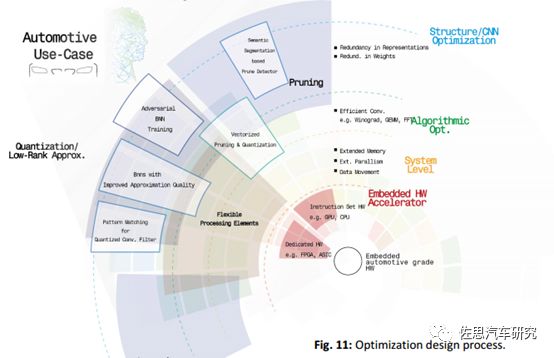
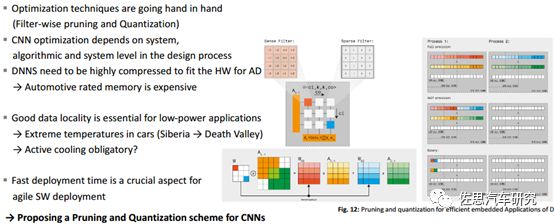
12,CNN優(yōu)化設(shè)計(jì)流程
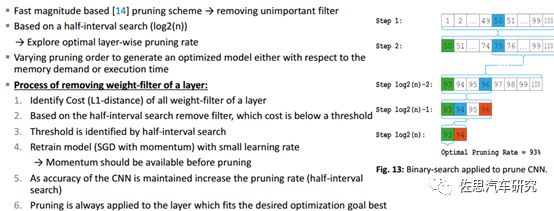
13,資源感知多準(zhǔn)則優(yōu)化
14,為什么需要資源感知多準(zhǔn)則優(yōu)化
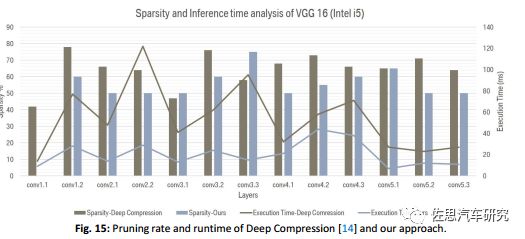
15,資源感知多準(zhǔn)則優(yōu)化方法——剪枝
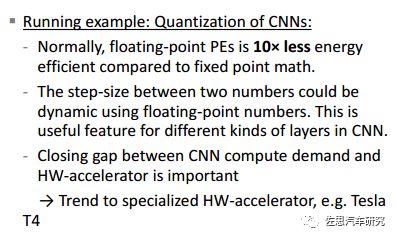
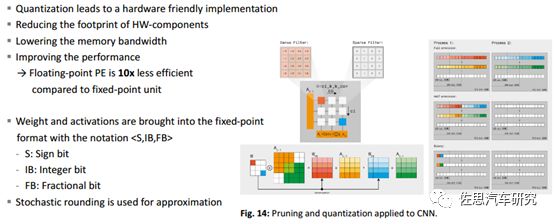
16,資源感知多準(zhǔn)則優(yōu)化方法——量化
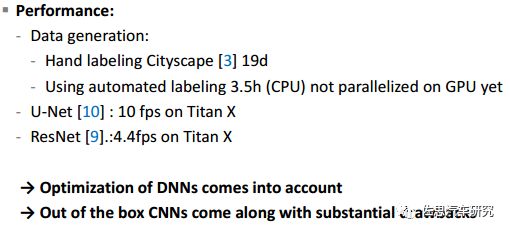
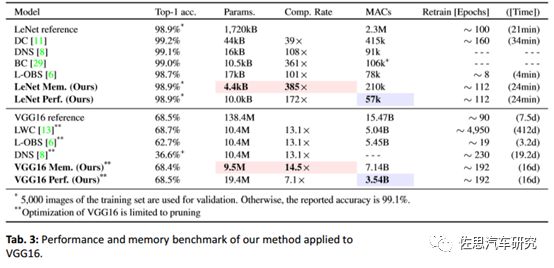
17,內(nèi)存和性能基準(zhǔn)

-
寶馬
+關(guān)注
關(guān)注
7文章
771瀏覽量
32949 -
自動(dòng)駕駛
+關(guān)注
關(guān)注
788文章
14193瀏覽量
169498 -
深度學(xué)習(xí)
+關(guān)注
關(guān)注
73文章
5554瀏覽量
122474
原文標(biāo)題:寶馬如何借助深度學(xué)習(xí)開發(fā)ADAS和自動(dòng)駕駛
文章出處:【微信號(hào):zuosiqiche,微信公眾號(hào):佐思汽車研究】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
新能源車軟件單元測(cè)試深度解析:自動(dòng)駕駛系統(tǒng)視角

劉強(qiáng)東,進(jìn)軍汽車領(lǐng)域# 京東# 自動(dòng)駕駛# 自動(dòng)駕駛出租車# 京東自動(dòng)駕駛快遞車

什么是自動(dòng)駕駛場(chǎng)景仿真軟件——VTD(Virtial Test Drive)?#ADAS #智能駕駛

自動(dòng)駕駛汽車安全嗎?


自動(dòng)駕駛HiL測(cè)試方案案例分析--ADS HiL測(cè)試系統(tǒng)#ADAS #自動(dòng)駕駛 #VTHiL

自動(dòng)駕駛HiL測(cè)試方案——攝像頭仿真之視頻注入#ADAS #自動(dòng)駕駛 #VTHiL

自動(dòng)駕駛HiL測(cè)試方案 ——場(chǎng)景仿真3D演示#ADAS #自動(dòng)駕駛 #VTHiL

自動(dòng)駕駛HiL測(cè)試方案介紹#ADAS #自動(dòng)駕駛 #VTHiL






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論