") Apollo控制算法中使用的車輛動(dòng)力學(xué)模型的推導(dǎo)過程
Apollo控制算法中使用的車輛動(dòng)力學(xué)模型的推導(dǎo)過程
動(dòng)力學(xué)主要研究作用于物體的力與物體運(yùn)動(dòng)的關(guān)系。
車輛動(dòng)力學(xué)模型一般用于分析車輛的平順性和車輛操縱的穩(wěn)定性。
對(duì)于車來說,研究車輛動(dòng)力學(xué),主要是研究車輛輪胎及其相關(guān)部件的受力情況。
比如縱向速度控制,通過控制輪胎轉(zhuǎn)速實(shí)現(xiàn);
橫向航向控制,通過控制輪胎轉(zhuǎn)角實(shí)現(xiàn)。
正常情況下,車輛上的作用力沿著三個(gè)不同的軸分布:
縱軸上的力包括驅(qū)動(dòng)力和制動(dòng)力,以及滾動(dòng)阻力和拖拽阻力作滾擺運(yùn)動(dòng);
橫軸上的力包括轉(zhuǎn)向力、離心力和側(cè)風(fēng)力,汽車?yán)@橫軸作俯仰運(yùn)動(dòng);
立軸上的力包括車輛上下振蕩施加的力,汽車?yán)@立軸作偏擺或轉(zhuǎn)向運(yùn)動(dòng)。
無論是LQR或是MPC控制,都需要有車輛的模型作為基礎(chǔ)。
本文由社區(qū)開發(fā)者——卜大鵬撰寫,整理出Apollo控制算法中使用的車輛動(dòng)力學(xué)模型的推導(dǎo)過程。
車輛動(dòng)力學(xué)模型
以下,ENJOY
首先,根據(jù)牛頓第二定律結(jié)合車輛前后輪受力,有:

根據(jù)力矩平衡結(jié)合車輛前后輪受力和受力點(diǎn)到車輛重心距離,有:

上述兩式中,汽車質(zhì)量m、轉(zhuǎn)動(dòng)慣量Iz、前軸到重心距離lf和后軸到重心距離lr都是可測(cè)量的。
為了求解兩等式,需要分別求得車輛橫向加速度ay和前輪橫向受力Fyf和后輪橫向受力Fyr。
橫向加速度可以分解為由橫向位移產(chǎn)生的加速度和向心加速度。

y為橫向位移,psi為航向角,Vx為縱向速度。這樣橫向加速度就分解為位移和航向角的表達(dá)式。
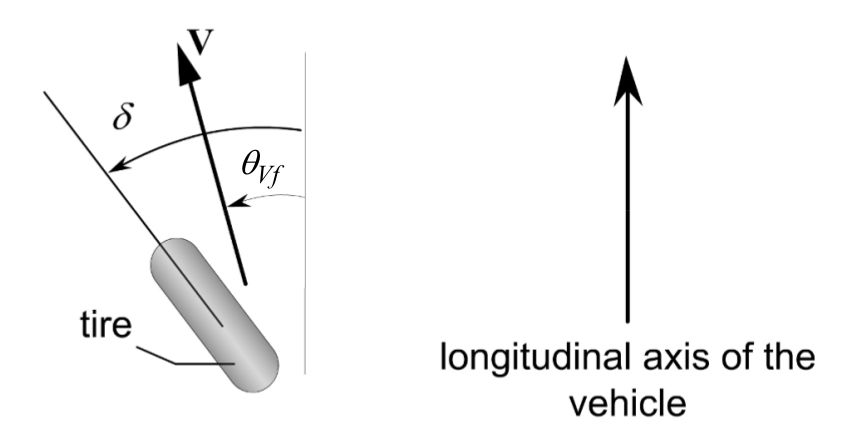
前輪橫向受力可以近似為公式4,其中Caf為前輪側(cè)偏剛度,delta為前輪轉(zhuǎn)角,theta_vf為前輪側(cè)偏角。

后輪橫向受力可以近似為公式5,其中Car為后輪側(cè)偏剛度,theta_vr為后輪側(cè)偏角。

公式4和公式5可以理解為實(shí)測(cè)數(shù)據(jù)標(biāo)定后得到近似公式。
在簡(jiǎn)化環(huán)境因素下,側(cè)偏剛度可以由簡(jiǎn)化的輪胎模型求出,前輪轉(zhuǎn)角為可獲取量,只需想辦法表示出前后輪的側(cè)偏角。
至此,上文提到的各變量在車體上的示意圖如下:
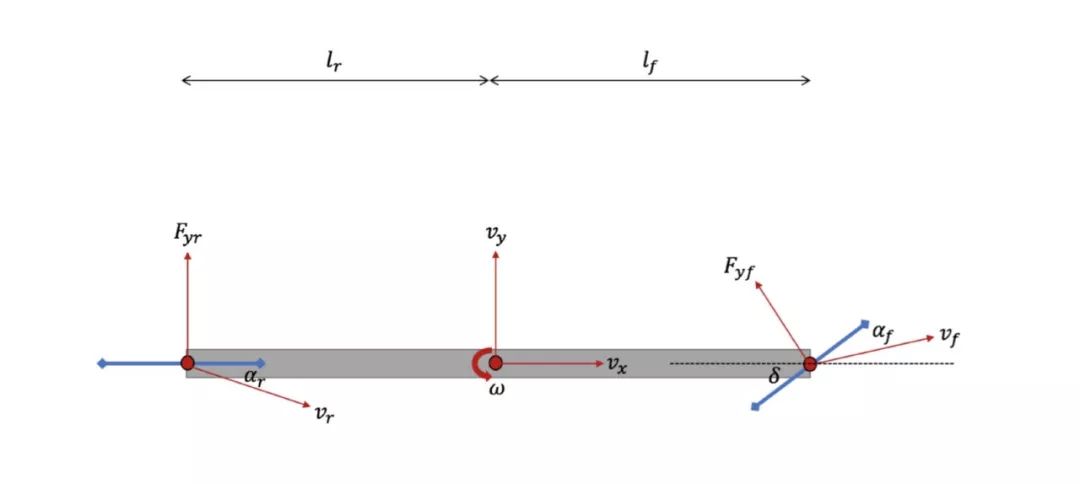
根據(jù)上圖可知,tan(theta)等于車輛橫向速度比縱向速度,而橫向速度由車輛自身橫向速度和繞重心轉(zhuǎn)動(dòng)速度組成。


在小角度轉(zhuǎn)向假設(shè)下,有:


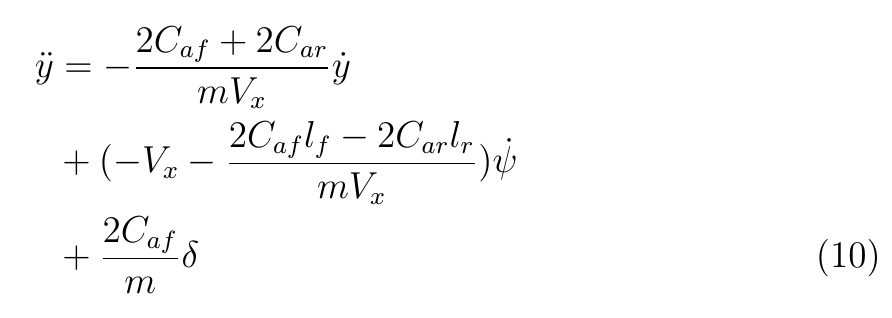
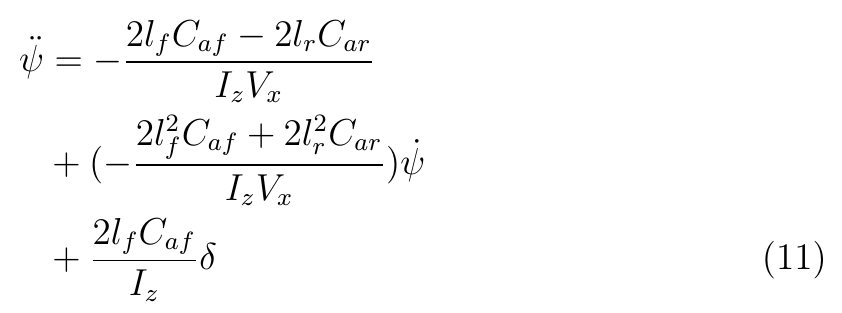
至此,把變化后的各變量表達(dá)式代入公式1和公式2,有:
設(shè)e1為橫向偏差,e2為航向角偏差,可以得到如下關(guān)系。
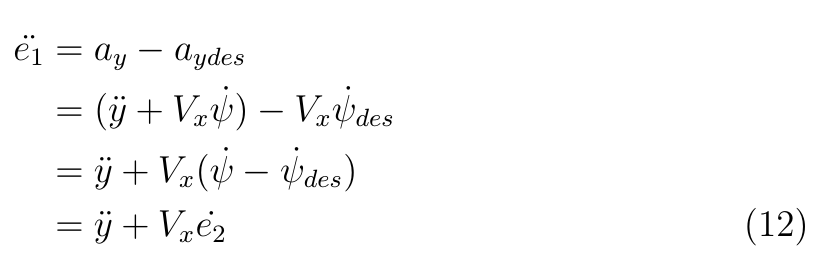
在勻速假設(shè)下,上式可進(jìn)一步推導(dǎo)出:

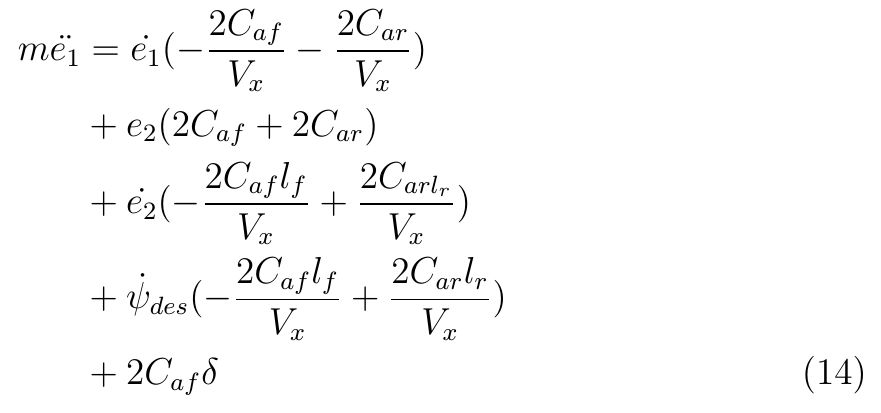
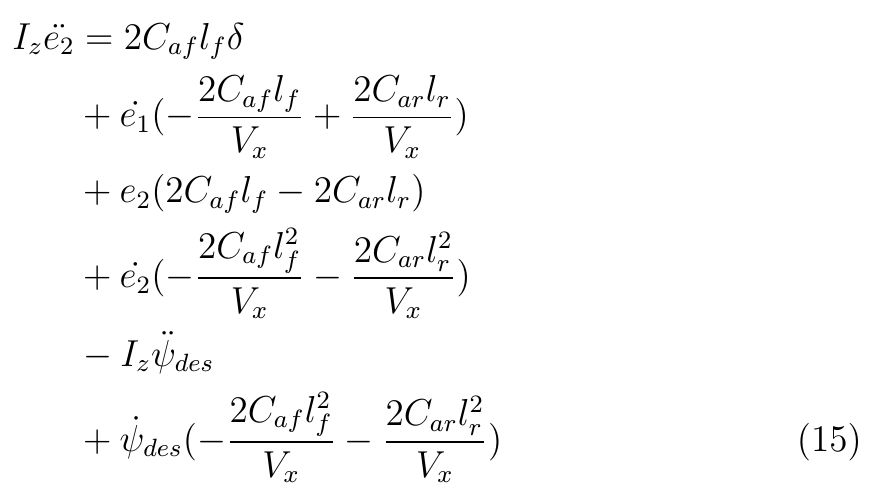
帶入公式10和公式11可以得到兩個(gè)偏差的表達(dá)式:
轉(zhuǎn)換為狀態(tài)空間的表達(dá)式:
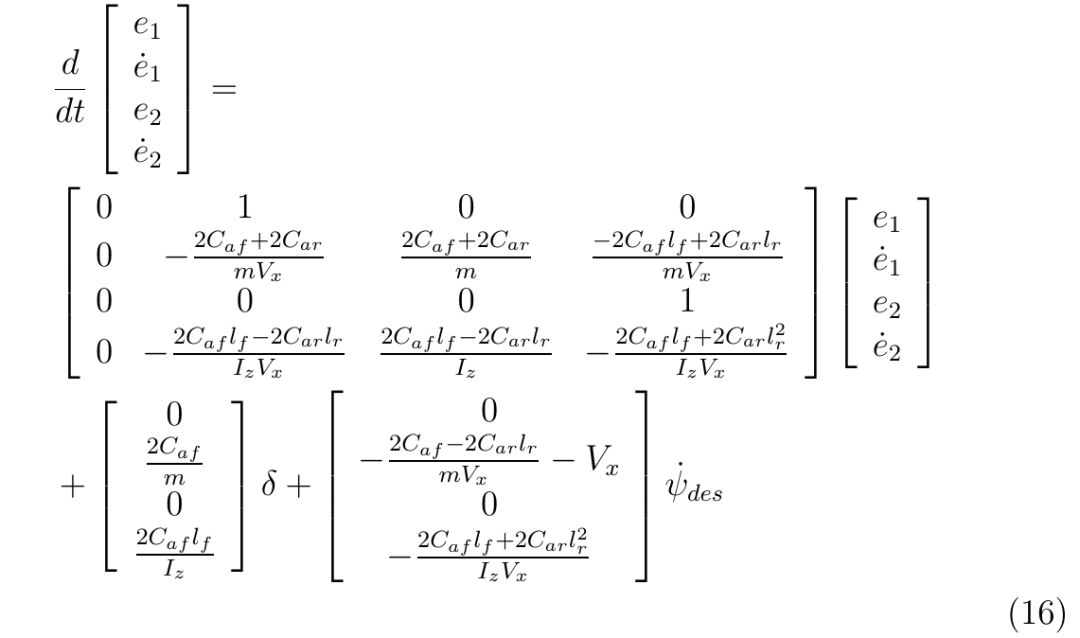
這樣就得到了在
小角度側(cè)偏角
勻速
不考慮環(huán)境因素
假設(shè)下,車輛的動(dòng)力學(xué)模型表達(dá)式。
令:
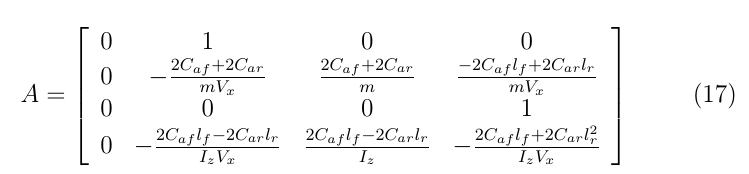

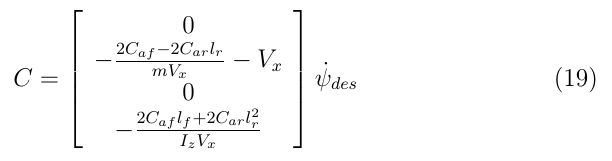


得到狀態(tài)方程:

式中,前輪側(cè)偏剛度Caf、后輪側(cè)偏剛度Car、車身質(zhì)量m、轉(zhuǎn)動(dòng)慣量Iz、前輪到重心距離lf、后輪到重心距離lr都是常量;
每個(gè)時(shí)刻的橫向偏差e1、航向偏差e2、縱向速度Vx、前輪轉(zhuǎn)角delta都是可測(cè)量量;
目標(biāo)航向psi是可獲取量。
這樣每個(gè)運(yùn)算周期通過傳感器測(cè)得的數(shù)值更新測(cè)量量就可以用這個(gè)模型通過相應(yīng)算法實(shí)現(xiàn)目標(biāo)軌跡的跟蹤了。
但因?yàn)樾枰褂糜?jì)算機(jī)進(jìn)行數(shù)值計(jì)算,推導(dǎo)截至到上面的連續(xù)模型還不夠,還需要對(duì)上述模型進(jìn)行離散化。
對(duì)于連續(xù)系統(tǒng)有:

令采樣周期為T,t0=kT,t=(k+1)T,即考慮k到k+1時(shí)刻的狀態(tài)響應(yīng),有:

考慮在采樣周期內(nèi)u不變,C為常數(shù),有

對(duì)上式積分中做變量替換,令t=(k+1)T-tau,有

將上式與定常離散線性系統(tǒng)的狀態(tài)方程

比較可知,要使兩式對(duì)任意x(kT)和u(kT)成立,有


公式23到公式29即為連續(xù)狀態(tài)空間到離散狀態(tài)空間的精確離散化推導(dǎo)過程。為了便于后續(xù)計(jì)算,還需要對(duì)精確離散化進(jìn)一步進(jìn)行近似離散化,因?yàn)橛?/p>

對(duì)上式分子分母同時(shí)做泰勒展開,取前兩項(xiàng),有

同樣,對(duì)式23進(jìn)行泰勒展開,取前一項(xiàng),有

剩下的常數(shù)項(xiàng),顯然有

至此,得到了連續(xù)模型轉(zhuǎn)換為后續(xù)算法可用的近似離散化模型

-
控制算法
+關(guān)注
關(guān)注
4文章
170瀏覽量
22142 -
動(dòng)力學(xué)
+關(guān)注
關(guān)注
0文章
107瀏覽量
17191 -
Apollo
+關(guān)注
關(guān)注
5文章
346瀏覽量
18702
原文標(biāo)題:開發(fā)者說 | Apollo控制算法之汽車動(dòng)力學(xué)模型
文章出處:【微信號(hào):Apollo_Developers,微信公眾號(hào):Apollo開發(fā)者社區(qū)】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
輪轂電機(jī)驅(qū)動(dòng)電動(dòng)汽車垂向動(dòng)力學(xué)控制研究綜述
基于多體系統(tǒng)動(dòng)力學(xué)的空氣懸架大客車平順性試驗(yàn)仿真研究
帶齒輪傳動(dòng)的機(jī)車-軌道空間耦合動(dòng)力學(xué)模型
飛行器動(dòng)力學(xué)參數(shù)在線辨識(shí)EKF算法實(shí)驗(yàn)流程
分布式驅(qū)動(dòng)電動(dòng)汽車的動(dòng)力學(xué)控制有哪幾種類型?常見問題是什么?
熱分析動(dòng)力學(xué)
車輛動(dòng)力學(xué)控制系統(tǒng)(VDC)是什么意思
如何使用DSPACE實(shí)現(xiàn)嵌入式車輛動(dòng)力學(xué)仿真平臺(tái)的開發(fā)設(shè)計(jì)
經(jīng)緯恒潤(rùn)自主研發(fā)的綜合車輛動(dòng)力學(xué)仿真軟件ModelBase
綜合車輛動(dòng)力學(xué)仿真軟件ModelBase的簡(jiǎn)單介紹
直播回顧 |車輛動(dòng)力學(xué)模型在仿真測(cè)試中的應(yīng)用實(shí)踐

基于車輛動(dòng)力學(xué)模型的橫向控制






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論