") OpenCV上八種不同的目標(biāo)追蹤算法
OpenCV上八種不同的目標(biāo)追蹤算法
編者按:目標(biāo)跟蹤作為機器學(xué)習(xí)的一個重要分支,加之其在日常生活、軍事行動中的廣泛應(yīng)用,很多國內(nèi)外學(xué)者都對此頗有研究。本文將討論OpenCV上八種不同的目標(biāo)追蹤算法。
雖然我們熟知的的質(zhì)心追蹤器表現(xiàn)得很好,但它需要我們在輸入的視頻上的每一幀運行一個目標(biāo)探測器。對大多數(shù)環(huán)境來說,在每幀上進行檢測非常耗費計算力。
所以,我們想應(yīng)用一種一次性的目標(biāo)檢測方法,然后在之后的幀上都能進行目標(biāo)追蹤,使這一任務(wù)更加快速、更高效。
這里的問題是:OpenCV能幫我們達(dá)到這種目標(biāo)追蹤的目的嗎?
答案是肯定的。
OpenCV目標(biāo)追蹤
首先,我們會大致介紹八種建立在OpenCV上的目標(biāo)檢測算法。之后我會講解如何利用這些算法進行實時目標(biāo)追蹤。最后,我們會比較各個OpenCV目標(biāo)追蹤的效果,總結(jié)各種方法能夠適應(yīng)的環(huán)境。
八種OpenCV目標(biāo)追蹤安裝
無人機拍攝的視頻,用MedianFlow進行目標(biāo)追蹤
你可能會驚訝OpenCV竟然有八種不同的目標(biāo)追蹤工具,他們都可以運用到計算機視覺領(lǐng)域中。
這八種工具包括:
BOOSTING Tracker:和Haar cascades(AdaBoost)背后所用的機器學(xué)習(xí)算法相同,但是距其誕生已有十多年了。這一追蹤器速度較慢,并且表現(xiàn)不好,但是作為元老還是有必要提及的。(最低支持OpenCV 3.0.0)
MIL Tracker:比上一個追蹤器更精確,但是失敗率比較高。(最低支持OpenCV 3.0.0)
KCF Tracker:比BOOSTING和MIL都快,但是在有遮擋的情況下表現(xiàn)不佳。(最低支持OpenCV 3.1.0)
CSRT Tracker:比KCF稍精確,但速度不如后者。(最低支持OpenCV 3.4.2)
MedianFlow Tracker:在報錯方面表現(xiàn)得很好,但是對于快速跳動或快速移動的物體,模型會失效。(最低支持OpenCV 3.0.0)
TLD Tracker:我不確定是不是OpenCV和TLD有什么不兼容的問題,但是TLD的誤報非常多,所以不推薦。(最低支持OpenCV 3.0.0)
MOSSE Tracker:速度真心快,但是不如CSRT和KCF的準(zhǔn)確率那么高,如果追求速度選它準(zhǔn)沒錯。(最低支持OpenCV 3.4.1)
GOTURN Tracker:這是OpenCV中唯一一深度學(xué)習(xí)為基礎(chǔ)的目標(biāo)檢測器。它需要額外的模型才能運行,本文不詳細(xì)講解。(最低支持OpenCV 3.2.0)
我個人的建議:
如果追求高準(zhǔn)確度,又能忍受慢一些的速度,那么就用CSRT
如果對準(zhǔn)確度的要求不苛刻,想追求速度,那么就選KCF
純粹想節(jié)省時間就用MOSSE
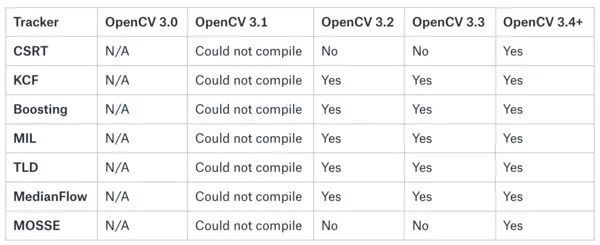
從OpenCV 3開始,目標(biāo)檢測器得到了快速發(fā)展,下表總結(jié)了不同版本的OpenCV中可食用的追蹤器:
開始動手
想要用OpenCV進行目標(biāo)追蹤,首先打開一個新文件,將它命名為opencv_object_tracker.py,然后插入以下代碼:
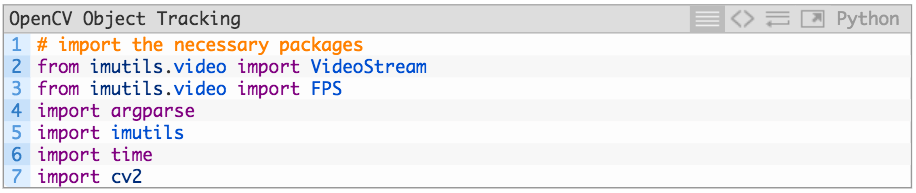
我們開始輸入必須的安裝包,確保你已經(jīng)安裝了OpenCV(我推薦3.4以上的版本),其次你要安裝imutils:

輸入安裝包后,我們開始分析命令行參數(shù):
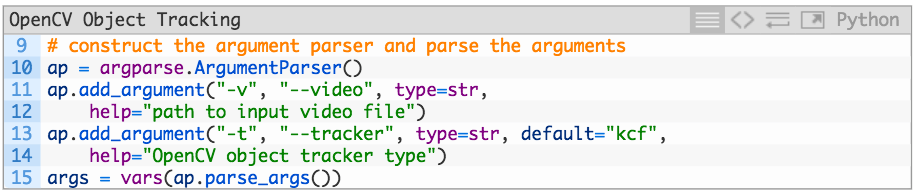
我們的命令行參數(shù)包括:
--video:到達(dá)輸入視頻文件的替代路線。如果該參數(shù)失效,那么腳本將會使用你的網(wǎng)絡(luò)攝像頭。
--tracker:假設(shè)默認(rèn)追蹤器設(shè)置的是kcf,一整列可能的追蹤器代碼表示下一個代碼塊或下方的部分。
讓我們處理追蹤器的不同類別:
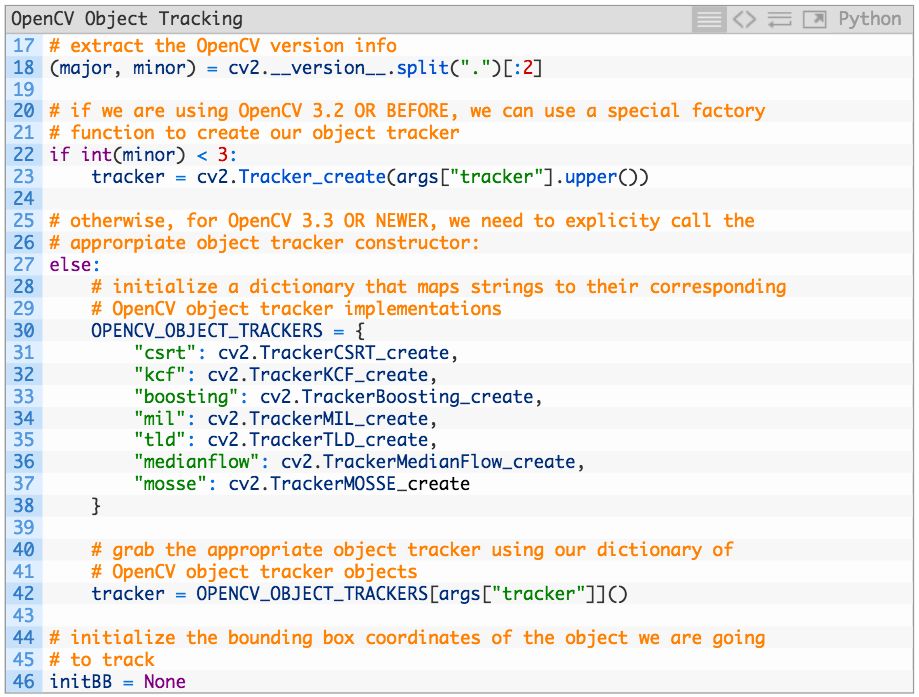
圖2中我們提到,并不是所有追蹤器都使用OpenCV 3以上的版本。在3.3版本上,同樣發(fā)生了安裝上的變化,在3.3之前,追蹤器必須用cv2. Tracker_create創(chuàng)造,并且要在追蹤器的名字上用大寫字符串標(biāo)注(22和23行)。
對于3.3以上的版本,每個追蹤器可以用各自的函數(shù)創(chuàng)造,如cv2. TrackerKCF_create。詞典OPENCV_OBJECT_TRACKERS包含了7種OpenCV的目標(biāo)追蹤器(30—38行)。它將目標(biāo)追蹤器的命令行參數(shù)字符串映射到實際的OpenCV追蹤器函數(shù)上。
其中42行里的tracker目的是根據(jù)追蹤器命令行參數(shù)以及從OPENCV_OBJECT_TRACKERS得來的相關(guān)重要信息。
注意:這里我沒有將GOTURN加入到追蹤器設(shè)置中因為它還需要額外的模型文件。
我們還對initBB進行初始化(46行),當(dāng)我們用鼠標(biāo)選中目標(biāo)物體時,該變量會顯示目標(biāo)物體的邊界框坐標(biāo)。
接下來,讓我們對視頻流和FPS進行初始化:
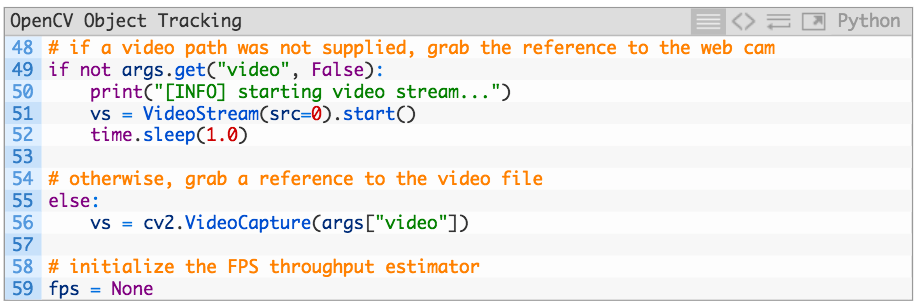
49—52行是訪問網(wǎng)絡(luò)攝像頭的步驟,這里我們設(shè)定一個一秒鐘的暫停時間,好讓攝像頭傳感器進行“熱身”。
接著--video命令行參數(shù)會出現(xiàn),所以我們可以從視頻文件中對視頻流進行初始化(55—56行)。
下面是從視頻流中進行幀數(shù)迭代循環(huán)的步驟:
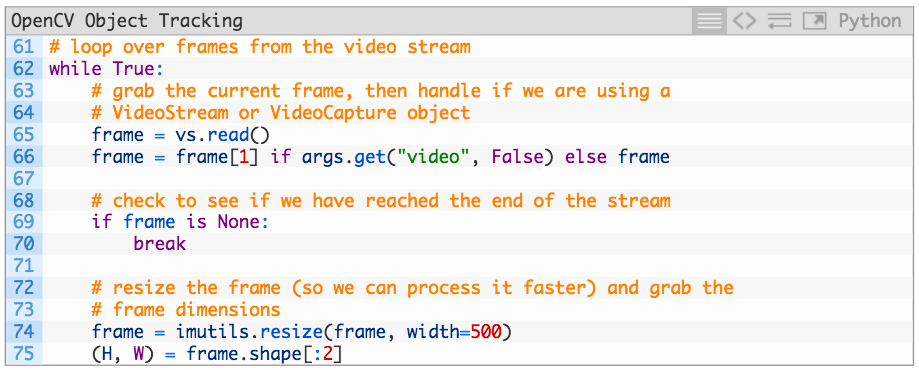
在65和66行中我們提取一個frame,同時在69和70行處理視頻文件中沒有幀數(shù)的情況。
為了讓我們的算法處理幀數(shù)的速度更快,我們用resize將輸入的視頻幀調(diào)整為50像素(74行),這里處理的數(shù)據(jù)越少,速度就會越快。
之后,我們提取視頻幀的寬度和高度,之后我們會用到高度(75行)。
目標(biāo)物體選定之后,我們就可以用以下代碼進行處理:
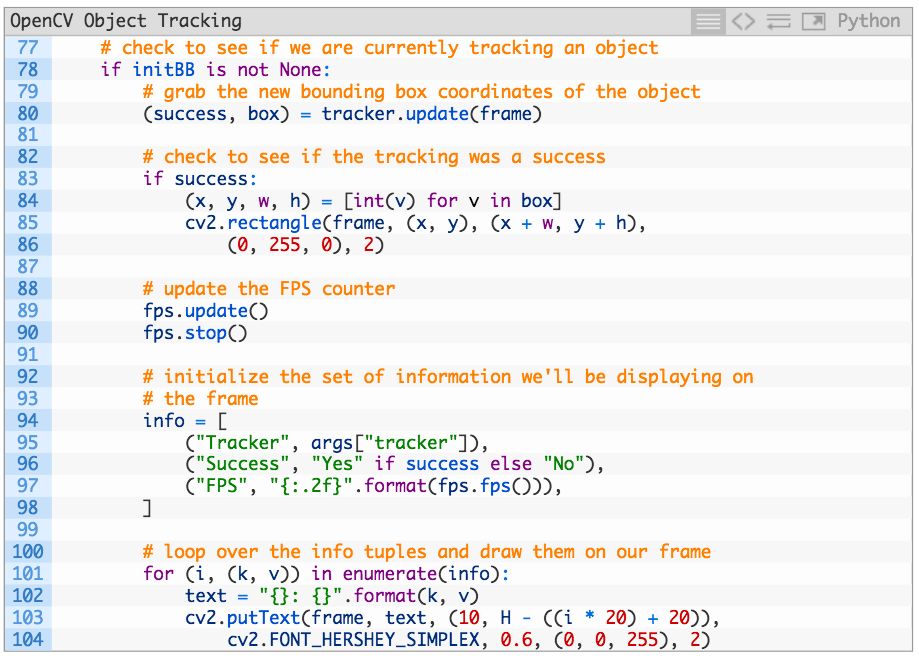
如果目標(biāo)物體已經(jīng)被選定,我們需要不斷更新目標(biāo)物體的位置,為了做到這一點,我們在80行使用update方法,它會定位目標(biāo)物體的新位置并且返回一個success和box值。
如果順利的話,我們可以在frame中得到更新后的邊界框位置。注意,追蹤器可能會跟丟目標(biāo)物并且報錯,所以success可能不會一直是True。接著更新FPS估計器。
接著,讓我們展示一下frame,以及用鼠標(biāo)選取目標(biāo)物體:
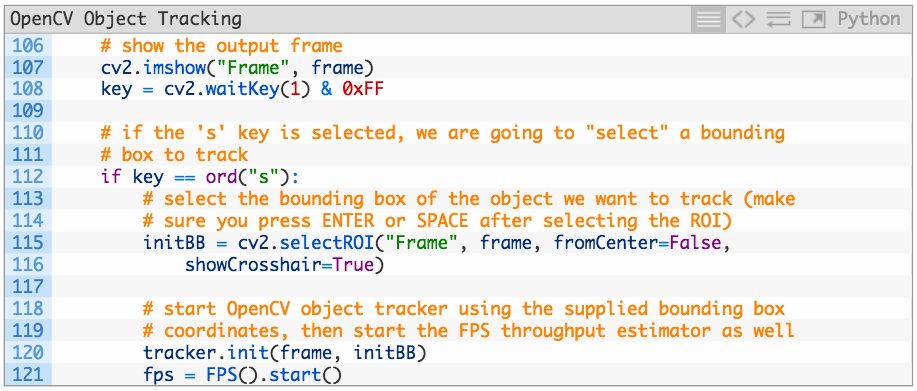
我們將展示frame,并且繼續(xù)迭代循環(huán),鍵入其他指令才會停止。
當(dāng)鍵入“s”后,我們用cv2.selectROI“選擇”一個目標(biāo)ROI。這一函數(shù)可以讓你在視頻暫停的時候手動選擇一個ROI:
用戶必須畫出邊界框后按回車或空格鍵來確定所選區(qū)域。如果你需要重新選擇,就按“ESCAPE”鍵。
同樣,我們還能用真實的目標(biāo)探測器來進行手動選擇。
最后,如果視頻有更多的幀,或者出現(xiàn)了“quit”的情況,如何退出這一循環(huán):
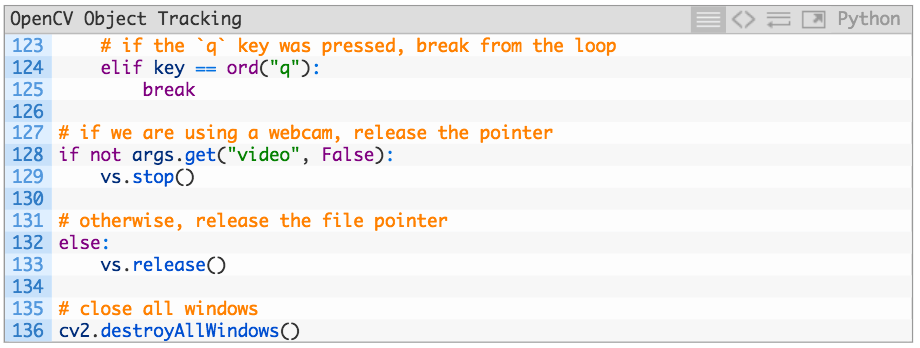
最后一個模塊展示了我們?nèi)绾瓮V寡h(huán),這時所有的指標(biāo)都輸出并且窗口關(guān)閉。
目標(biāo)追蹤結(jié)果
提示:為了確保你跟上本文的進度,并且用到了文章中的OpenCV方法,請先確保你在“下載資料”中下載了代碼和視頻。
之后,打開一個終端并執(zhí)行以下命令:

如果你下載了本教程的源代碼和視頻,那么--video的可用參數(shù)在以下文件中:
american_pharoah.mp4
dashcam_boston.mp4
drone.mp4
nascar_01.mp4
nascar_02.mp4
race.mp4
……
--tracker中的參數(shù)在:
csrt
kcf
boosting
mil
tld
medianflow
mosse
你也可以用計算機的攝像頭:

下面的實例會展示OpenCV的追蹤器如何在較長一段時間中進行追蹤,以及與短時間片段進行對比:
總結(jié)
這篇文章講解了如何用OpenCV進行目標(biāo)物體追蹤。具體來說,我們回顧了庫里的八種算法:
CSRF
KCF
Boosting
MIL
TLD
MedianFlow
MOSSE
GOTURN
我們可以將OpenCV的這八種追蹤器用于不同的任務(wù),包括短跑比賽、賽馬、賽車、無人機追蹤等高速視頻上。
-
機器學(xué)習(xí)
+關(guān)注
關(guān)注
66文章
8488瀏覽量
134010 -
追蹤算法
+關(guān)注
關(guān)注
2文章
9瀏覽量
7689 -
OpenCV
+關(guān)注
關(guān)注
32文章
642瀏覽量
42388
原文標(biāo)題:用OpenCV實現(xiàn)八種不同的目標(biāo)跟蹤算法
文章出處:【微信號:jqr_AI,微信公眾號:論智】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
仿人足球機器人目標(biāo)定位技術(shù)與追蹤算法改進
基于OPENCV的運動目標(biāo)跟蹤實現(xiàn)
基于FPGA的實時移動目標(biāo)的追蹤
基于QT+OpenCv的目標(biāo)跟蹤算法實現(xiàn)
【方案分享】基于C6678+Zynq-7045 的目標(biāo)追蹤視覺技術(shù)
一種移動信源追蹤活動目標(biāo)的方法
基于OPENCV的運動目標(biāo)跟蹤實現(xiàn)

仿人足球機器人目標(biāo)定位與追蹤算法改進方案免費下載
QT+Opencv粒子濾波算法實現(xiàn)視頻目標(biāo)跟蹤——(三)QT環(huán)境安裝及配置
QT+Opencv粒子濾波算法實現(xiàn)視頻目標(biāo)跟蹤——如何選擇跟蹤算法
使用Adaboost算法實現(xiàn)車牌檢測在OpenCV上實現(xiàn)的研究分析
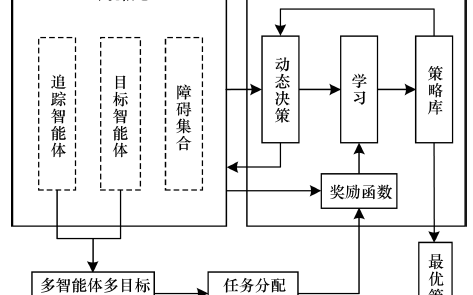
一種基于多智能體協(xié)同強化學(xué)習(xí)的多目標(biāo)追蹤方法





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論