") 小覓雙目攝像頭公布,可輸出幀率最高達(dá)80fps的高清彩色圖像
小覓雙目攝像頭公布,可輸出幀率最高達(dá)80fps的高清彩色圖像
6月27日,MYNTAI(小覓智能)正式發(fā)布公司旗下雙目硬件系列新品——小覓雙目攝像頭深度版(MYNTEYE Depth)。
相較小覓雙目攝像頭標(biāo)準(zhǔn)版(MYNT EYE Standard),深度版首度配置2顆彩色圖像采集攝像頭,可提供高達(dá)1280×720的深度分辨率,識(shí)別深度達(dá)到10m+,可輸出幀率最高達(dá)80fps的高清彩色圖像,并且無需依賴終端計(jì)算,便可直接輸出深度圖像,為三維空間信息的獲取提供更高性能,其將在三維導(dǎo)航避障、三維測量、三維識(shí)別等領(lǐng)域擁有更廣泛的應(yīng)用前景。
同時(shí),MYNT EYE Depth延用 “雙目+IMU”的核心硬件方案組合,內(nèi)置六軸IMU傳感器,利用雙目和IMU數(shù)據(jù)的互補(bǔ)性,能為視覺以及空間移動(dòng)算法的研發(fā)提供數(shù)據(jù)校正,幫助降低高精度的視覺SLAM算法和空間運(yùn)動(dòng)追蹤算法的研發(fā)周期,成為視覺SLAM研究中精度更高、成本更低、布置簡單的優(yōu)質(zhì)硬件方案,而“雙目+IMU”亦是視覺里程計(jì)(VIO)的科研標(biāo)配硬件方案。
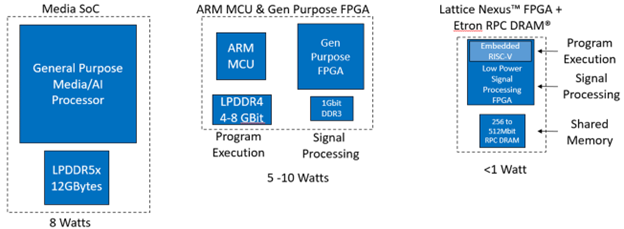
此外,MYNT EYE Depth還內(nèi)置一顆強(qiáng)大內(nèi)“芯”,可在設(shè)備端完成雙目深度計(jì)算,無需依賴終端的GPU/CPU,便可直接輸出雙目深度圖像,為視覺領(lǐng)域的技術(shù)研發(fā)與應(yīng)用提供了集成性能更佳的硬件方案。
作為一款針對立體視覺計(jì)算應(yīng)用進(jìn)行深入研發(fā)的硬件產(chǎn)品,MYNT EYE Depth可廣泛應(yīng)用于視覺定位導(dǎo)航(vSLAM)領(lǐng)域,包括無人車和機(jī)器人的視覺實(shí)時(shí)定位導(dǎo)航系統(tǒng)、無人機(jī)視覺定位系統(tǒng)、無人駕駛避障導(dǎo)航系統(tǒng)、增強(qiáng)現(xiàn)實(shí)(AR)、虛擬現(xiàn)實(shí)(VR)等;同時(shí)還可應(yīng)用于視覺識(shí)別領(lǐng)域,包括立體人臉識(shí)別、三維物體識(shí)別、空間運(yùn)動(dòng)追蹤、三維手勢與體感識(shí)別等;亦可應(yīng)用于測量領(lǐng)域,包括輔助駕駛系統(tǒng)(ADAS)、雙目體積計(jì)算、工業(yè)視覺篩檢等。
-
攝像頭
+關(guān)注
關(guān)注
61文章
4948瀏覽量
97650 -
分辨率
+關(guān)注
關(guān)注
2文章
1077瀏覽量
42426
原文標(biāo)題:小覓雙目攝像頭深度版正式發(fā)布
文章出處:【微信號(hào):robotmagazine,微信公眾號(hào):機(jī)器人技術(shù)與應(yīng)用】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
一文聊聊自動(dòng)駕駛攝像頭

天波解疑:IPC監(jiān)控攝像頭的低功耗特點(diǎn)及其優(yōu)勢

社區(qū)安裝IPC攝像頭,跟安裝一般安防監(jiān)控攝像頭有什么區(qū)別?

使用RTSP攝像頭執(zhí)行多攝像頭多目標(biāo)Python演示,缺少輸出幀是怎么回事?
ElfBoard技術(shù)貼|ELF 1開發(fā)板適配攝像頭詳解

攝像頭及紅外成像的基本工作原理

飛凌嵌入式-ELFBOARD-OV5640攝像頭簡介
飛凌嵌入式-ELFBOARD-OV5640攝像頭簡介第一期
《DNK210使用指南 -CanMV版 V1.0》第二十七章 攝像頭圖像調(diào)整實(shí)驗(yàn)
《DNK210使用指南 -CanMV版 V1.0》第二十六章 攝像頭圖像捕獲實(shí)驗(yàn)
智能化升級:機(jī)載無人機(jī)攝像頭如何自動(dòng)識(shí)別目標(biāo)?

FPGA在智能攝像頭優(yōu)化中的作用
攝像頭時(shí)鐘輻射超標(biāo)問題整改案例





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論