 四足機器人ANYMAL挑戰波士頓機器狗
四足機器人ANYMAL挑戰波士頓機器狗
有一個機器人正在挑戰波士頓動力公司出的那個著名的機器狗,它就是來自瑞士蘇黎世聯邦理工學院機器人系統實驗室和 ANYmal 機器人公司合作研制開發的四足機器人——ANYMAL。
雖然這貨與 SpotMini 很相似,但它可不是刻意地東施效顰哦~
因為,四足這種形式是建立穩定機器人的絕佳模型,即使發生故障它們仍可站立起來~
ANYmal 采用兼容而精確的可控扭矩致動器控制,使其能實現動態平衡和具備向上攀爬的能力。
借助于配備的激光傳感器和攝像機,機器人可感知其環境,不斷創建地圖并精確定位。
基于這些信息,ANYmal 最終能自主規劃導航路徑,在行走時可以精心選擇的立足點。
最近,ANYMAL 在2019 CES 展會上可謂大出風頭,它化身快遞小哥進行投送,這個未來物流的畫面,著實是賺足了眼球!
這篇論文詳細闡述了深度研究和訓練 ANYmal 的過程與結果,例如其獨特的控制策略。
在訓練過程中,ANYmal 被人工智能所加持,其移動速度提升到原記錄的25%,并能以非常類似真實動物的方式走動。
現在的 Anymal 機器人重約30kg,可載重10kg。
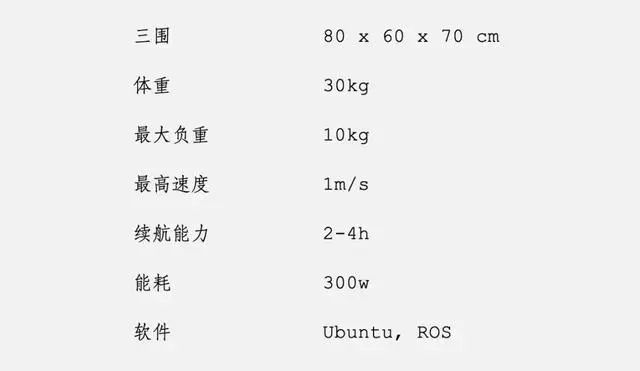
四足移動速度與幾乎一名成人步行速度相同。
Anymal 甚至 get 到了使用電梯的技能。
而當實驗室研究人員給 ANYmal 配上了六自由度機械手臂后,它可以和 SpotMini 機器人一樣輕松完成開門動作~
撿礦泉水瓶也是輕而易舉的事情~
而在經過了反復訓練之后,ANYmal 自身平衡能力更穩定,任你怎么踹,這貨都能都泰然處之~
最牛的是,這貨在被暴力踹倒之后,還能立刻翻轉并站立起來,動作像極了真實小狗的動作。
ANYmal 摔倒后爬起來的過程卻是超級靈活,幾乎和真正的狗狗沒啥差別。。
另外研究人員還開發了一種仿真模式——在電腦里仿真出 ANYmal 的虛擬版本。這樣不僅能同時訓練多只ANYmal,而且這種虛擬的學習速度是現實的1000倍!
他們先讓虛擬狗自己訓練11個小時,再將結果下載到屋里機器人身上,效果極其好~
另外,ANYmal 還能通過增加高端的 RGB 變焦相機遠距離收集圖像信息,對壓力表、液壓計等進行檢查。
當然了,ANYmal 還可以做很多其他的事情:軍用、工業作業、救火救災現場,尤其能在具有挑戰性的地形中和惡劣環境下進行自主移動和操作,并與環境安全交互。(文章來源于抖創意)
-
機器人
+關注
關注
213文章
29482瀏覽量
211541 -
人工智能
+關注
關注
1804文章
48701瀏覽量
246454
原文標題:瑞士ANYmal:真正挑戰波士頓動力的機器狗出現了!
文章出處:【微信號:robotinside2014,微信公眾號:移動機器人產業聯盟】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
NVIDIA 通過云端至機器人計算平臺驅動人形機器人技術,賦能物理 AI

盤點#機器人開發平臺
開源項目!基于Arduino控制的六足機器人
波士頓機器人滑環的技術特點與應用前景
波士頓動力與RAI Institute聯手推進人形機器人技術

四足巡檢機器人特點和作用是什么

廣汽輪足人形機器人,保安外賣家教樣樣來
【「具身智能機器人系統」閱讀體驗】2.具身智能機器人的基礎模塊
【「具身智能機器人系統」閱讀體驗】1.初步理解具身智能
開源項目!OpenCat—— 一個全能的平價四足機器人
七騰機器人:防爆輪式機器人-四輪八驅全新上線

【CW32開發】初探四足機器人

在NVIDIA Isaac Lab中訓練四足機器人運動






 工商網監
工商網監
評論