") 三指機器爪制作教程
三指機器爪制作教程

制作難度:★★★☆☆
GEEK指數(shù):★★★★☆
以下是這次的制作……爪子。
“爪子”就是我發(fā)明的超酷三指機器人爪子。它通過一臺伺服電機進行控制,并且可以通過安裝另一臺伺服電機,將其作為“手腕”來使用。
1 工具和材料
● 激光切割機
● 一臺電鉆
● 一臺伺服電機
● 膠水
○ 3×3 毫米的螺栓
○ 3×3 毫米的尼龍防松螺母
○ 4×4 毫米的螺栓
○ 4×4 毫米的螺母
○ 一些多芯線
○ 一些 3mm 的榫釘
○ 3 個小的拉力彈簧
2 激光切割零件
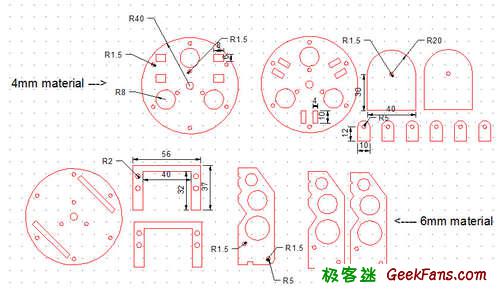
下面附上了用于激光切割的DXF格式圖紙。這張圖紙非常清晰明了。如果你無法使用激光切割機,那么下面還附上了設(shè)計方案。
3 組裝底座
你手頭應(yīng)該有3塊圓形的底板。其中一塊的內(nèi)部有兩個長長的矩形槽,先把它放到一邊。將另外兩塊底板用膠水粘起來,確保所有的孔都相互對準(zhǔn)。我用螺栓來確保這些孔在一條線上。
4 添加鉗夾支架
將6塊最小的零件用膠水粘到底板上,確保它們都確確實實地站直了。
5 安裝伺服電機支架
將伺服電機用4毫米的螺栓和螺母固定在兩個伺服電機支架的其中一個上。接著,將底板翻過來,把兩個支架用膠水粘上去。
6 添加榫釘
切割出6根50毫米長的直徑3毫米的榫釘。將它們插入兩塊底板上的6個靠外的孔中,并且穿過去,讓它們的頂端與伺服電機所在的反面相齊平。我發(fā)現(xiàn)用削鉛筆的小刀來刮削榫釘?shù)捻敹丝梢院芊奖愕乇WC它們與底板齊平。
7 添加第三塊底板
每隔一根榫釘,將3個彈簧鉤在榫釘上,確保它們正對著3對鉗夾支架的當(dāng)中。然后,將第三塊底板壓在榫釘上。
8 用膠水固定“腕部”支架
用膠水把兩個“腕部”零件粘在第三塊底板上。
(抱歉我沒有合適的照片,我貌似忘記拍了。)
9 添加鉗夾
水平地在最靠近中央的孔中鉆一個小孔。并且將另一個孔的每一個面都銼一下,好讓彈簧能自由伸縮。然后,把一根線伸到孔中,接著從另一側(cè)拉出來。在線的末端打一個結(jié),然后將它重新推回孔中。接著,將各個鉗夾用螺栓和尼龍防松螺母固定在鉗夾支架上。
10 大功告成
將彈簧的一頭彎到足以貼合孔的邊緣,然后再把它彎回到原來的位置。讓3根鉗夾線從中央的孔中穿過,然后穿過伺服電機頂部的孔,將它們系緊。
11 享受樂趣!
這個爪子可以安裝在另一臺伺服電機上,形成一個手腕。伺服電機應(yīng)該能拖動那些線,從而將爪子收緊。當(dāng)伺服電機朝反方向反旋轉(zhuǎn)時,這些爪子應(yīng)該會受到彈簧的彈力而張開。
12 健康與安全事項
警告,爪子有可能會活過來,把你的魂給吃了。還有,你可能會發(fā)現(xiàn)有什么小孩子或者寵物突然被抓走了。
-
機器人
+關(guān)注
關(guān)注
213文章
29664瀏覽量
212413
發(fā)布評論請先 登錄
桁架機器人的卡爪怎么維護?
機械臂+末端夾爪完整構(gòu)成了人類手臂
MAKEBLOCK單伺服電機控制的機械爪的資料介紹

什么是工業(yè)機器人夾爪它有什么用

工業(yè)機器人搭配伺服電動夾爪的五大優(yōu)勢
讓三爪卡盤實現(xiàn)六爪夾持的方法
眾多場景逐漸衍生出電動夾爪替代氣動夾爪的新機會
金器工業(yè):打造集成型機器人末端夾爪
電動夾爪的賽道能有多大
慧靈六軸機械臂和電動夾爪,適配全自動粉面&烘焙機器人

機器人制作軟爪時要注意什么?

電動夾爪的運動控制方案






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論