 百度提出了一種基于學習的點云定位技術
百度提出了一種基于學習的點云定位技術
百度提出了一種基于學習的點云定位技術,該技術對傳統的定位方法進行拆解,使用深度學習網絡來取代傳統的各個環節和步驟。該方案是全球范圍內,業界首次通過使用直接作用于激光點云的深度學習網絡來解決自動駕駛的自定位問題。
作為人工智能最「硬核」的落地方向之一,自動駕駛在學術界和工業界引起了廣泛關注。自動駕駛的實現不僅將帶來汽車產品形態的根本性變化、顛覆傳統汽車技術體系和產業格局,還將引發消費者出行和生活方式、信息技術和通信方式、信息和交通基礎設施的變革。然而與高回報成正比的則是實現難度。完整的自動駕駛系統包含了自定位(Localization)、自動駕駛地圖(AD Map)、障礙物感知(Perception)、決策和規劃(Decision and Planning)、控制(Control)等模塊。
高精度自定位是實現自動駕駛的必要技術之一,目前主流的 L4 及 L5 級別的自動駕駛汽車高度依賴一套高精度、高可靠性、強場景適應能力的自定位系統。這套系統為自動駕駛系統提供了高精度厘米級的定位能力,配合上自動駕駛地圖,無人車就可以根據自身處于環境中的位置來讀取預存在地圖中的環境信息,這些預存在地圖里的數據包含了包括紅綠燈、人行橫道、車道線、道路邊界、停車位等各種無人車所需要的環境信息,借助這些信息,無人車巧妙地規避了需要實現一個高準確度的在線環境信息感知系統的難題,大幅降低無人車的技術難度,變不可能為可能。
同時,作為無人車的核心模塊之一,定位系統一旦出現問題,會造成無人車跑偏撞路肩等災難性事故。在此論文中,來自百度的技術專家們提出了一套全新的基于深度學習的激光點云自定位技術方案,實現了厘米級的定位精度,同時有著更好地對環境變化的適應能力。

鏈接:
https://songshiyu01.github.io/pdf/L3Net_W.Lu_Y.Zhou_S.Song_CVPR2019.pdf
為了驗證算法的有效性,同時百度計劃在 Apollo 平臺開放一組總計約 380km 的數據集,該數據集包含了制圖、訓練、測試三個子集,涵蓋了城市道路,園區內部道路以及高速等多種場景,地圖和測試集之間的最長時間跨度達一年。在該數據集上,百度驗證了其算法相對于傳統方法的優勢。目前,該研究論文已被計算機視覺領域頂會 CVPR 2019 收錄。
引言
眾所周知,深度學習技術近年來在各個人工智能領域都取得了令人矚目的成績,戰勝人類圍棋冠軍棋手的 AlphaGo 更是令普通大眾都深刻感受到了 AI 技術突破帶來的威力。然而,我們同時發現深度學習目前可以良好解決的問題,主要集中在需要理解、分析、判斷等人類根據經驗定義的問題。
例如,在計算機視覺領域,深度學習在解決圖像分割、圖像分類、物體檢測等問題都取得了非常良好的效果。但是,對于另一大類重要的問題,例如和測量測距、三維重建等相關的幾何問題,雖有個別工作取得了一定進展,但總體來說深度學習尚未在相關領域取得決定性的突破。無人車自定位問題則是這類問題的一個典型代表,目前無論從高校到行業巨頭,各路玩家的無人車自定位技術也都還沒有成功應用深度學習技術的先例。然而,歷史的經驗告訴我們,一旦基于學習的技術在解決某個人工智能問題領域取得突破性的進展,這種技術演進的洪流通常會以勢不可擋之勢在各個性能指標維度迅速大幅超越傳統人工設計的算法,成為新的行業技術標準。
定位作為自動駕駛的基礎模塊之一直是研究的熱點問題,現有傳統的激光點云定位技術如圖 1 上半部分所示,其中包含包含了特征提取、特征匹配和時序優化等模塊,整個算法的輸入包括實時在線激光點云,定位地圖以及來自慣性傳感器的初始預測的定位位置和姿態,最后的輸出則是定位算法優化之后的位姿結果。整體方案的思路和人類認路的方法其實是高度近似的,我們平時也是通過一些典型的地標建筑物等實現對自身位置的判斷。
不同的是,無人車的定位結果需要厘米級的位置精度以及亞角度級的姿態精度來保證無人車可準確地從自動駕駛地圖中提取必要的信息。盡管上述方案已經取得了當前最佳的定位效果,但是這類人工設計的算法進行特征提取和匹配時,對環境的變化非常敏感。在不斷動態變化的環境中無法最智能地捕捉環境中不變的信息(例如,地標、路牌等)從而實現對自身位置的高精度高魯棒性的估計,取決于環境變化的劇烈程度在實際應用中需要經常對定位地圖進行更新,這會帶來成本的上升。
百度提出的方案如圖 1 下半部分所示,通過將傳統方法中的各個流程使用不同類型的網絡結構來進行改造,實現了開創性的基于深度學習技術的無人車激光自定位技術:L3-Net。
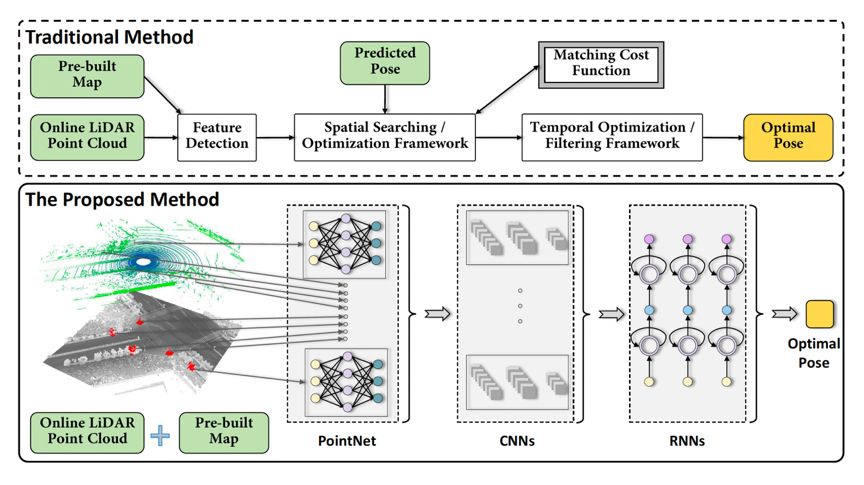
圖 1 傳統方法與 L3-Net 技術流程對比,L3-Net 使用 PointNet 網絡實現特征提取,使用 3D CNNs 網絡進行特征匹配和優化,最終使用 RNNs 網絡完成時序上的平滑。
根據論文內容,百度提出的技術方案的先進性集中體現在以下幾個方面:
提出了行業內首個基于深度學習的自動駕駛自定位技術解決方案,可以準確的估計車輛的位置和姿態,取得了厘米級精度的定位效果。
使用不同的網絡結構拆解取代傳統激光點云定位的技術流程并將其串聯起來統一訓練,使網絡能夠以端到端的方式完成在線激光點云定位任務。
即將發布一組包含城市道路、園區道路、高速等復雜場景的全長 380km 的通用數據集用于同類算法測試,更進一步充實百度 Apollo 開放平臺的開放內容。
方法
百度提出的基于深度學習的激光定位系統需要一個預先建立的激光點云定位地圖、在線激光點云以及來慣性傳感器的預測位姿作為輸入。其中預建的激光點云定位地圖是通過離線制圖算法對多次采集的同一區域的點云數據進行融合,并使用點云識別算法剔除動態地物得到。在線點云是由自動駕駛車輛上安裝的激光雷達設備在行駛過程中采集獲得,而預測位姿則由上一幀定位結果加上慣性傳感器或者車輛運動模型估計的增量運動來進行遞推。總的來說,這個定位框架通過最小化在線點云和地圖的匹配距離,優化預測位姿從而獲得定位結果的。
一般來說,無人車需要定位模塊輸出六個自由度位姿,包括三個坐標軸(x, y, z)方向上的平移(?x,?y,?z)以及三個坐標軸上的旋轉(俯仰角,翻滾角和航向角),但是由于慣性傳感器通常可以提供相對準確的俯仰和翻滾角信息,而當(x,y)估計準確時,高程 z 通常可以從地圖中獲取。因此,在目前主流的自定位系統設計中一般只估計 2D 水平平移(?x,?y)和航向角,L3-Net 也采取了類似的設計。
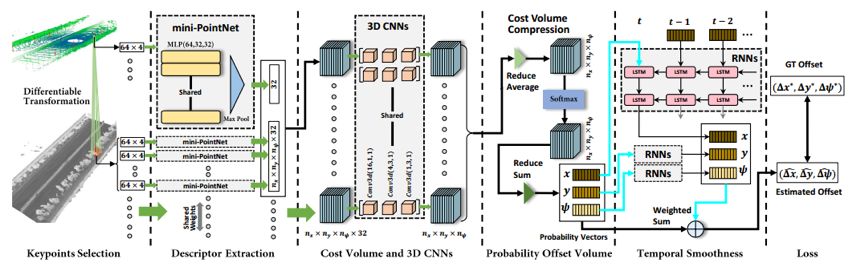
圖 2 百度提出的基于學習的激光自定位網絡架構 L3-Net。該網絡通過兩個階段進行訓練,第一階段訓練只包含了黑色箭頭部分,包括關鍵點選擇、特征提取以及基于 3D CNNs 的特征匹配;第二階段訓練包含了青色箭頭的部分,這一階段訓練包含了用于時序平滑的 RNNs 網絡。
具體來說,百度提出的 L3-Net 算法流程如圖 2 所示。對于每一幀在線點云,需要找到一系列的關鍵點,并以關鍵點為中心的收集局部點云塊從中提取特征描述子。關鍵點的提取需要同時考慮局部和全局的幾何結構關系。L3-Net 首先利用點云的密度找到了一些候選點。接著對每個候選點使用經典點云 3D 結構特征估計其線性和散亂性的概率,最終綜合考慮候選點之間的距離及其結構特性選取出關鍵點。對于每個關鍵點,該方法收集了其局部范圍內的點云信息,再通過 mini-PointNet 網絡結構得到特征描述子。其中 PointNet 是 2017 年 CVPR 收錄的直接作用于無序點云的深度學習網絡結構,L3-Net 這里使用的 mini-PointNet 是其簡化版本,由一個多層感知機(Multi-Layer Perceptron, MLP) 和一個 Max-Pooling 層組成,這也是直接作用于無序點云的網絡結構應用于高精度激光點云定位/匹配任務的首次嘗試。
在獲得了關鍵點的特征描述子后,需要對 2D 水平位置(?x,?y)和航向角結果進行求解,這等價于求解預測位姿和真值在水平位置和航向角上的偏移量。針對這個問題,L3-Net 采用了搜索的方法,對預測位姿為中心的(?x,?y,?yaw)三維狀態空間進行離散化,取其中一定范圍內的定位狀態構成集合。對于在線點云中的一個關鍵點,通過計算集合中每種定位狀態下在線點云與地圖的匹配效果可以獲得的 cost volume。接著使用 3D CNNs 對 cost volume 進行正則化操作,這樣做是為了抑制其中的異常值,提升匹配效果。正則化后,L3-Net 將所有關鍵點的 cost volume 相加并通過 softmax 層得到(?x,?y,?yaw)定位空間的 probability volume,進而估計出(?x,?y,?yaw)的定位結果。
在得到了每幀點云定位結果后,L3-Net 通過 LSTM 網絡對車輛的運動模型進行建模,利用定位的時序關系提升定位結果,實驗表明獲得了更加平滑和精確的定位結果。
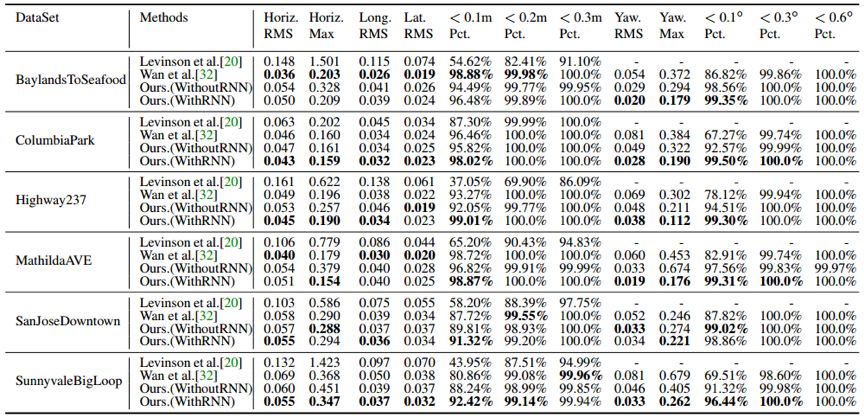
圖 3 基于深度學習的 L3-Net 激光點云定位系統與其他系統對比的結果。
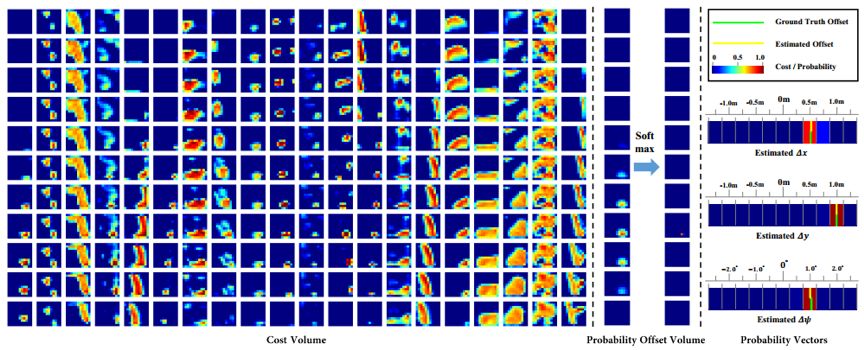
圖 4 L3-Net 定位網絡各階段輸出化的可視化效果。Cost Volume 欄中每一列表示一個關鍵點的匹配情況,其中每一行表示一種航向角狀態,每個圖片表示水平位置的 cost 分布。在把所有關鍵點的 cost volume 合并到一起后,可以看到匹配響應顯著增強。最終估計的定位結果(0.538m, 0.993m, 1.001 度)和其對應的來自數據集的定位真值(0.524m, 0.994m, 1.044 度)在最右欄展示。
總結
針對自動駕駛中的自定位問題,百度提出了一套基于深度學習的激光點云自定位算法。百度使用不同類型的網絡結構對傳統方法中的各功能模塊進行替代,并在一個包含多種場景路況和大尺度時間跨度的數據集上驗證了算法效果,實現了厘米級的定位精度。該數據集包含了城市道路、園區道路和高速等多種富有挑戰的路況場景,數據總里程達 380km,即將在百度 Apollo 平臺開放。
-
百度
+關注
關注
9文章
2328瀏覽量
91892 -
自動駕駛
+關注
關注
788文章
14225瀏覽量
169735 -
無人車
+關注
關注
1文章
307瀏覽量
36829
原文標題:CVPR 2019 | 百度無人車實現全球首個基于深度學習的激光點云自定位技術
文章出處:【微信號:IV_Technology,微信公眾號:智車科技】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
65%央企大模型落地首選百度智能云
百度智能云兩大基礎設施再升級
格靈深瞳與百度智能云達成戰略合作,共筑AI算力新基建
百度智能云四款大模型應用接入DeepSeek
百度云與阿里云上線DeepSeek模型部署服務
百度智能云點亮昆侖芯三代萬卡集群
ElfBoard開源項目|百度智能云平臺的人臉識別項目

百度正式回應進軍短劇領域
百度云開發竟然如此簡單?一文詳解!





 工商網監
工商網監
評論