") 群體智能協(xié)同如何控制基于車路協(xié)同的交通系統(tǒng)
群體智能協(xié)同如何控制基于車路協(xié)同的交通系統(tǒng)
基于車路協(xié)同的復(fù)雜新型交通系統(tǒng)與傳統(tǒng)交通系統(tǒng)不可同日而語(yǔ),新型的交通系統(tǒng)的來臨,使我們面臨眾多挑戰(zhàn),我們必須采用群體智能協(xié)同控制的方式來解決開放的復(fù)雜的交通系統(tǒng)面臨的交通管控問題。
今年9月份,阿里巴巴、百度等一些大的互聯(lián)網(wǎng)公司先后發(fā)布了車路協(xié)同的戰(zhàn)略發(fā)展目標(biāo)和計(jì)劃,大公司這樣的一個(gè)動(dòng)作就突然把原來各研究機(jī)構(gòu)逐步發(fā)展的車路協(xié)同技術(shù)推向高潮。有人預(yù)測(cè)2018車路協(xié)同在市場(chǎng)上這樣的一個(gè)啟動(dòng),很可能會(huì)在2019年成為發(fā)展風(fēng)口,車路協(xié)同的大規(guī)模應(yīng)用和推廣已經(jīng)成為現(xiàn)代道路交通發(fā)展的必然選擇,但是目前還是會(huì)面臨一系列基礎(chǔ)研究的問題。
2011年科技部在863計(jì)劃設(shè)立主題項(xiàng)目“智能車路協(xié)同關(guān)鍵技術(shù)研究”。這也是“車路協(xié)同”名詞的來源。
“863”計(jì)劃:1986年3月,面對(duì)世界高技術(shù)蓬勃發(fā)展、國(guó)際競(jìng)爭(zhēng)日趨激烈的嚴(yán)峻挑戰(zhàn),***同志在王大珩、王淦昌、楊嘉墀和陳芳允四位科學(xué)家提出的“關(guān)于跟蹤研究外國(guó)戰(zhàn)略性高技術(shù)發(fā)展的建議”和朱光亞極力倡導(dǎo)下,做出“此事宜速作決斷,不可拖延”的重要批示。在充分論證的基礎(chǔ)上,黨中央、國(guó)務(wù)院果斷決策,于1986年11月啟動(dòng)實(shí)施了高技術(shù)研究發(fā)展計(jì)劃,簡(jiǎn)稱863計(jì)劃。
發(fā)展車路協(xié)同技術(shù)及其應(yīng)用已納入交通部智能交通系統(tǒng)發(fā)展戰(zhàn)略。
目前國(guó)家的在建項(xiàng)目有:新一代國(guó)家交通控制網(wǎng)和智慧公路試點(diǎn)工程/北京冬奧會(huì)、雄安新區(qū)項(xiàng)目等。
清華大學(xué)教授/自動(dòng)化系工程研究所所長(zhǎng)、國(guó)家“863”計(jì)劃先進(jìn)交通技術(shù)領(lǐng)域?qū)<覐堃懵暑I(lǐng)的團(tuán)隊(duì)自2011年就開始了車路協(xié)同技術(shù)的研究,本文是對(duì)他在國(guó)家智能產(chǎn)業(yè)峰會(huì)報(bào)告的整理。
車路協(xié)同與智能協(xié)同
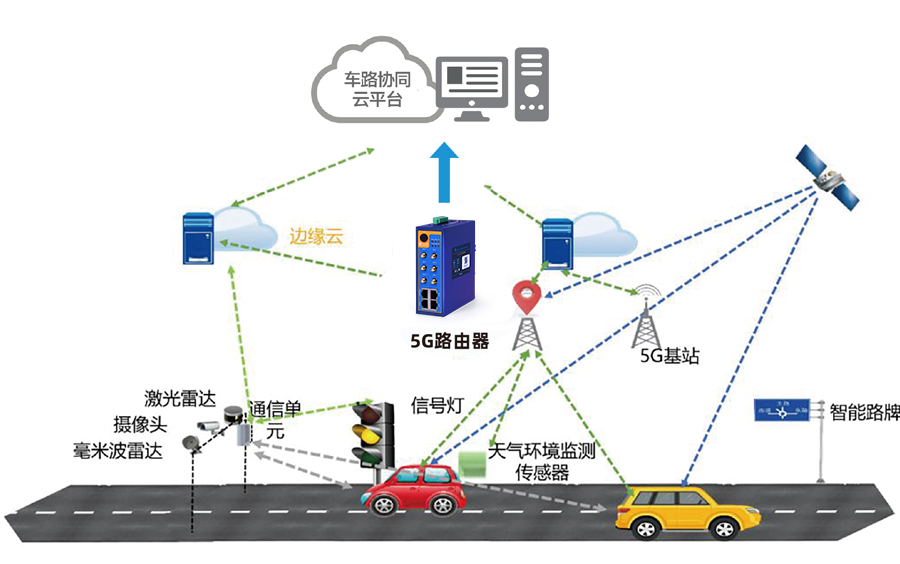
車路協(xié)同系統(tǒng)i-VICS (Intelligent Vehicle Infrastructure Cooperative Systems)是采用先進(jìn)的無(wú)線通信和新一代互聯(lián)網(wǎng)等技術(shù),全方位實(shí)施車車、車路和人車動(dòng)態(tài)實(shí)時(shí)信息交互,在全時(shí)空動(dòng)態(tài)交通信息采集與融合的基礎(chǔ)上,開展車輛協(xié)同安全和道路協(xié)同控制,充分實(shí)現(xiàn)人車路的有效協(xié)同,保證交通安全,提高通行效率,從而形成的安全、高效和環(huán)保的道路交通系統(tǒng)。
核心技術(shù)與功能有:①任何車輛任何時(shí)間任何地點(diǎn)互聯(lián);②全時(shí)空動(dòng)態(tài)交通信息采集與融合;③人車路的有效協(xié)同--協(xié)同安全(分為主動(dòng)安全和被動(dòng)安全)、協(xié)同控制(分為主動(dòng)控制和被動(dòng)控制)。

車路協(xié)同系統(tǒng)結(jié)構(gòu)
從上圖可以看出,系統(tǒng)通過各種無(wú)線通訊的方式,把車和車之間、車和路之間、近端和遠(yuǎn)端車之間、甚至人都可以構(gòu)成新的交通結(jié)構(gòu)。
這里幾個(gè)關(guān)鍵點(diǎn):車載設(shè)備、人手持設(shè)備、路測(cè)設(shè)備構(gòu)成一個(gè)新的結(jié)構(gòu),結(jié)構(gòu)的功能有:
設(shè)備性能:多模兼容
環(huán)境感知:協(xié)同感知
信息交互:可信交互
控制機(jī)制:動(dòng)態(tài)分層
計(jì)算實(shí)現(xiàn):邊緣云端
系統(tǒng)功能:升級(jí)延展
這些結(jié)構(gòu)組合在一起將產(chǎn)生非常大的變化,比如信息或獲取產(chǎn)生的革命性的變化,于是我們?cè)谒伎紗栴}的時(shí)候就不能再用傳統(tǒng)的方式來做,因此不同的領(lǐng)域做交通的同仁們就開始思考這個(gè)問題。于是大家回憶國(guó)內(nèi)近十年的發(fā)展過程,有些高頻詞是比較常見的,比如車聯(lián)網(wǎng)(Internet of Vehicle)、網(wǎng)聯(lián)車(Connected Vehicle)、蜂窩網(wǎng)聯(lián)(C-V2X)以及車路協(xié)同(i-VICS)方式。
當(dāng)然,最后交通部選擇了“車路協(xié)同”這個(gè)名稱,這其實(shí)也跟我們的國(guó)家的體制有關(guān)系,因?yàn)椴煌I(lǐng)域的叫法是從它的角度出發(fā)的。
雖然這幾個(gè)方面出發(fā)點(diǎn)是不一樣的,比如車聯(lián)網(wǎng)最早的發(fā)展是從物聯(lián)網(wǎng)出來的的,把車連起來就可以做,但是車聯(lián)網(wǎng)用到汽車?yán)镒钤绲氖菑膴蕵烽_始的,希望汽車在行駛過程中通過網(wǎng)絡(luò)傳遞娛樂的信息。這個(gè)市場(chǎng)沒有打開,發(fā)展過程中,大家發(fā)現(xiàn)車聯(lián)網(wǎng)更大的應(yīng)用是在交通里面,于是車聯(lián)網(wǎng)就變成和交通結(jié)合。
從這個(gè)例子中可以看出,出發(fā)點(diǎn)雖然可能不一樣,但是目前主要研究的領(lǐng)域都趨同了。

交通部副部長(zhǎng)劉小明在去年電動(dòng)汽車百人會(huì)上說:交通運(yùn)輸部高度重視自動(dòng)駕駛和車路協(xié)同等前瞻性技術(shù)的發(fā)展和應(yīng)用,以智慧交通建設(shè)為載體,按照車路協(xié)同發(fā)展的技術(shù)路徑,積極推進(jìn)自動(dòng)駕駛的發(fā)展。
因此,我們國(guó)家高度重視自動(dòng)駕駛和車路協(xié)同發(fā)展,這個(gè)技術(shù)路線確定了按照車路協(xié)同的技術(shù)路徑積極地推動(dòng)自動(dòng)駕駛的發(fā)展。即我們現(xiàn)在的所說的自動(dòng)駕駛以單車為智能體解決通過單車對(duì)環(huán)境的感知解決控制的問題要發(fā)生一些變化,走到另外一個(gè)技術(shù)路線,就是依賴于我們現(xiàn)在說車路協(xié)同的平臺(tái),對(duì)自動(dòng)駕駛汽車的原理性、控制的手段問題、系統(tǒng)的結(jié)構(gòu)問題都會(huì)產(chǎn)生一些變化。
比如說舉一個(gè)簡(jiǎn)單的例子自動(dòng)駕駛有一個(gè)挑戰(zhàn)是,過路口的時(shí)候要識(shí)別紅綠燈,但是會(huì)受到很多因素的影響如光照和遮擋等。眾所周知,視頻的識(shí)別可靠性最后的5%是很難提高的,但是如果這5%提高不上去對(duì)于自動(dòng)駕駛車輛通過路口就很困難。
但是車路協(xié)同平臺(tái)就可以解決這樣的問題,信號(hào)控制系統(tǒng)作為車路協(xié)同平臺(tái)中間作為一種典型的傳感器,可以把它信號(hào)發(fā)送出來,如果信號(hào)機(jī)能夠把紅燈和綠燈的狀態(tài)以及時(shí)間直接發(fā)給自動(dòng)駕駛汽車,就可以代替通過視頻判別信號(hào)燈的過程,就可以解決所謂最后5%準(zhǔn)確率的問題。
即不同的技術(shù)路線可以大大提高對(duì)交通可靠性要求,同時(shí)可以降低對(duì)一種技術(shù)的依賴性。
這樣還可以極大的解決成本的問題,比如我的團(tuán)隊(duì),從買車再改裝到上路40萬(wàn)就可以解決了。一年的經(jīng)驗(yàn),70多萬(wàn)就可以解決兩輛自動(dòng)駕駛汽車。但是有一個(gè)重要的前提就是基礎(chǔ)設(shè)施要支持我們的自動(dòng)駕駛汽車。

車路協(xié)同條件下的道路交通環(huán)境促使我們改變對(duì)傳統(tǒng)交通系統(tǒng)的認(rèn)知
在這樣情況下,新的挑戰(zhàn)也隨之而來,如上圖所示路網(wǎng)及所有道路上車輛連起來以后,使得傳統(tǒng)的交通里面只能依靠簡(jiǎn)單斷面來推演整個(gè)交通系統(tǒng)的時(shí)代過去了。
現(xiàn)在通過車路協(xié)同系統(tǒng)可以知道任何時(shí)間、任何斷面交通情況,任何車輛信息都可以獲取。
于是再這樣的情況下產(chǎn)生海量的信息,包括信息安全的問題。
在這個(gè)基礎(chǔ)上還會(huì)發(fā)現(xiàn)一個(gè)很重要的問題,就是全面信息撲面而來以后,我們發(fā)現(xiàn)系統(tǒng)結(jié)構(gòu)也會(huì)發(fā)生變化。即有了這樣一個(gè)結(jié)構(gòu)以后,我們發(fā)現(xiàn)交通系統(tǒng)里面就沒有邊界了。我們知道我們控制的系統(tǒng)目標(biāo)應(yīng)該是固定的。但是這樣的交通系統(tǒng)是無(wú)邊的,只要有人的地方就都有道路都有車輛,因此我們需要?jiǎng)澮粋€(gè)界限研究一個(gè)交通,如果要用傳統(tǒng)控制的方法去研究就會(huì)面臨新的挑戰(zhàn),傳統(tǒng)的交通理論就面臨一個(gè)新的變化,原先我們是用流體力學(xué)的方式研究傳統(tǒng)交通流量,但是現(xiàn)在需要換一種思路。
由于我們的車輛是離散的、是隨機(jī)的,所有的信息都可以獲取,于是我們需要從統(tǒng)計(jì)學(xué)的角度隨機(jī)統(tǒng)計(jì)的效果去建立一套新的交通流理論,這是我們面臨的重要挑戰(zhàn)問題之一。
到底有那些具體的挑戰(zhàn)?

第一個(gè)挑戰(zhàn)是交通系統(tǒng)屬性發(fā)生了變化。原來的傳統(tǒng)的交通系統(tǒng)我們是用流體學(xué)來檢測(cè)交通流量,這個(gè)時(shí)候沒有辦法關(guān)心的每部汽車,當(dāng)然并不是我們不想關(guān)心,而是之前沒有手段關(guān)心。現(xiàn)在車路協(xié)同以后,所有車輛里面的原本在傳統(tǒng)交通系統(tǒng)中不顯現(xiàn)特性現(xiàn)在凸現(xiàn)出來了,如自組織、網(wǎng)絡(luò)化、非線性、強(qiáng)耦合、泛隨機(jī)及異粒度,這時(shí)我們?cè)谟脗鹘y(tǒng)交通流的方法研究已經(jīng)不適應(yīng)了。
第二個(gè)挑戰(zhàn)是交通的組織成分發(fā)生的變化。隨著車路協(xié)同的發(fā)展,我們就會(huì)有網(wǎng)聯(lián)汽車的進(jìn)步,在這個(gè)情況,一部分是完全靠人自己決定的,一部分可以通過網(wǎng)絡(luò)獲得信息的,增加的成分問題,現(xiàn)在自動(dòng)駕駛引進(jìn)來了,更可怕的是將來自動(dòng)駕駛車和人駕駛車放在一塊,而且是長(zhǎng)期共存的情況下,交通成分發(fā)生變化以后,這個(gè)時(shí)候?qū)ξ覀冋麄€(gè)挑戰(zhàn)發(fā)生了大的影響,我們的模型已經(jīng)不能像以前那樣單純了,更加復(fù)雜了,我們的組織成分發(fā)生了變化。
第三個(gè)挑戰(zhàn)是交通系統(tǒng)沒有邊界了。以前我們可以切一個(gè)界面研究哪幾輛車,現(xiàn)在行不通了,在研究過程中我們發(fā)現(xiàn)按照交通的結(jié)構(gòu),交通系統(tǒng)里面沒有了主次之分,所有的車都是平等的,沒有統(tǒng)一目標(biāo),所有民用車輛全是分散目標(biāo)。三是系統(tǒng)沒有邊界,找不到邊在那兒,只要有人存在的地方就有交通系統(tǒng),是當(dāng)做開放的復(fù)雜系統(tǒng)去研究。
第四個(gè)挑戰(zhàn)是用什么樣的結(jié)構(gòu)去研究新的交通系統(tǒng)。總體層面上這里列出來泛在分布式,但是在情景驅(qū)動(dòng)下的動(dòng)態(tài)集中式,我們現(xiàn)在研究集中控制被動(dòng)成分是固定的,大家知道求優(yōu)化目標(biāo)的時(shí)候,SI中的I是固定的,從1到N中的N是固定的,但是在交通里面不是這樣,比如在路口通行過程中間,在情景化過程當(dāng)中要研究在一定范圍內(nèi)有一百個(gè)汽車的時(shí)候,這個(gè)時(shí)候一百個(gè)汽車到下一個(gè)時(shí)刻五六輛就出去了,然后又進(jìn)來了三四輛汽車,在求優(yōu)化目標(biāo)的時(shí)候就發(fā)生一個(gè)新的挑戰(zhàn),沒有辦法用傳統(tǒng)的求優(yōu)化問題的方式來解決它,這樣的情況下這就是我們的挑戰(zhàn)。
那怎么才能解決這樣的挑戰(zhàn)呢?在這個(gè)情況下必須采用群體智能協(xié)同控制的方式來解決開放的復(fù)雜的交通系統(tǒng)面臨的交通管控問題,隨著這樣的發(fā)展,而且交通的協(xié)同管控的需求擺在面前我們必須研究相關(guān)的基礎(chǔ)和關(guān)鍵技術(shù)問題。
群體智能與協(xié)同控制
下面從四個(gè)方面的分析群體智能和協(xié)同控制該怎樣實(shí)現(xiàn)。
一、基于車路協(xié)同的群體智能協(xié)同控制系統(tǒng)——分析

智能協(xié)同控制機(jī)制與主要內(nèi)容
首先我們來分析一下系統(tǒng)的結(jié)構(gòu)有哪些是與傳統(tǒng)的不一致。首先,控制對(duì)象發(fā)生了變化,如果是泛在的分布式,那么在很大的范圍內(nèi)是不變的,但是系統(tǒng)結(jié)構(gòu)太大了,如果大范圍去研究它的話就會(huì)出現(xiàn)一個(gè)很大的問題,就是在求優(yōu)化、求解的過程中是超高維的計(jì)算問題,而要解決超高維計(jì)算的問題是非常困難的。
其次,如果不考慮泛在分布問題,而考慮在情景驅(qū)動(dòng)下集中式的時(shí)候,比如一百個(gè)對(duì)象,這一秒鐘是這一百個(gè),下一秒鐘變成不是一百個(gè),怎么在連續(xù)過程求最優(yōu)過程,這是在算法上面的挑戰(zhàn)。
還有問題就是在實(shí)現(xiàn)途徑的問題,即便算法非常好,真正用到解決交通實(shí)際問題的時(shí)候,是要考慮實(shí)現(xiàn)途徑的問題的。首先就是路權(quán)分配問題、路徑優(yōu)化問題以及系統(tǒng)局部的協(xié)同問題。
以及決策信息的協(xié)同學(xué)的問題,主要用協(xié)同學(xué)的方法做多功能優(yōu)化,目標(biāo)發(fā)生變化的問題,以及在決策過程中近程怎么解決,遠(yuǎn)程怎么解決,范圍怎么確定等等。
我們還要考慮到實(shí)現(xiàn)手段,交通系統(tǒng)是一個(gè)逐漸發(fā)展的過程,包括車路協(xié)同,包括智能網(wǎng)聯(lián)汽車,在變化過程當(dāng)中所有的理論和方法的應(yīng)用怎么落地,如果不能落地,技術(shù)就死在那里,所以我們要解決現(xiàn)在具體問題速度引導(dǎo)到半自動(dòng)的控制問題以及到全自動(dòng)控制問題,在整個(gè)發(fā)展過程中技術(shù)方案都必須發(fā)揮作用才能發(fā)展全面。
二、基于車路協(xié)同的群體智能控制系統(tǒng)實(shí)現(xiàn)——感知

基于交通大數(shù)據(jù)的人車狀態(tài)感知/運(yùn)動(dòng)態(tài)勢(shì)演化/路網(wǎng)運(yùn)能評(píng)價(jià)
感知方面也會(huì)發(fā)生非常大的變化,傳統(tǒng)的感知都是通過一個(gè)或者少量傳感器對(duì)斷面進(jìn)行分析。或者對(duì)網(wǎng)絡(luò)狀態(tài)分析的時(shí)候,我們不只是為了一個(gè)目標(biāo)去做,現(xiàn)在在新的車路協(xié)同環(huán)境下,新的信息發(fā)生變化以后,我們可以做協(xié)同分析。所以感知從原來的單一的少量的信息融合要跨越到協(xié)同感知問題。即同樣一個(gè)目標(biāo)的感知,要用多輛汽車或者路側(cè)設(shè)備共同決策感知是什么樣的。這樣也會(huì)大大增強(qiáng)我們對(duì)環(huán)境感知能力的提高。
原來單車的自動(dòng)駕駛是靠車上的傳感器來判斷路上所有的物體,這個(gè)時(shí)候變了,被感知車前面有輛汽車,后面有輛汽車,旁邊還有一個(gè)路側(cè)設(shè)備,用三個(gè)檢測(cè)它的設(shè)備獲取更全面的信息。
再這樣的情況下,在群體協(xié)同行為在感知中間發(fā)生很多的變化。這里還有個(gè)運(yùn)動(dòng)態(tài)勢(shì)問題,傳統(tǒng)的交通如果是個(gè)元函數(shù),運(yùn)動(dòng)狀態(tài)要做一個(gè)運(yùn)動(dòng)的變化,運(yùn)動(dòng)態(tài)勢(shì)是什么?一階的要求它的導(dǎo)數(shù),再要看決策的預(yù)測(cè)問題,就是二階導(dǎo)數(shù),按數(shù)學(xué)的簡(jiǎn)單解釋就是這樣的。在現(xiàn)實(shí)交通里面通過信息的感知實(shí)現(xiàn)這樣的結(jié)果是不容易,這也是另外一個(gè)創(chuàng)新點(diǎn),我們希望能借著車路協(xié)同現(xiàn)在獲得的交通信息層面上能不能對(duì)傳統(tǒng)的感知升級(jí)形成一個(gè)協(xié)同的感知問題。
三、基于車路協(xié)同的群體智能控制系統(tǒng)實(shí)現(xiàn)——控制

混合交通群體協(xié)同決策與優(yōu)化控制理論方法
控制就是要解決實(shí)際問題,我們要從微觀的車輛、中觀的車隊(duì)、宏觀整個(gè)區(qū)域的新的交通流的研究,同時(shí)結(jié)合路權(quán)分配問題、路徑優(yōu)化問題、協(xié)同優(yōu)化問題等解決一系列控制問題,在快速道路和城市道路上混合人工與自動(dòng)駕駛混駕的情況下,形成新的群體協(xié)同決策與控制理論及方法體系。
四、基于車路協(xié)同的群體智能控制系統(tǒng)實(shí)現(xiàn)——計(jì)算

解決這個(gè)問題的關(guān)鍵計(jì)算結(jié)構(gòu)就是要把邊緣計(jì)算和局部計(jì)算加云端計(jì)算結(jié)合起來,在這樣的復(fù)雜新型交通系統(tǒng)里面才能很好的解決協(xié)同和控制問題。邊緣計(jì)算主要是車載;局部的是情景中的集中部分,比如說路側(cè)的信號(hào)燈為核心的路測(cè)協(xié)調(diào)系統(tǒng);云端的就是中心。三者結(jié)合形成有機(jī)的計(jì)算平臺(tái)。分配好計(jì)算任務(wù)才能解決問題。
以上就是從四個(gè)方面的分析智能協(xié)同和協(xié)同控制怎么實(shí)現(xiàn)。
解決方案與應(yīng)用實(shí)現(xiàn)
最后有個(gè)形象的解釋,到底怎么能實(shí)現(xiàn)這個(gè)問題,現(xiàn)在不是說不能實(shí)現(xiàn),已經(jīng)有一定的基礎(chǔ),在國(guó)內(nèi)的有多個(gè)企業(yè)已經(jīng)有技術(shù)產(chǎn)品和技術(shù)的系統(tǒng)方案,包括像我星云互聯(lián)、華為等也在做這樣的解決方案,能夠滿足車輛之間的所有的信息交互,保證實(shí)施性和可靠性,現(xiàn)實(shí)中基本平臺(tái)有了,缺的是決策的機(jī)制,缺的是控制協(xié)同的方法和理論。
現(xiàn)階段,國(guó)家所有測(cè)試系統(tǒng)里面單車速度引導(dǎo)(交叉路口 + 高速路可變速度引導(dǎo))、特殊車輛壁讓(警車、救護(hù)車、消防車)、安全預(yù)警(盲區(qū)、危險(xiǎn)車輛、駕駛行為)依托這三種特性,展開的各種測(cè)試場(chǎng)景。
再往此后,由于群控制的一些辦法,我們會(huì)發(fā)現(xiàn)有新的一些變化,比如說信號(hào)燈控制、車流引導(dǎo)/控制 + 配時(shí)調(diào)整、快速路控制、穩(wěn)態(tài)流引導(dǎo)/控制(快速路可變速度控制)、城市公交優(yōu)化控制、公交與信號(hào)控制協(xié)同(新型城市公交優(yōu)先控制)、不同滲透率下混合交通管控、自然駕駛與網(wǎng)聯(lián)駕駛混駕、自然駕駛網(wǎng)聯(lián)駕駛與智能駕駛混駕、人工駕駛與自動(dòng)駕駛混駕等。
-
自動(dòng)駕駛
+關(guān)注
關(guān)注
788文章
14182瀏覽量
169380
原文標(biāo)題:基于車路協(xié)同的群體智能協(xié)同
文章出處:【微信號(hào):IV_Technology,微信公眾號(hào):智車科技】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
智慧路燈桿如何實(shí)現(xiàn)車路協(xié)同輔助自動(dòng)駕駛?
智能交通的關(guān)鍵技術(shù)支撐
智能網(wǎng)聯(lián)和車路協(xié)同有何區(qū)別?誰(shuí)更具優(yōu)勢(shì)?
2025年,為什么車路協(xié)同“降溫了”?
車路云協(xié)同如何讓Robotaxi加速實(shí)現(xiàn)
V2X車路協(xié)同系統(tǒng)

V2X車路協(xié)同系統(tǒng)

V2X車路協(xié)同系統(tǒng)

智能車路協(xié)同試驗(yàn)車開發(fā)服務(wù)

智慧綜合桿路燈與物聯(lián)網(wǎng)融合與發(fā)展 車路協(xié)同——探索智慧路燈系統(tǒng)的無(wú)限可能

雷森受邀參與新一代“車路云未來交通”技術(shù)沙龍活動(dòng)
智慧交通:實(shí)現(xiàn)智能交通管理的新方向
5G工業(yè)路由器在智慧交通車路協(xié)同應(yīng)用的深度解析
車路云協(xié)同,這次它真的來了嗎?






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論