 如何基于深度神經網絡設計一個端到端的自動駕駛模型?
如何基于深度神經網絡設計一個端到端的自動駕駛模型?
如何基于深度神經網絡設計一個端到端的自動駕駛模型?如何設計一個基于增強學習的自動駕駛決策系統?簡述算法設計思路。
【問題1】
如何基于深度神經網絡
設計一個端到端的自動駕駛模型?
分析與解答
本題屬于開放性設計題,回答者需要了解自動駕駛模型的基本功能和研發中涉及到的主要問題,并結合深度學習領域的相關知識給出設計方案。
自動駕駛模型是自動駕駛系統的重要組成部分,其在功能上試圖模仿人類司機,通過給定當前的車輛狀態和周圍環境信息,輸出為對車輛控制信號。傳統的駕駛模型設計方法人為地將自動駕駛任務分解成車道識別、場景抽象、路徑規劃和控制決策等多個子任務,然后再根據各個子任務的輸出,通過人工定義的規則來控制汽車的前進;而通過建立從輸入信號到輸出信號的端到端模型,可以
無需引入大量的人工規則來控制汽車的行駛;
使整個自動駕駛系統的結構更加簡單、高效;
使模型自主地學到人沒有指定的子任務。
而對于端到端駕駛模型的具體設計,這里介紹業界較有影響力的工作——Nivdia于2016年提出的PilotNet模型以供參考。
PilotNet模型是一個端到端的深度神經網絡,可以在自動駕駛系統中控制車輛前進的方向。模型根據安裝在汽車擋風玻璃前的三個攝像頭采集到的原始圖片,通過深度神經網絡學習出汽車前進所需要轉動的角度。其整體架構如 Fig. 2 所示 [3]。
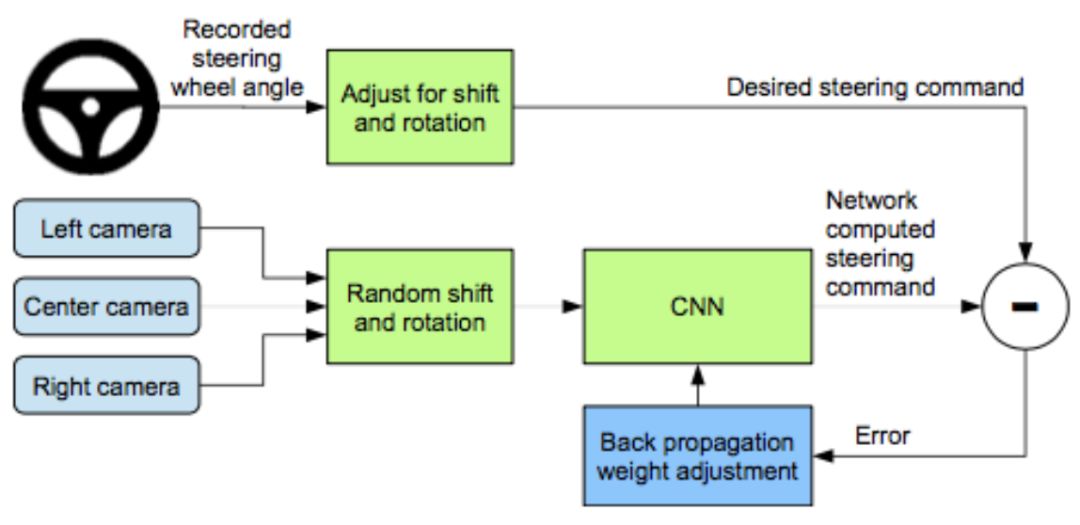
Figure 1:Nivdia端到端的自動駕駛系統
PilotNet是一個9層神經網絡,由1個歸一化層(Normalization Layer)、5個卷積層(Convolutional Layer)和3個全連接層(Fully Connected Layer)組成,如 fig. 3 [4] 所示。模型的輸入為映射到YUV平面的原始輸入圖像,輸出為車輛前進需要偏轉的方向。網絡的前三個卷積層采用5*5的卷積核,后兩個卷積層采用3*3的卷積核。訓練數據包含在不同類型道路上(高速公路、住宅區的街道、鄉間小路等)、不同光線強度、不同天氣條件下的真實的汽車行駛過程中收集到的視頻采樣圖片。
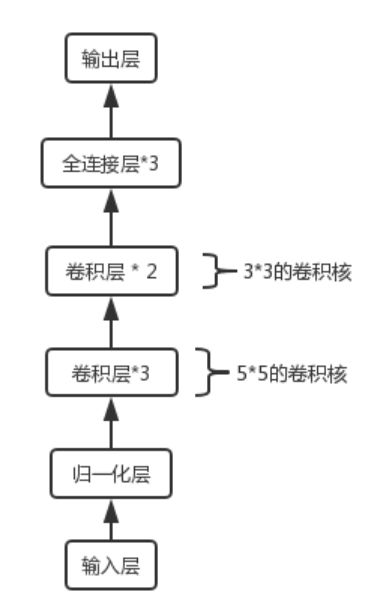
Figure 2: PilotNet網絡結構圖
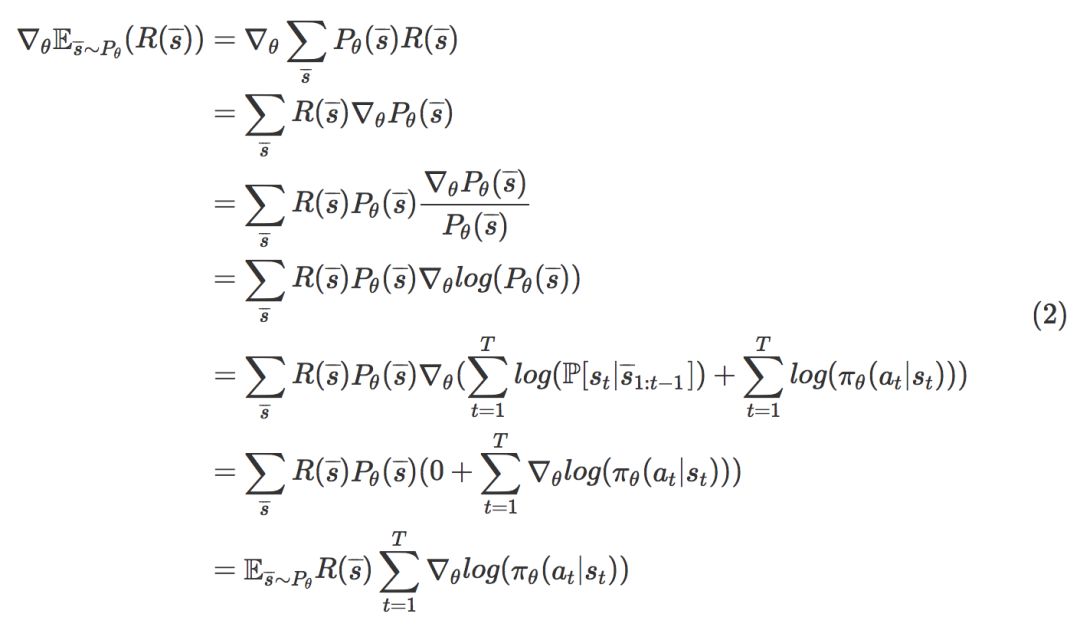
PilotNet在模擬仿真和實際路測均取得較好的實驗結果。實驗中定義車輛自動化程度為評測指標,即:
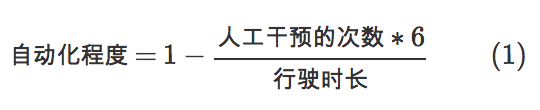
模擬系統中車輛偏離道路中心線超過一米時會發生一次人工干預,并假設人工干預平均需要消耗的時間約為6s/次。PilotNet模型在仿真系統上的評測結果為90%,路測指標可以達到98%。
【問題2】
如何設計一個基于增強學習的自動駕駛決策系統?
簡述算法設計思路
分析與解答
傳統的自動駕駛決策系統多數采用人工定義的規則,但是人工定義的規則不夠全面,容易漏掉一些邊界情況,因而會考慮采用增強學習的原理設計一個自動駕駛的決策系統,使自動駕駛的決策系統能從數據中自動學習并優化自身的決策過程。
對于這一問題的解答可以參考Mobileye提出的基于增強學習的多智能體決策系統 [5] 。自動駕駛的決策系統不同于傳統的機器人決策系統:首先,其屬于多智能體的場景,其他智能體的行為難以預測,并會對主智能體的行為造成影響;其次,在決策中需要確保策略的安全性,安全地處理意料之外的場景,防止交通事故的發生。
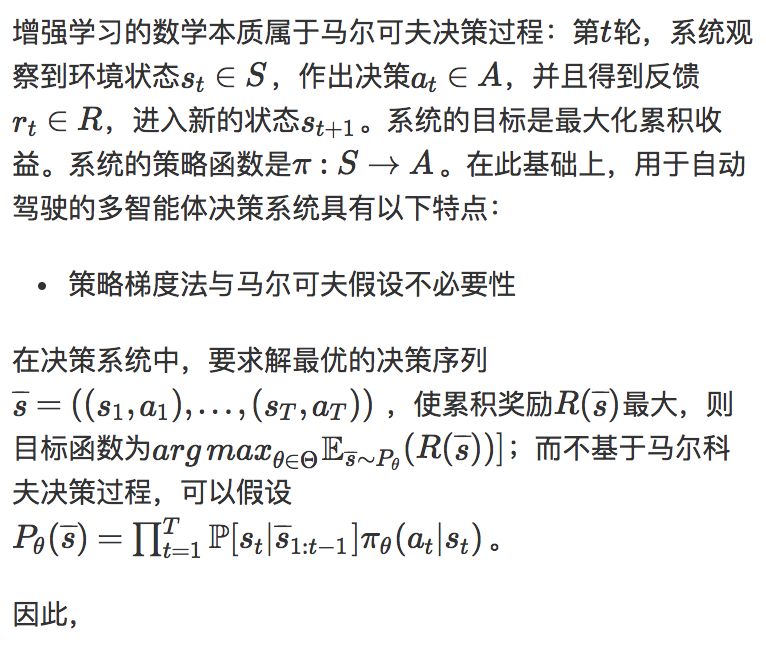
所以,


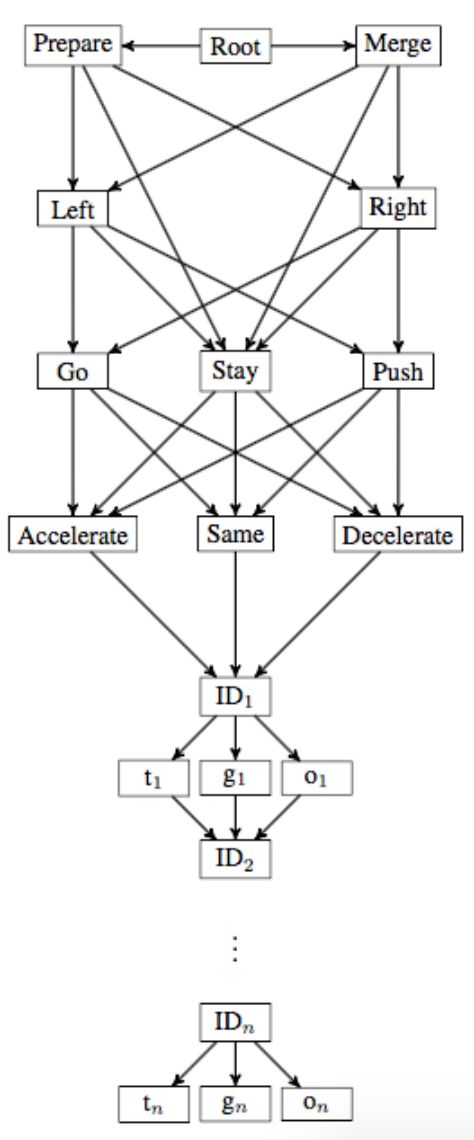
Figure 3: 雙向變道決策過程的DAG
擴展與總結
自動駕駛系統極其復雜,本章所涉及的內容僅僅涵蓋了其中一部分研發問題與進展。深度學習在自動駕駛領域的應用在圖像識別、場景分割等計算機視覺相關領域中較為廣泛與深入,而在控制、決策方面的應用還處在初步的嘗試階段。通過本章的介紹,希望大家能夠初步了解深度學習在自動駕駛系統中的應用現狀與主流應用方式,而更深入的學習了解則請閱讀相關參考文獻。
-
自動駕駛
+關注
關注
788文章
14182瀏覽量
169364
原文標題:兩道算法工程師的面試題,80%的人答不上來
文章出處:【微信號:IV_Technology,微信公眾號:智車科技】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄

自動駕駛中基于規則的決策和端到端大模型有何區別?

DiffusionDrive首次在端到端自動駕駛中引入擴散模型










 工商網監
工商網監
評論