 探討高空間分辨率的無人機影像在亞高山針葉林樹冠信息提取中的應用
探討高空間分辨率的無人機影像在亞高山針葉林樹冠信息提取中的應用
一、概述
樹冠是樹木光合作用的主要場所,是樹木乃至森林的重要組成部分。準確獲取樹冠信息有助于監測樹木長勢、估算樹木生物量及小班蓄積量、預防樹木病蟲害,在森林經營管理中越來越受到重視。位于我國青藏高原東南緣的川西亞高山針葉林,既是長江上游重要的生態屏障,也是許多高寒生物物種的分化和變異中心,在涵養水源、調節區域氣候和維持生物多樣性等方面有著不可替代的作用。但川西亞高山針葉林區往往海拔較高,交通不便,傳統方法難以用于研究該區樹冠。且傳統調查工作量大、成本高、周期長、效率低,不能及時反映森林情況,滿足不了現代林業發展的需求。隨著計算機和對地觀測技術的發展,現代遙感與攝影測量技術的應用將會把亞高山針葉林研究的尺度和精度提升到一個新的高度。
無人機是近年迅速發展起來的對地觀測技術。配備不同傳感器的無人機,可由無線電遙控設備進行手搖操縱飛行,或在計算機預編程序控制下自主飛行。利用無人機可快速拍攝航空影像,獲取所需空間遙感數據,并實時處理、建模和分析。傳統方法往往受限于調查成本和效率,衛星遙感受限于低空間分辨率、云影、低時效性,均不能滿足亞高山針葉林樹冠信息快速準確提取的要求。無人機遙感具有高空間分辨率、可云下飛行、快速靈活、低成本等優點,為快速獲取亞高山針葉林影像及處理影像獲取信息提供了有效途徑。
目前已有基于無人機高分影像對森林樹冠信息提取的研究。樊仲謀等獲取試驗區無人機影像后,提取出單木樹冠并獲取樹冠的直徑和面積大小,測量精度達到82.2%。呂曉君等通過無人機對病蟲害危害的松林進行航拍,生成數字正射影像圖。利用松樹樹冠顏色改變,統計出作業區域內變色樹木數量。國外Hernández等基于研究區無人機影像,采用混合像元和基于區域的算法自動提取單木,估測出單木樹高、冠幅等參數。以樣地實測數據進行精度檢驗,結果表明樣方內所有樹木都被正確探測,參數提取精度也較高。Panagiotidis等結合三維重建技術和GIS技術(地理信息系統),從無人機影像中提取樹高、冠幅,取得了較好的效果。
論文探討高空間分辨率的無人機影像在亞高山針葉林樹冠信息提取中的應用。以四川省貢嘎山雅家梗局部范圍內的亞高山針葉林為研究對象,以高分辨率無人機影像為數據源,利用面向對象方法提取出樹冠,結合空間分析整飾結果,并提取出單元面積樹木數、林分郁閉度、東西向冠幅、南北向冠幅四個參數。以人工勾繪結果為參考進行精度驗證,結果表明提取方法高效易行,精度可靠。
二、研究區概況及無人機系統
2.1 研究區概況
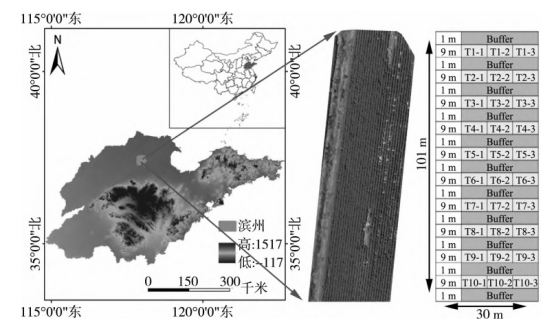
選擇貢嘎山雅家梗為研究區,經度范圍102.02°~102.03°E,緯度范圍29.86°~29.88°N,研究區位置如圖1所示。貢嘎山位于青藏高原東南緣,全區域年均溫度東高西低、南高北低,降雨豐富。雅家梗位于貢嘎山東坡,處于我國東部亞熱帶濕潤季風區與青藏高原寒冷氣候的過渡帶,海拔高程3000米~4000米,多年平均氣溫3.8℃,年平均降水量1940mm。氣候和植被呈寒溫帶特征,土壤層較厚,以山地暗棕壤為主。雅家梗地區森林資源豐富,植被垂直分異明顯,分布有大面積的以冷杉屬(AbiesMill)、云杉屬(PiceaDieter)為主的亞高山常綠針葉林和以高山櫟(Quercusspinosa)為主的山地硬葉常綠闊葉林,在區域水土保持、生態系統穩定性維護方面起著重要作用。
圖1 貢嘎山雅家梗空間位置示意圖
2.2 無人機系統及作業過程
所用飛馬F1000無人機遙感系統由四部分組成:電動固定翼無人機飛行平臺(圖2 (a)),飛行控制系統(圖2 (b)),微型單反相機(圖2 (c))及地面控制系統(圖2 (d))。無人機飛行平臺翼展1.6m,機身長1.1m,起飛重量3.2kg。飛行控制系統主要控制和穩定無人機的起飛/著陸、飛行高度、航向和姿態。所配備經改裝后的SONY ILCE-5100微單相機,尺寸為75×63×50mm,重192g(含鏡頭)。地面控制系統的主要功能有航跡規劃與上傳、飛行姿態數據下載、遙控指令發送等。固定翼無人機具有續航時間長、飛行速度快、飛行效率高、穩定安全等優勢,適合高海拔復雜山地環境的航拍作業。
圖2 飛馬F1000電動固定翼無人機遙感系統
航攝在2016年5月24日進行,試驗當天晴天,風速較小,適合無人機航拍作業(圖3)。規劃飛行航線時,設置航向重疊率為80%,旁向重疊率為60%,保證后期數據處理精度。將預設航線導入飛行控制系統,以70km/h的速度飛行90分鐘,拍攝高度約1000m。獲取JPEG格式的真彩色影像451張,空間分辨率為0.15m,有紅、綠、藍3個波段,2400萬像素(6000×4000)。
圖3 現場組裝和航拍作業照片
三、研究方法
3.1 影像處理
圖4 研究區無人機正射影像
采用俄羅斯的無人機數據處理軟件AgiSoft PhotoScan進行影像處理。它根據最新的多視圖三維重建技術,基于影像自動生成高分辨率正射影像及帶精細色彩紋理的數字高程模型 。帶有空間參考坐標的數據產品可直接測量,為研究者帶來了極大的便利,目前已廣泛應用于林業調查、考古等行業。主要處理流程為:檢查無人機影像,篩選掉航線拐角處重疊度過大、姿態角過大、成像效果較差的影像;輸入影像及姿態數據,自動空三,正射校正,圖像拼接。完成處理后,裁剪影像獲取研究區的高分辨率正射影像(圖4)。
3.2 多尺度分割
采用面向對象的方法提取樹冠,用美國Trimble公司的軟件eCognition實現。無人機高分辨率影像有著豐富的空間結構信息和清晰的紋理細節信息,能準確表達對象的表面紋理、內部結構、形狀面積和空間關系等。面向對象的方法綜合影像對象的光譜、形狀、紋理、鄰域、層次、空間位置等特征信息,分割影像得到同質對象,再根據目標地物的實際要求進行提取,能夠得到較高精度的信息提取結果。在面向對象的遙感影像信息提取技術中,影像分割是關鍵技術之一,分割結果直接影響后續的分類及信息提取效果。分割時需要輸入三個參數:分割尺度、形狀因子、緊湊度因子。尺度(scale)參數即基于異質性最小的區域合并算法中的閾值,它直接決定了影像對象大小、分割的質量及信息提取的精度。eCoginition采用多尺度分割方法,即在不同尺度上對影像進行分割,這樣可避免采用同一尺度分割影像容易造成的“分割不足”或“分割過度”現象。其分割原則是:影像對象內部同質性最大、異質性最小。依據經驗并參考其他學者研宄,形狀和緊湊度因子均設為0.5。
利用eCoginition軟件的ESP (Estimation of Scale Parameter) 插件,結合具體的信息提取目標(這里是針葉林樹冠),找到影像的最佳分割尺度。此次處理中候選最佳分割尺度有24、69、72、81、90、104。從圖5可以看出,當分割尺度為24時,影像被分割得過于破碎(圖5(a));分割尺度為69時,略破碎,沒達到一次分割的目的(圖5(b))。當分割尺度為72時,破碎對象幾乎不存在,樹冠輪廓清晰可見(圖5(c))。當分割尺度由81到104時,對象逐漸被大規模合并,不是理想結果(圖5(d)~(f))。因此確定本次分割的最佳分割尺度為72。
圖5 不同分割尺度效果對比圖
3.3 單木樹冠提取
采用最鄰近分類的方法提取單木樹冠。最鄰近分類是監督分類的一種,根據要求選擇樣本,確定合適的特征集,計算樣本在所選特征之間的分離程度。所選研究區為海拔3000米以上的亞高山針葉林分布區,沒有人工建筑的干擾,因此將分類系統設為冠層和地面兩類。然后構建特征空間,特征空間指參與分類的特征。面向對象分類時可直接使用波段參與,也可以利用標準差(standard deviation)、波段比率(ratio)、亮度(brightness)等光譜特征,形狀指數(shape index)、長寬比(length-widthratio)等形狀特征,以及GLCM和GLDV兩種類型的多種紋理特征等。按照要求選擇樣本后進行特征空間優化,即基于各類別的樣本及初始特征集,找到類別之間區別最大的特征組合,作為分類的最優特征集。優化目的在于避免采用過多特征導致分類特征冗余、計算量增大、分類精度降低等問題。考慮到軟件運行負荷和距離,最終選擇用10個特征:Ratio R,Ratio G,Ratio B,Shape index,Mean R,Mean G,Mean B,GLCM Dissimilarity,GLCMCorrelation,VI’。VI’是模擬歸一化植被指數(normalized difference vegetationindex,NDVI)提取植被的一個參數,其公式為:
確定最優特征空間后進行分類,提取出樹冠。結果文件以shp格式輸出,疊加分類圖到原始影像上。少量地面被錯分到樹冠類,使用編輯器直接修正分類結果;合并少量分割過度的樹冠;修改錯誤分類的部分。經多次修正檢查后,完成分類結果整飾。
四、結果與討論
4.1 樹冠參數提取及分析
由于缺少野外實地調查數據,因而對原始影像目視解譯,得到的樹冠提取結果被視為參考圖,且參考圖被認為是樹冠的準確表達。對比參考圖和上一步自動提取結果,分析二者間的差異,以此衡量基于面向對象方法的樹冠提取精度。分別提取參考圖和自動提取結果的郁閉度、單元面積樹木數兩個參數。由于所選研究區面積不是很大,所以分別從參考圖和自動提取結果中選擇對應的20個樹冠,再分別提取這20個樹冠的東西冠幅和南北冠幅。計算公式分別是:
式中,D代表郁閉度,Ac代表樹冠總面積,A代表研究區面積。N代表單元面積樹木數,Nc代表樹木棵數。W、L分別代表單個樹冠東西向、南北向冠幅,Ymax、Ymin、Xmax、Xmin分別代表樹冠區域的最大Y坐標、最小Y坐標、最大X坐標、最小X坐標。對比結果見圖6,表1,表2。
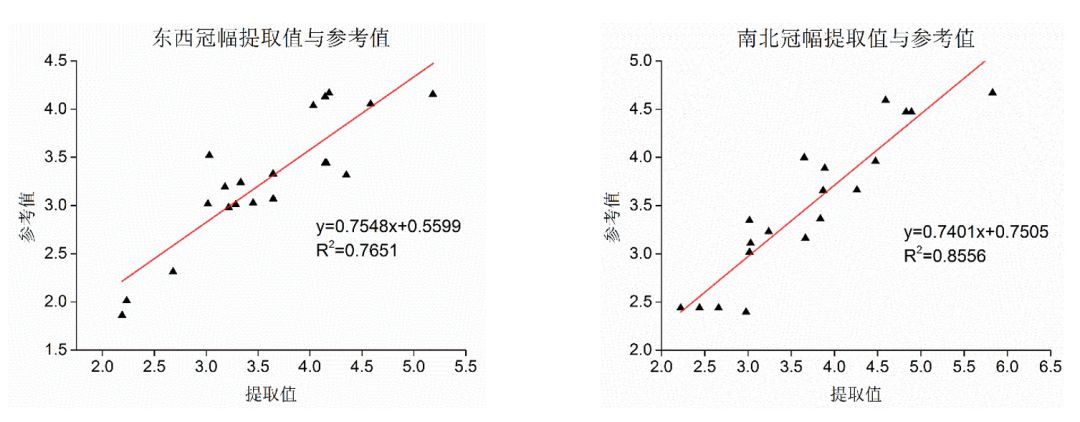
圖6 樹冠冠幅提取值與參考值散點圖
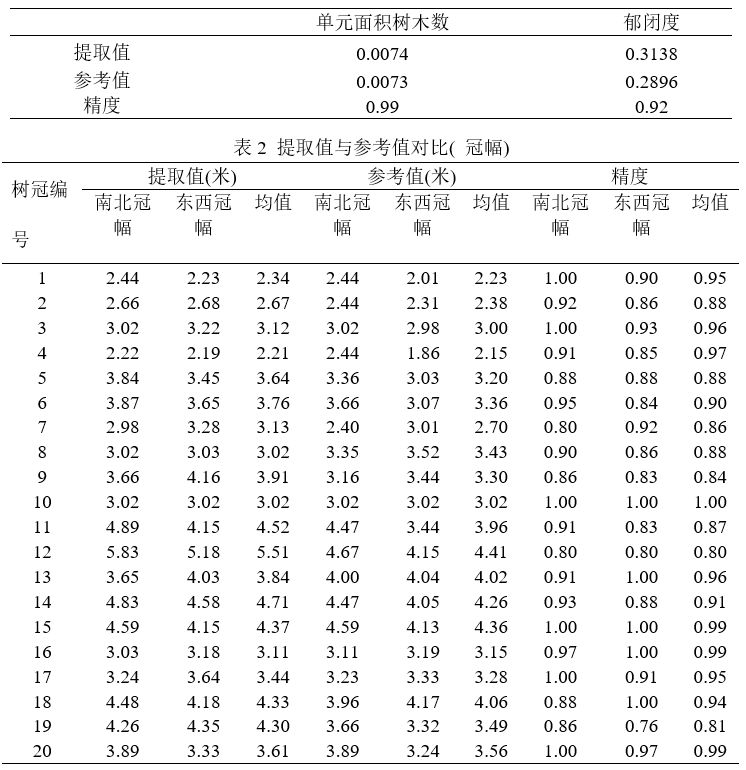
表1 提取值與參考值對比(單元面積樹木數與郁閉度)
4.2 討論
如圖6所示,自動提取的樹冠與人工勾繪的樹冠呈較強的線性關系。自動提取的東西冠幅和人工勾繪的東西冠幅的R2達0.7651,自動提取的南北冠幅和人工勾繪的南北冠幅的R2達0.8556。這表明,基于面向對象的無人機高分影像樹冠信息提取是可行的,精度較高,可有效替代人工目視解譯,減少勞動成本。
從表1、表2可看出,基于面向對象提取的郁閉度、冠幅大小、單元面積樹木數總體上大于人工提取的結果。導致這一現象的原因是:獲取研究區無人機影像時,影像不可避免地受到陰影的影響。陰影與某些樹冠在紋理、光譜特征上差異不明顯,從而被誤分到樹冠,導致樹冠自動提取結果的相關參數總體上大于真實情況。
五、結論
樹冠可用來估測樹木胸徑、樹高、單木材積、林分郁閉度和生物量等重要參數,是監測樹木長勢、調查森林資源的關鍵指標之一,其獲取是建立森林定量化管理平臺的關鍵[20]。隨著無人機遙感和信息提取技術的發展,高空間分辨率的無人機影像使快速、準確獲取樹冠信息成為可能。論文基于面向對象方法,利用無人機遙感影像,提取四川貢嘎山雅家梗內某一區域亞高山針葉林的樹冠及參數。關鍵技術和步驟包括:無人機影像獲取,影像預處理,最佳分割尺度確定,最優特征空間選擇,最鄰近分類,結果整飾,參數提取及精度對比分析。結果精度較高,自動提取的東西冠幅和南北冠幅與真實冠幅的R2分別達0.7651、0.8556,單元面積樹木數和郁閉度的提取精度分別達0.99、0.92。這驗證了基于面向對象的無人機高分影像樹冠信息提取的可行性和可靠性。
目前的單木樹冠提取往往僅針對特定的樹種和立地條件進行,沒有適合所有林分的提取方法。論文提出的參數提取方法主要針對相對稀疏的亞高山針葉林,研究區內樹種相對單一,樹冠交叉或重疊現象較少,針對該現象的樹冠參數信息提取是下一步的研究工作。無人機影像不可避免地帶有陰影,這會造成樹冠提取的精度損失,如何減少甚至消除陰影的影響有待進一步研究。初始特征集的選擇會影響后續最優特征空間的確定,因而后面的工作將選擇基于更多不同初始特征集下的最優特征組合參與分類,以提高精度。在做精度驗證時,有條件的情況下,應盡量獲取地面實地調查數據作為參考。將人工目視解譯結果作為參考時,應盡量有多名具有相關專業背景的人員參與解譯,以增加驗證的可靠性。
-
傳感器
+關注
關注
2562文章
52548瀏覽量
763630 -
控制系統
+關注
關注
41文章
6752瀏覽量
111794 -
無人機
+關注
關注
230文章
10728瀏覽量
185526
原文標題:無人機遙感在亞高山針葉林樹冠參數信息自動提取中的應用
文章出處:【微信號:feimarobotics2015,微信公眾號:飛馬機器人】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
無人機電力巡檢系統:高空作業的“安全衛士”

高光譜相機的空間分辨率,光譜范圍等參數我們要如何理解
科達嘉電感在無人機系統中的應用
激光雷達技術或可助力防御無人機
遙感影像分析的方法與步驟
珠海航展無人機搭載相機選擇的深度解析
激光雷達在無人機中的應用實例
揭秘!機載無人機攝像頭的黑科技:從偵察到打擊的全能之眼


基于無人機多光譜遙感的棉花生長參數和產量估算
無人機機載高光譜成像系統的應用及優勢
【《時間序列與機器學習》閱讀體驗】+ 時間序列的信息提取
無人機智能巡檢系統

凱茉銳電子 索尼LX-LR1配無人機云臺,靈動捕捉高空精彩瞬間!
基于無人機高光譜遙感的荒漠化草原地物分類研究2.0





 工商網監
工商網監
評論