 自動駕駛仿真測試實踐:高精地圖仿真
自動駕駛仿真測試實踐:高精地圖仿真
作者 | 小林
小編 | 不吃豬頭肉 引言
引言
隨著自動駕駛技術的快速發展,基于高精地圖的自動駕駛功能已初步落地應用,并持續迭代升級。在研發測試階段,多方面因素導致測試人員可能無法拿到控制器內部高精地圖對應的OpenDRIVE文件①,使得仿真場景與控制器內部高精地圖無法完全匹配,自動駕駛功能受限,得不到有效的測試驗證;而實車道路測試風險和成本高、周期長、覆蓋度低等問題,很難保證自動駕駛系統的可靠性和安全性。
針對這一核心技術痛點,本文提出了基于外部數據注入的高精地圖仿真方案,提高自動駕駛功能研發階段的測試有效性,可以大幅降低實車道路測試的風險和成本,加速自動駕駛功能的研發和部署,確保自動駕駛系統的可靠性和安全性。 什么是高精地圖?
什么是高精地圖?
高精地圖,很容易被誤解為相對于普通的導航電子地圖精度更高的一種地圖,實則兩者有著完全不同的含義。
導航地圖(SD MAP),是一種面向駕駛員使用的電子地圖,它存儲的主要是道路級別元素信息,如道路形狀等,精度為5m-10m左右。
高精地圖(HD MAP),是一種專為自動駕駛汽車設計的地圖,它擁有精確(厘米級精度)的車輛位置信息和豐富的道路元素數據信息,如交通標志、地面標志、車道線、信號燈以及道路坡度、曲率等,可以幫助汽車預知路面復雜信息,是實現自動駕駛功能的關鍵技術之一,主要體現在一下幾個方面:
1)精確定位:高精度地圖提供了精確的道路信息和地標數據,幫助車輛實現精確定位,包括車輛當前位置等信息。
2)環境感知:基于高精度地圖數據,車輛能夠更準確地感知周圍環境,包括道路標志、交通信號、障礙物等,從而提高交通場景的感知能力。
3)路徑規劃:高精度地圖為自動駕駛系統提供了詳細的道路網絡數據,幫助系統規劃最優路徑,避開擁堵區域,優化行駛路線。
4)決策制定:基于高精度地圖和環境感知數據,自動駕駛系統可以進行智能決策,比如避讓障礙物、調整車速、安全變道等,以確保行駛安全。
 高精地圖仿真方案
高精地圖仿真方案
在搭建虛擬仿真環境進行自動駕駛功能測試驗證過程中,需要確保仿真場景地圖和自動駕駛控制器內部高精地圖完全重合(車道級精度:誤差小于1cm),提高車輛的定位精確性、傳感器模型輸出的道路元素信息與高精地圖匹配性,才能保證自動駕駛控制器融合定位及環境感知結果準確,為路徑規劃和決策制定提供精確的輸入信息,提高自動駕駛功能研發階段的測試有效性。
不同的測試背景及需求對應不同的仿真方案:
方案一:如測試人員拿到控制器內部高精地圖對應的OpenDRIVE文件時,可以采用基于OpenDRIVE文件的定位仿真,簡單有效。方案二:針對無法拿到對應OpenDRIVE文件的情況(方案一失效),北匯信息創新地提出基于外部數據注入的高精地圖仿真解決方案。
方案一基于OpenDRIVE文件的定位仿真方案
當測試人員能夠拿到控制器內部高精地圖對應的OpenDRIVE文件時,直接將OpenDRIVE文件導入到場景仿真軟件中,自動生成高精地圖中交通標志、地面標志、車道線、信號燈以及道路坡度、曲率等信息;仿真流程如下圖所示:
1)VTD(場景仿真軟件)可輸出精確的車輛位置信息(UTM坐標系),并通過Ethernet送至CANoe(測試管理軟件)。
2)CANoe(測試管理軟件)解析車輛原始坐標進行加偏處理(坐標轉換),即UTM坐標系->WGS84坐標系->GCJ02坐標系,并通過Ethernet/CANFD發送至控制器。
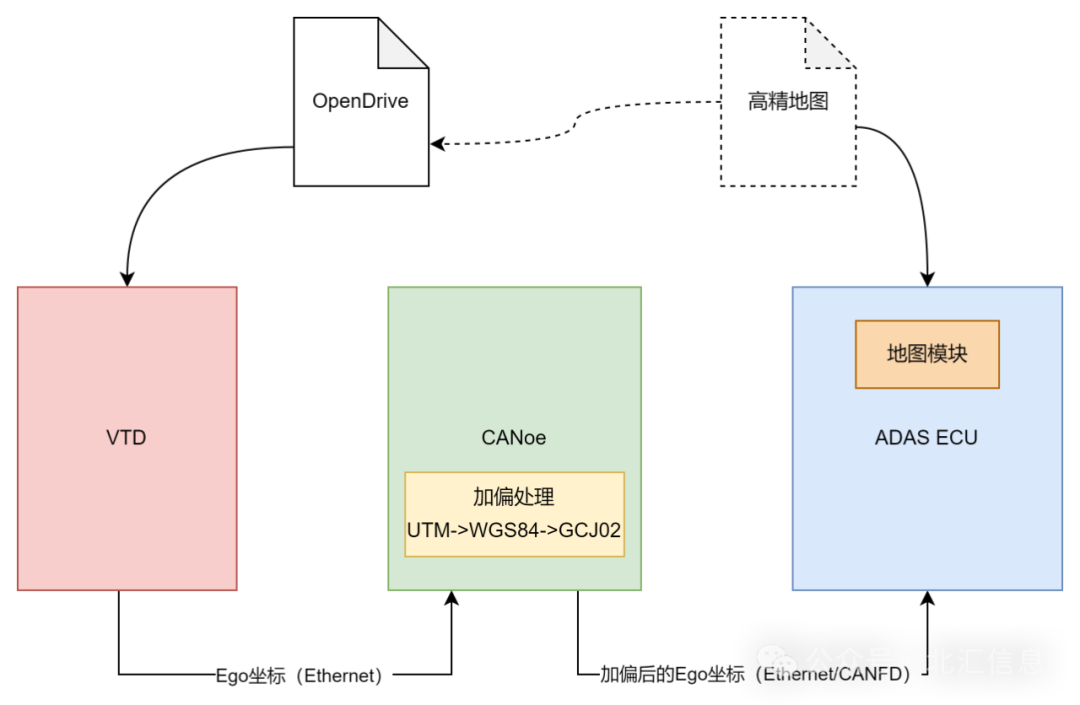 圖2 基于OpenDRIVE文件的定位仿真原理圖 方案二基于外部數據注入的高精地圖仿真方案
圖2 基于OpenDRIVE文件的定位仿真原理圖 方案二基于外部數據注入的高精地圖仿真方案
當測試人員拿不到控制器內部高精地圖對應的OpenDRIVE文件時,無法保證仿真場景地圖與控制器內部高精地圖完全匹配,自動駕駛功能受限。因此,針對自動駕駛仿真測試,提出基于外部數據注入的高精地圖仿真方案,使得控制器內部地圖數據與仿真場景中的道路元素信息一致,如下圖所示: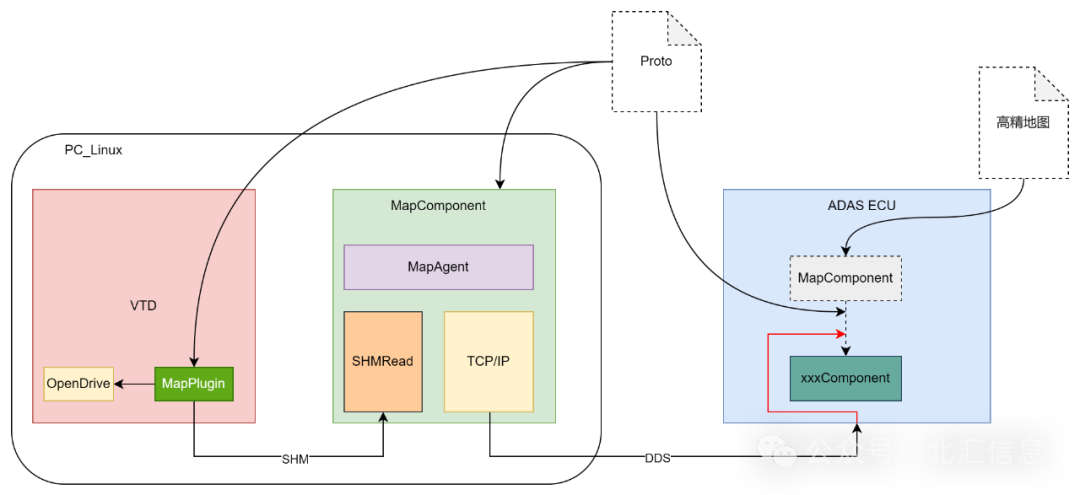 圖3 基于外部數據注入的高精地圖仿真原理圖
圖3 基于外部數據注入的高精地圖仿真原理圖
1)屏蔽控制器內部地圖模塊組件,截斷控制器內部地圖模塊與融合規控模塊組件之間的數據傳輸,使用外部自制地圖模塊替代。
2)分析地圖模塊輸出接口協議(通信協議、數據封裝協議),基于Linux環境開發中間件(與控制器內部中間件保持一致、如DDS)及應用程序MapComponent(地圖組件),建立與控制器內部組件之間的通信。
3)基于場景仿真軟件VTD開發MapPlugin(高精地圖插件),解析提取OpenDRIVE中的道路元素信息并寫入共享內存。
4)MapComponent讀取MapPlugin寫入到共享內存中的道路元素信息,并根據接口協議封裝數據,通過中間件(如DDS)發送至控制器內部。
地圖解析插件MapPlugin開發原理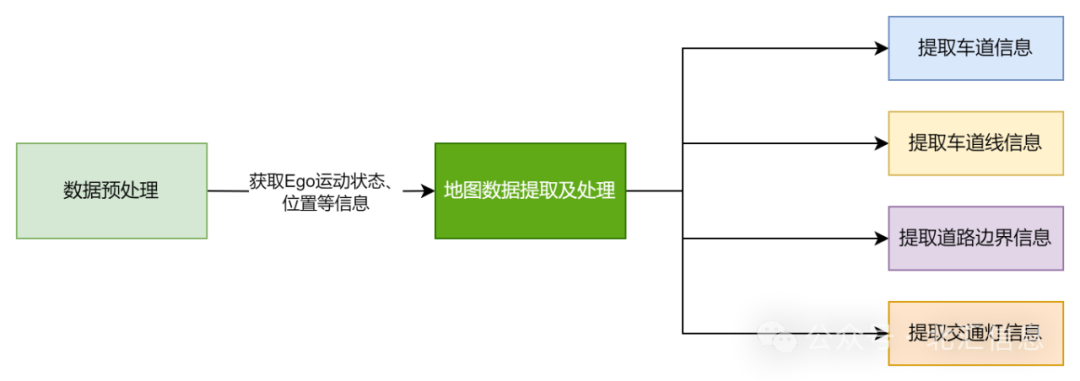 圖4 地圖解析插件MapPlugin代碼框架
圖4 地圖解析插件MapPlugin代碼框架
如上圖所示:
1)MapPlugin插件主要通過數據預處理模塊提取Ego車運動狀態、位置等信息。
2)在此基礎上,開發地圖解析模塊提取Ego車周圍車道信息、車道線信息、道路邊界信息、交通燈信息。
3)將 MapPlugin 代碼編譯成Plugin(.so文件),在VTD中加載運行。
OpenDrive中的道路元素信息有很多,需要提取哪些數據取決于控制器內部高精地圖組件輸出接口協議,一般包含兩類數據:靜態地圖數據(如車道線、車道信息等)、動態地圖數據(如Ego車到匝道口、收費站的距離等)。
地圖組件MapComponent開發原理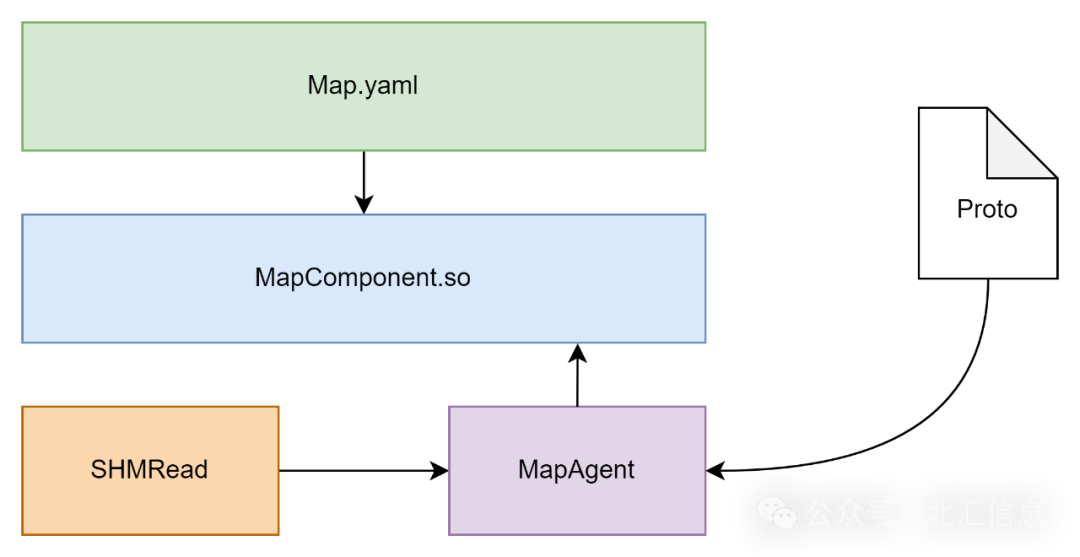 圖5 MapComponent框架原理
圖5 MapComponent框架原理
如上圖所示:MapComponent包括共享內存數據讀取(SHMRead)和中間件數據封裝發送(MapAgent、如DDS)兩塊內容。
1)SHMRead:讀取MapPlugin寫入到共享內容中的道路元素信息,二次處理后對Proto中的接口信號賦值
2)MapAgent:封裝proto接口數據、序列化處理后發布(MapAgent的開發需適配控制器內部環境框架)。
3)Map.yaml:應用程序配置,包括通信端口、任務使能、接口數據管理等
 高精地圖仿真案例
高精地圖仿真案例
下面展示的是一個基于外部數據注入實現高精地圖仿真,結合其它傳感器仿真(如Lidar、Camera、Radar、USS),完成高速領航功能(自動下高速、上匝道)的仿真測試案例。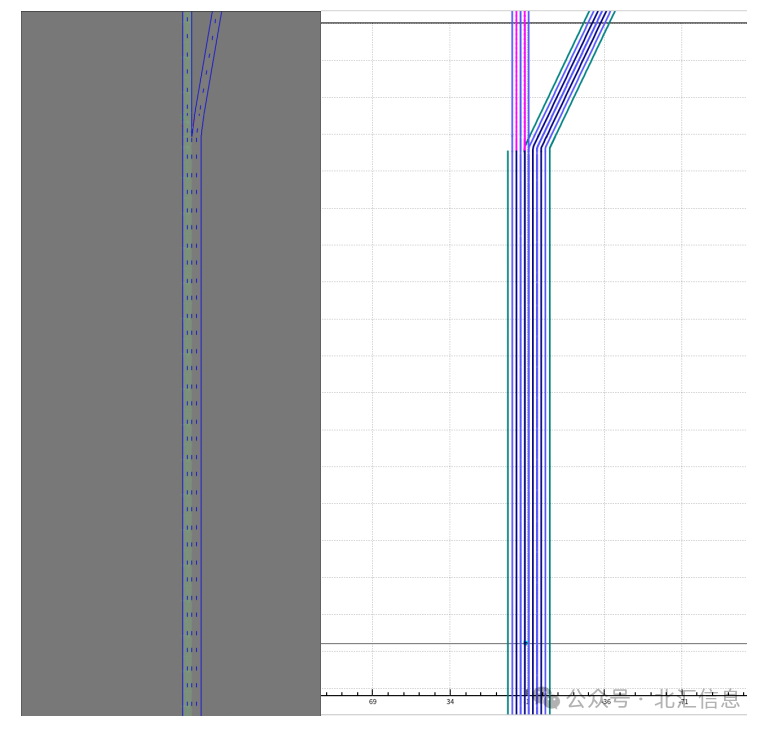 圖6 左-VTD仿真場景、右-注入到控制器內部的高精地圖
圖6 左-VTD仿真場景、右-注入到控制器內部的高精地圖
如上圖所示:左圖為VTD仿真場景(OpenDRIVE格式地圖),右圖是MapPlugin解析提取VTD仿真場景道路元素信息,通過MapComponent注入到控制器內部后生成的高精地圖;右圖中綠色實線為道路邊界,藍色實線為車道線,黑色實線為推薦導航路徑,粉紅色實線為非推薦路線。
Ego車在高速路上行駛,導航終點設置在高速路出口,領航功能激活后,車輛會自動超車、繞障、變道、駛入匝道,到達目的地附近后請求駕駛員接管,完成領航任務。 總結
總結
高精地圖作為自動駕駛的關鍵技術之一,在產品研發階段,測試人員無法拿到控制器內部高精地圖對應的OpenDRIVE文件在一定程度上阻礙了自動駕駛功能的測試驗證,北匯信息提出的基于外部數據注入的高精地圖仿真方案能夠有效解決這一技術痛點,加速自動駕駛功能的研發測試。
高精地圖技術加速了自動駕駛功能的落地應用,與此同時,高精地圖的實時性、數據準確性、范圍覆蓋度、隱私和安全性在一定程度上也限制了自動駕駛的推廣,以特斯拉為代表的純視覺無圖自動駕駛方案已展現出一定的競爭力。隨著新技術的發展與突破,自動駕駛方案也在不斷迭代更新,自動駕駛功能離我們越來越近。
北匯信息作為Vector的技術合作伙伴,覆蓋自動駕駛MiL/SiL/HiL/ViL測試、車聯網測試,傳感感知測試等,針對性地為客戶提供優質的自動駕駛測試解決方案、系統集成測試和測試服務,助力自動駕駛產品的研發測試和快速迭代。注:①OpenDRIVE是一種用于描述道路網絡和交通環境的開放標準文件格式。它提供了一種統一的描述道路幾何結構、車道信息、交通標志、交通燈等元素的方式,可用于創建高精度地圖,供自動駕駛系統使用。
-
測試
+關注
關注
8文章
5623瀏覽量
128281 -
仿真
+關注
關注
51文章
4234瀏覽量
135290 -
自動駕駛
+關注
關注
788文章
14191瀏覽量
169463
發布評論請先 登錄
為什么仿真對于自動駕駛來說非常重要?

康謀分享 | 自動駕駛仿真進入“標準時代”:aiSim全面對接ASAM OpenX

康謀分享 | 3DGS:革新自動駕駛仿真場景重建的關鍵技術

NVIDIA RTX 5880 Ada助力51Sim加速端到端仿真系統的實踐落地

從《自動駕駛地圖數據規范》聊高精地圖在自動駕駛中的重要性

智能駕駛HIL仿真測試解決方案

一文聊聊自動駕駛測試技術的挑戰與創新

基于V2X和自動駕駛HIL聯調的仿真測試系統開發



FPGA在自動駕駛領域有哪些優勢?
FPGA在自動駕駛領域有哪些應用?
自動駕駛雷達15W高導熱絕緣片

康謀分享 | 自動駕駛聯合仿真——功能模型接口FMI(三)






 工商網監
工商網監
評論