") 智能駕駛汽車仿真測(cè)試案例分析
智能駕駛汽車仿真測(cè)試案例分析
智能駕駛是當(dāng)前汽車行業(yè)的研究熱點(diǎn)。智能駕駛概念涵蓋了傳統(tǒng)的高級(jí)駕駛輔助系統(tǒng)(ADAS)以及全自動(dòng)駕駛系統(tǒng)(SAE Level 3及以上級(jí)別)。由于智能駕駛系統(tǒng)的復(fù)雜性,仿真測(cè)試驗(yàn)證成為智能駕駛系統(tǒng)開(kāi)發(fā)流程中必不可少的一個(gè)環(huán)節(jié)。
智能駕駛系統(tǒng)一般包括環(huán)境感知、智能決策及車輛控制三個(gè)部分,相應(yīng)的,智能駕駛仿真測(cè)試環(huán)境需要包括道路交通場(chǎng)景仿真、車輛動(dòng)力學(xué)仿真及傳感器仿真。
系統(tǒng)特點(diǎn)
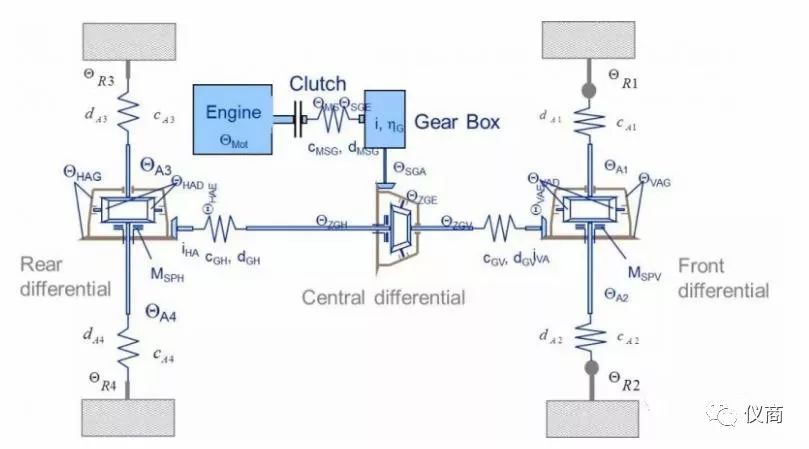
1車輛動(dòng)力學(xué)仿真
動(dòng)力傳動(dòng)系統(tǒng):可以模擬傳統(tǒng)發(fā)動(dòng)機(jī)動(dòng)力系統(tǒng)、純電驅(qū)動(dòng)系統(tǒng)、混合動(dòng)力系統(tǒng)、四輪驅(qū)動(dòng)系統(tǒng)等多種形式
底盤系統(tǒng):包括多種形式的懸架模型、復(fù)雜輪胎模型、轉(zhuǎn)向系統(tǒng)模型、液壓/氣壓制動(dòng)系統(tǒng)模型以及多體車身動(dòng)力學(xué)(縱向、側(cè)向、垂向)模型
2道路仿真
允許手動(dòng)搭建各種類型的道路,支持OpenDrive標(biāo)準(zhǔn)高精度道路格式、支持OpenCRG高精度路面描述格式
支持復(fù)雜路網(wǎng)結(jié)構(gòu):三岔路口、十字路口、立交橋等
支持直接導(dǎo)入高精地圖數(shù)據(jù)生成與真實(shí)道路高度一致的虛擬道路
3交通仿真
可以模擬各種類型機(jī)動(dòng)車、行人、動(dòng)物等交通物體
可以自定義每個(gè)交通物體的駕駛行為,包括路徑規(guī)劃、速度控制、換道等,支持事件觸發(fā)模式
可以生成符合交通規(guī)則的隨機(jī)交通流
4環(huán)境仿真
可以模擬晴天、多云、陰天、雨、雪等天氣
可以模擬白天、黑夜等多種光照條件
5環(huán)境感知傳感器仿真
對(duì)各類傳感器均可提供理想環(huán)境感知傳感器模型,直接輸出目標(biāo)級(jí)信息,包括交通物體的類型、位置、速度等信息,道路相關(guān)信息、交通標(biāo)志信息等
毫米波雷達(dá)仿真:可提供雷達(dá)回波模擬器系統(tǒng),可集成真實(shí)毫米波雷達(dá)進(jìn)行測(cè)試
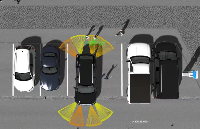
攝像頭:支持直接輸出攝像頭捕捉到的圖像,提供視頻暗箱或者圖像直接注入兩種HIL仿真方式。
激光雷達(dá):支持輸出點(diǎn)云數(shù)據(jù)
超聲波雷達(dá):提供超聲波回波模擬和芯片信號(hào)級(jí)模擬兩種HIL仿真方式
支持多傳感器融合
系統(tǒng)應(yīng)用領(lǐng)域
ADAS決策及控制算法(AEB、ACC、APA、LKA等)的開(kāi)發(fā)與驗(yàn)證
自動(dòng)駕駛決策及控制的開(kāi)發(fā)與驗(yàn)證
毫米波雷達(dá)功能測(cè)試和性能測(cè)試
圖像感知算法的開(kāi)發(fā)
激光雷達(dá)點(diǎn)云數(shù)據(jù)處理算法的開(kāi)發(fā)
-
傳感器
+關(guān)注
關(guān)注
2562文章
52524瀏覽量
763397 -
智能駕駛
+關(guān)注
關(guān)注
4文章
2773瀏覽量
49668 -
毫米波雷達(dá)
+關(guān)注
關(guān)注
107文章
1082瀏覽量
65147
原文標(biāo)題:智能駕駛汽車仿真測(cè)試案例
文章出處:【微信號(hào):IV_Technology,微信公眾號(hào):智車科技】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
5月22日技術(shù)直播分享 | 智能底盤電控產(chǎn)品仿真測(cè)試解決方案

新能源車軟件單元測(cè)試深度解析:自動(dòng)駕駛系統(tǒng)視角
智能駕駛場(chǎng)地和道路測(cè)試服務(wù)

虛擬駕駛仿真測(cè)試解決方案
智能座艙HIL仿真測(cè)試解決方案

智能駕駛HIL仿真測(cè)試解決方案

面向教學(xué)科研智能網(wǎng)聯(lián)汽車仿真測(cè)試實(shí)驗(yàn)室

智能座艙與智能駕駛技術(shù)演進(jìn)分析

基于V2X和自動(dòng)駕駛HIL聯(lián)調(diào)的仿真測(cè)試系統(tǒng)開(kāi)發(fā)

智能網(wǎng)聯(lián)汽車仿真測(cè)試標(biāo)準(zhǔn)體系研究

同星智能榮獲智駕仿真技術(shù)杰出方案獎(jiǎng),CTO謝樂(lè)寅博士入選首批ASAM專家?guī)斐蓡T

設(shè)計(jì)仿真 | 基于VTD的智能大燈仿真測(cè)試方案
NVIDIA賦能理想汽車共同推進(jìn)智能駕駛和智能座艙技術(shù)創(chuàng)新
自動(dòng)駕駛仿真測(cè)試實(shí)踐:高精地圖仿真






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論