") RAIL:風(fēng)險厭惡模仿學(xué)習(xí)算法方案
RAIL:風(fēng)險厭惡模仿學(xué)習(xí)算法方案
聲明:本文內(nèi)容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場。文章及其配圖僅供工程師學(xué)習(xí)之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問題,請聯(lián)系本站處理。
舉報投訴
-
算法
+關(guān)注
關(guān)注
23文章
4700瀏覽量
94789 -
intel
+關(guān)注
關(guān)注
19文章
3493瀏覽量
187999 -
應(yīng)用程序
+關(guān)注
關(guān)注
38文章
3322瀏覽量
58754
發(fā)布評論請先 登錄
相關(guān)推薦
熱點推薦
基于RV1126開發(fā)板實現(xiàn)自學(xué)習(xí)圖像分類方案
在RV1126開發(fā)板上實現(xiàn)自學(xué)習(xí):在識別前對物體圖片進行模型學(xué)習(xí),訓(xùn)練完成后通過算法分類得出圖像的模型ID。
方案設(shè)計邏輯流程圖,方案

基于 NXP NCJ29D5D UWB 定位算法方案
基于NXP NCJ29D5D UWB技術(shù)的定位算法方案,通過三個Anchor實現(xiàn)與Key Fob之間的精準范圍定位。BCM與Anchor間通過CAN Bus傳輸數(shù)據(jù),由MCU(S32K144)運行
中偉視界:解密AI智能攝像機算法,讓傳送帶跑偏檢測更高效!
AI智能攝像機在傳輸帶跑偏檢測中展現(xiàn)出巨大潛力。通過本地檢測和靈活下發(fā)不同的AI算法,可以實現(xiàn)對跑偏故障的實時監(jiān)控,提升生產(chǎn)安全與效率。企業(yè)應(yīng)結(jié)合實際需求,選擇合適的攝像機和算法方案,推動工業(yè)自動化進程。

ADA4511-2: Precision, 40 V, Rail-to-Rail Input and Output Op Amp with DigiTrim Data Sheet adi
電子發(fā)燒友網(wǎng)為你提供ADI(ADI)ADA4511-2: Precision, 40 V, Rail-to-Rail Input and Output Op Amp with DigiTrim
發(fā)表于 01-15 18:47

泰雷茲發(fā)布數(shù)據(jù)風(fēng)險智能解決方案
近日,泰雷茲公司正式推出了其創(chuàng)新性的數(shù)據(jù)風(fēng)險智能解決方案(Data Risk Intelligence),該方案基于Imperva數(shù)據(jù)安全平臺(DSF)構(gòu)建,旨在為企業(yè)提供全面的數(shù)據(jù)風(fēng)險
智能工具視頻特輯上線!5分鐘速通AI視覺算法方案和模型構(gòu)建
、多、雜,這往往需要多個算法模塊的協(xié)同作業(yè),AI算法方案的復(fù)雜度極高。在實際操作中,常常會遇到工程數(shù)量龐大、模塊管理混亂、結(jié)果匯總困難等問題,這無疑進一步加大了開

NPU與機器學(xué)習(xí)算法的關(guān)系
在人工智能領(lǐng)域,機器學(xué)習(xí)算法是實現(xiàn)智能系統(tǒng)的核心。隨著數(shù)據(jù)量的激增和算法復(fù)雜度的提升,對計算資源的需求也在不斷增長。NPU作為一種專門為深度學(xué)習(xí)等機器
如何制定一套優(yōu)質(zhì)的工業(yè)視覺檢測算法方案?
很難與當下主流的AI平臺工具配型,或者是通過單一算法模型進行訓(xùn)練,通常情況下,工業(yè)視覺檢測項目面臨著一系列獨特的難點與挑戰(zhàn)。比如:算法實現(xiàn)難。工業(yè)環(huán)境中的背景往往非
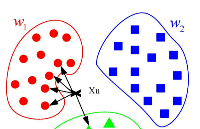
【每天學(xué)點AI】KNN算法:簡單有效的機器學(xué)習(xí)分類器
過程,其實就是一個簡單的分類問題,而KNN(K-NearestNeighbors)算法正是模仿這種人類決策過程的機器學(xué)習(xí)算法。|什么是KNN?KNN(K-NearestNeighbo
深度學(xué)習(xí)算法在嵌入式平臺上的部署
隨著人工智能技術(shù)的飛速發(fā)展,深度學(xué)習(xí)算法在各個領(lǐng)域的應(yīng)用日益廣泛。然而,將深度學(xué)習(xí)算法部署到資源受限的嵌入式平臺上,仍然是一個具有挑戰(zhàn)性的任務(wù)。本文將從嵌入式平臺的特點、深度
深度學(xué)習(xí)算法在集成電路測試中的應(yīng)用
隨著半導(dǎo)體技術(shù)的快速發(fā)展,集成電路(IC)的復(fù)雜性和集成度不斷提高,對測試技術(shù)的要求也日益增加。深度學(xué)習(xí)算法作為一種強大的數(shù)據(jù)處理和模式識別工具,在集成電路測試領(lǐng)域展現(xiàn)出了巨大的應(yīng)用潛力。本文將從深度學(xué)習(xí)
利用Matlab函數(shù)實現(xiàn)深度學(xué)習(xí)算法
在Matlab中實現(xiàn)深度學(xué)習(xí)算法是一個復(fù)雜但強大的過程,可以應(yīng)用于各種領(lǐng)域,如圖像識別、自然語言處理、時間序列預(yù)測等。這里,我將概述一個基本的流程,包括環(huán)境設(shè)置、數(shù)據(jù)準備、模型設(shè)計、訓(xùn)練過程、以及測試和評估,并提供一個基于Matlab的深度
深度學(xué)習(xí)的基本原理與核心算法
處理、語音識別等領(lǐng)域取得了革命性的突破。本文將詳細闡述深度學(xué)習(xí)的原理、核心算法以及實現(xiàn)方式,并通過一個具體的代碼實例進行說明。
機器學(xué)習(xí)算法原理詳解
機器學(xué)習(xí)作為人工智能的一個重要分支,其目標是通過讓計算機自動從數(shù)據(jù)中學(xué)習(xí)并改進其性能,而無需進行明確的編程。本文將深入解讀幾種常見的機器學(xué)習(xí)算法原理,包括線性回歸、邏輯回歸、支持向量機
機器學(xué)習(xí)的經(jīng)典算法與應(yīng)用
關(guān)于數(shù)據(jù)機器學(xué)習(xí)就是喂入算法和數(shù)據(jù),讓算法從數(shù)據(jù)中尋找一種相應(yīng)的關(guān)系。Iris鳶尾花數(shù)據(jù)集是一個經(jīng)典數(shù)據(jù)集,在統(tǒng)計學(xué)習(xí)和機器學(xué)習(xí)領(lǐng)域都經(jīng)常被






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論