") 無人機(jī)、機(jī)器人與自駕車的動(dòng)態(tài)姿態(tài)測(cè)量
無人機(jī)、機(jī)器人與自駕車的動(dòng)態(tài)姿態(tài)測(cè)量
測(cè)量一個(gè)平臺(tái)的動(dòng)態(tài)翻滾(roll)和俯仰(pitch)角度,對(duì)于各種不同的應(yīng)用都十分有幫助。典型的例子之一是飛機(jī)的垂直陀螺儀或姿態(tài)儀,能夠?yàn)轱w行員在空中操作飛機(jī)時(shí)提供相對(duì)于地平線的參考。最近,越來越多的動(dòng)態(tài)傾斜應(yīng)用開始出現(xiàn)在無人機(jī)、機(jī)器人和自動(dòng)駕駛車系統(tǒng)中。
本文介紹使用慣性測(cè)量單元(IMU)估算在動(dòng)態(tài)條件下翻滾和俯仰的基本物理學(xué)和數(shù)學(xué),并提供可用的開放源程序碼參考,可用于在ACEINNA的OpenIMU平臺(tái)上實(shí)現(xiàn)數(shù)學(xué)計(jì)算。
保持平衡,別傾倒了…
測(cè)量傾斜的首要也是最基本的方法是進(jìn)行液位(liquid level)測(cè)量,例如木匠師傅采用水平測(cè)量工具。想想看,這其實(shí)只是對(duì)于地球引力的簡單加速度測(cè)量。
液位是靜態(tài)重力加速度的簡單測(cè)量
IMU中的三軸加速度計(jì)可以在靜態(tài)條件下直接測(cè)量該響應(yīng)。這種測(cè)量的靜態(tài)精確度通常受到整個(gè)加速度計(jì)偏置精確度的影響,包括溫度效應(yīng)。
靜態(tài)翻滾和俯仰測(cè)量的完整數(shù)學(xué)計(jì)算如下所示。此數(shù)學(xué)計(jì)算方式建置在稱為‘Leveler’的簡單ACEINNA OpenIMU應(yīng)用程序中。您可以從此來源的ACEINNA OpenIMU下載并安裝該程序代碼,也可以使用ACEINNA Developer Website和編譯程序代碼將其上傳至OpenIMU。
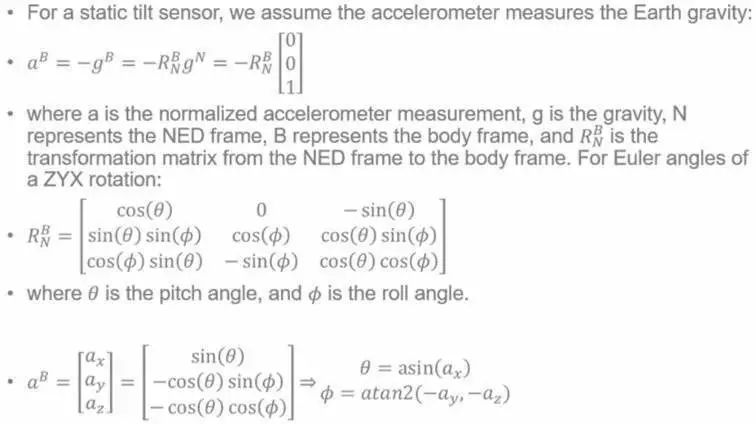
使用IMU進(jìn)行靜態(tài)傾斜的方程式簡介
當(dāng)然,問題在于加速度計(jì)如何響應(yīng)平臺(tái)的傾斜,以及平臺(tái)的線性加速度,如下圖所示。再者,光是使用加速度計(jì),也不太可能區(qū)分出上述兩者。
在動(dòng)態(tài)條件下基于加速度的傾斜測(cè)量誤差
值得慶幸的是,IMU內(nèi)建一個(gè)三軸速率陀螺儀(或陀螺儀),可以響應(yīng)三軸中每個(gè)軸的角度變化率。簡單的偏斜率示例如下圖。關(guān)于角速率陀螺儀的好消息是它并不會(huì)直接響應(yīng)線性加速度或線性運(yùn)動(dòng);壞消息則是將角速率轉(zhuǎn)換為角度的過程涉及積分,將會(huì)因?yàn)橥勇輧x的偏置和噪聲而隨時(shí)間漂移。此外,陀螺儀并沒有實(shí)際的水平測(cè)量值,因而無法確定絕對(duì)水平,如氣泡水平儀或是基于加速度的重力測(cè)量等。
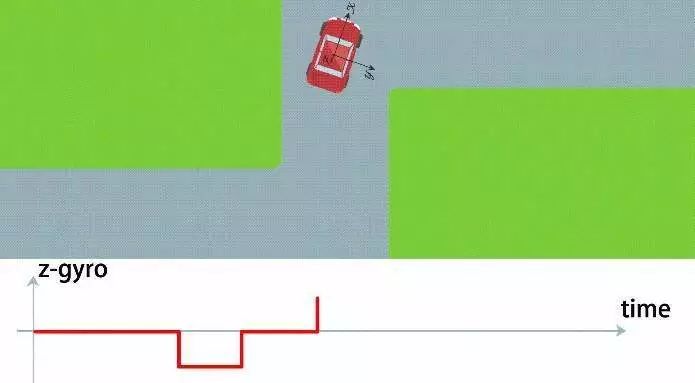
角速率陀螺儀測(cè)量角度的變化率
當(dāng)然,下一步是將兩種測(cè)量形式結(jié)合于一個(gè)解決方案中。加速度計(jì)用于作為靜態(tài)水平的長期參考;即「垂直」。這一數(shù)據(jù)與姿態(tài)變化的「陀螺儀」測(cè)量值融合,為整體提供精確且無漂移動(dòng)態(tài)響應(yīng)。這種「垂直+陀螺儀」的經(jīng)典傳感器融合,是飛機(jī)「垂直陀螺儀」來源的基礎(chǔ)。在實(shí)作中進(jìn)行這種測(cè)量的一種好方法是使用四元數(shù)更新,沿著卡爾曼(Kalman)濾波器將角速率傳播到姿態(tài)。該數(shù)學(xué)計(jì)算方式如下:

以IMU實(shí)現(xiàn)動(dòng)態(tài)姿態(tài)的卡爾曼濾波等式
就像靜態(tài)水平儀程序代碼一樣,ACEINNA的開放來源OpenIMU平臺(tái)提供了上述數(shù)學(xué)計(jì)算的高性能調(diào)諧建置。只需安裝適于Visual Studio Code的ACEINNA Extension,然后點(diǎn)選「客制IMU示例」(Custom IMU Examples)。動(dòng)態(tài)傾斜應(yīng)用程序稱為‘VG_AHRS’,還包括使用板載磁力計(jì)以及硬/軟鐵補(bǔ)償,以實(shí)現(xiàn)動(dòng)態(tài)穩(wěn)定航向測(cè)量。
當(dāng)然,我還是一如往常地歡迎你的評(píng)論與提問。
-
機(jī)器人
+關(guān)注
關(guān)注
213文章
29504瀏覽量
211621 -
無人機(jī)
+關(guān)注
關(guān)注
230文章
10739瀏覽量
185597
原文標(biāo)題:教你如何測(cè)量無人機(jī)、機(jī)器人與自駕車的動(dòng)態(tài)姿態(tài)
文章出處:【微信號(hào):youuav,微信公眾號(hào):無人機(jī)網(wǎng)】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
RT-Thread睿賽德開源無人機(jī)領(lǐng)域硬核飛控上線!| 產(chǎn)品動(dòng)態(tài)

優(yōu)化無人機(jī)航向控制的核心:IST8310飛控地磁傳感器解析

《手把手教你做星閃無人機(jī)—KaihongOS星閃無人機(jī)開發(fā)實(shí)戰(zhàn)》系列課程課件匯總
晶體晶振在無人機(jī)上的應(yīng)用
IMU加持:無人機(jī)&機(jī)器人再啟新章!
從姿態(tài)到飛行控制,IMU全方位守護(hù)無人機(jī)飛行

嵌入式學(xué)習(xí)-飛凌嵌入式ElfBoard ELF 1板卡-運(yùn)動(dòng)追蹤之六軸傳感器使用場(chǎng)景
飛凌嵌入式ElfBoard ELF 1板卡-運(yùn)動(dòng)追蹤之六軸傳感器使用場(chǎng)景
霍爾傳感器在無人機(jī)中的應(yīng)用

DIY了一臺(tái)無人機(jī),用全志T113芯片
安費(fèi)諾連接器賦能自主機(jī)器人未來發(fā)展
知語科技無人機(jī)反制系統(tǒng)的應(yīng)用與挑戰(zhàn)





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論