 如何處理傳統PID算法解決不了的情況
如何處理傳統PID算法解決不了的情況
比例-積分-微分 (PID) 算法,可以解決各種反饋控制問題, 但它并不是萬能的哦。
比例-積分-微分 (PID) 回路是當前工業自動化過程中最常見的反饋控制機制, 正如在美國CONTROL ENGINEERING編輯報道覆蓋率的調查中所反映的一樣。在該網站中提到 "PID" 或 "比例-積分-微分"的次數為8900次 ,而其它所有控制方法提到的次數合計僅為7600次。
為什么PID受到如此多的關注呢?
首先, PID 回路相對容易理解和實現。PID算法組成部分中比例 (P)、 積分 (I) 和微分 (D) 部件的影響可以直觀的預測,有時可以將設計過程簡化為 “這應該可以, 讓我們嘗試一下”,然后,“這并不是很好, 我們需要更多 (或更少)的比例 (或積分或微分)”,最終以“足夠好”結束。
當進程已啟動并運行時, 這種試錯的設計模式,比那些學術化的、需要進程離線測試的方案更方便。即使在理論上更先進的控制技術,可以提供更好的性能, 但它需要付出很多額外的努力和費用,而對于有些應用來說可能并不值得。
此外, 工業控制工程師已經花費了70年的時間來檢查、優化和增強 PID 技術, 并針對他們發現的缺陷制定解決方案。
因此, PID 已經成為事實上的標準——如果想要學習反饋控制,即使不是專家也可能開展研究的控制主題。即使是專家,他們也往往會更傾向于在簡單應用中應用PID, 因為它能以較少的數學建模和分析,再輔以更先進的相關技術來將工作完成。
PID 算法過往的人氣,反過來又促使自動化廠商更愿意提供現成的PID控制器。其它反饋控制算法也可以作為商業產品購買,但沒有一個像PID那樣廣泛應用。
廣泛的應用
PID的另一個巨大優勢是其能夠處理整個流程行業范圍內廣泛的控制問題,前提是:
受控過程是合理的、 "運行良好"的;
控制器的唯一任務就是“遲早”將過程變量與設定值相匹配;
負責執行控制器糾正措施的執行器在整個過程中具有足夠的影響力,以最終實現設定值。
在學術術語中, "運行良好" 通常意味著過程是一階或二階、最小相位、線性、時間不變, 或者開環穩定或集成。實際上, 這意味著如果控制器繼續推進, 這個過程就會一直朝著正確的方向發展。如果控制器加大推動力度, 則該過程就以可預測的速度更快速的移動(參見圖 1)。
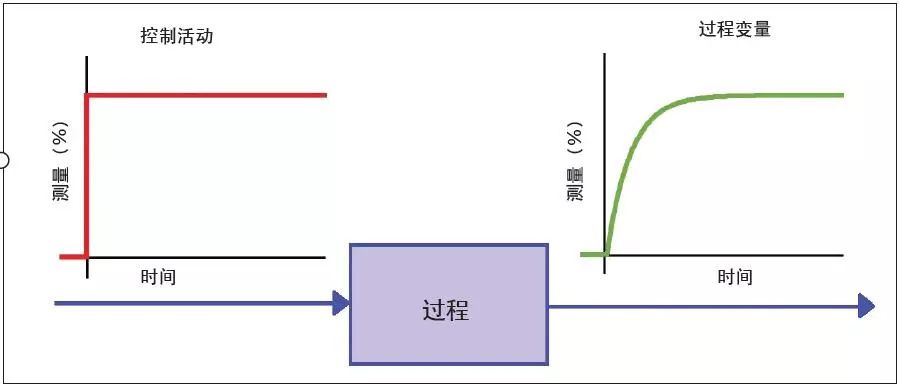
圖 1: 在這個 "運行良好"的 過程控制示例中, 過程變量 (綠色) 在控制活動(紅色) 中,或多或少的對步進過程做出響應。然后, 它以不斷下降的速率提升速度,直至達到穩定狀態值。在溫度、壓力和流量控制應用中, 一階滯后過程尤其適用于 PID 控制。
幸運的是,對于過程工業而言,大多數應用都需要控制溫度、壓力、液位和流量來維持過程的良好運轉。盡管如此,PID還是會面臨許多常見的反饋控制問題帶來的挑戰,其中一些問題可以通過對基本算法進行適當的擴展來克服,而另外一些問題則不是那么簡單。
PID的挑戰
正如在圖2中所描述的過程行為, 過程變量不會立即響應控制器的指令。它開始時并沒有緩慢的向控制器期望的方向移動,直到控制器已經開始推動它很長時間后才開始移動。
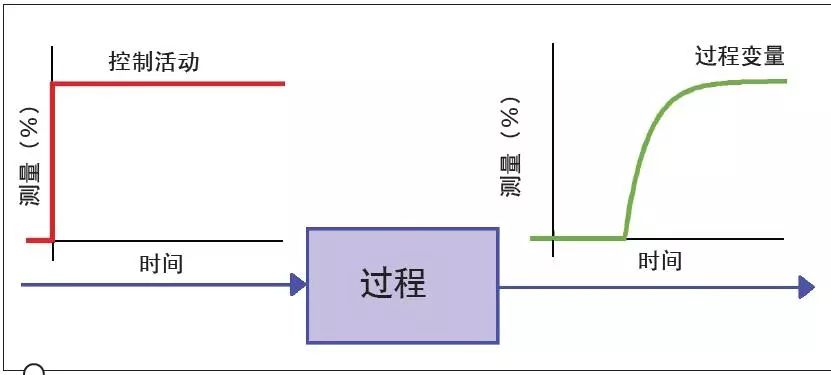
圖 2: 此過程表現的不是特別好,因為直到過了死區時間之后,過程變量 (綠色)才能在控制活動 (紅色) 的作用之下發生改變。這通常發生在控制器對物料進行操作的應用中, 因為它通過執行器的移動抵達某個距離之外的傳感器。這種死區時間主導過程的 PID 控制器必須具備足夠的耐心或遠見, 才能在最近的糾正努力到達期待值之前等待死區時間結束。
如果控制器的控制活動和過程開始響應之間的延遲或死區時間,并沒有那么長時間,那么未經修改的PID控制器就可以調節過程,只是PID算法配置的動作速度要緩慢。但是, 如果死區時間特別長或應用程序需要較少等待, PID 控制器就需要額外增加智能控制。
圖3中描述的過程行為是更棘手的情況。在這里, 過程運行在100%工況時,過程變量對控制器的控制行為做出更大的響應。相對于從0% 到50%所需付出的努力而言, 將過程變量從50% 到 100%所需要的控制力度要低得多。
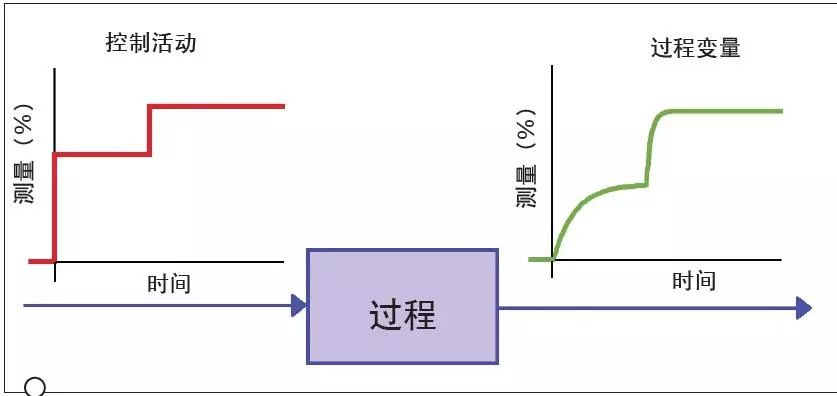
圖 3: 這個非線性過程推動了 PID 算法的極限。隨著過程變量 (綠色) 的增加, 它對控制活動(紅色) 的敏感度增加, 反之亦然。這可能會導致控制器在一個極端的情況下反應過激,而在其它工況下并不響應。過程靈敏度隨著時間的推移而不可預測的變化, 將對 PID (或任何其它控制算法) 帶來更大的挑戰。
一個基本的PID控制器,很難調節這個過程, 主要是因為過程運行在最大負荷或運行過于保守時,它的控制活動往往太過激進。這個問題的經典解決方案就是所謂的 "增益調度",不需要為PID 算法添加任何額外的智能算法, 但它需要多個控制器,每個控制器僅在過程變量落在一定范圍內時才激活。
具體地說,在過程變量接近100%時,保守的控制器接管控制,而在過程變量接近0%時,積極的控制器將接管控制。過程變量也可以劃分為兩個以上的范圍, 每個區域都有自己的 PID 控制器, 以適應每個范圍的過程行為。
另一方面, 如果與該例類似的非線性過程運行時,其過程變量如果只局限于某個狹窄的范圍, 那么單一的傳統 PID 控制器就足夠了。在其它范圍內,過程要么變得太敏感,要么變得太不敏感,但是控制器控制行為已經變得不太重要,因為進程永遠不會到達那里。幸運的是,在工業應用中, 控制對象將過程變量維持在某個設定位置上,是一個相當常見的情況。
不適用PID的場合
雖然PID回路是這樣的簡單、普及和多用途, 但是仍有一些反饋控制問題需要替代解決方案。有時應用PID會用力過猛,例如,在烤箱內調節溫度的開/關加熱元件。只有當需要較高精度時, 才需要 PID 回路。比如在大多數家庭中使用的恒溫控制器,如果溫度下降過低時,只需打開加熱器,或溫度過高時關閉控制器,就可以維持大致恒定的溫度。
另一種極端情況, 控制問題需要有比PID更智能化的解決方案, 如控制器必須提前計劃約束控制, 以避免將控制活動或過程變量,調節到可接受的范圍之外。對于多變量控制也需要高級規劃, 控制器必須協調多個執行器的工作, 同時控制多個過程變量。
PID回路可以強制適用于這些應用中的任何一種,但更先進的、自定義設計的控制技術通常更具成本效益,至少在最初時是如此。但在通常情況下, 設計和實施這些技術的專家在項目結束后可能需要進行其它項目, 讓非專家處理過程及其控制器。因此, 如果以后出現問題, 可能就沒有足夠的內部專家來解決這一難題。這種情況通常會導致高級控制器被 PID替代甚至完全被禁用, 盡管這樣可能會導致性能下降。
然后,還有其它的控制問題, 即使不是不可能,也難以通過任何控制算法來解決。錯誤的傳感器、尺寸過小的執行器、斷開的連接等問題都必須在任何類型的反饋控制工作之前解決。
-
PID算法
+關注
關注
2文章
172瀏覽量
24786
原文標題:面對這些傳統PID算法解決不了的情況,怎么辦?
文章出處:【微信號:GKYXT1508,微信公眾號:工控云學堂】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
CY7C65213-28PVXI中無法識別COM端口怎么處理?
限時免積分下載:增量式與位置式PID算法的C語言實現分享
資料免費下!PID電機控制系統(控制原理+控制算法+程序范例)
ISO3082和MAX3485E通訊,轉出來的串口數據總出問題,為什么?怎么解決?
AFE4490電路板讀寫寄存器的值一直是0x00,為什么?怎么解決?
西門子增量式PID算法帶積分分離

什么是PID控制與傳統控制的區別
PID算法的基本原理介紹
TPA3123D2通過2腳控制開關機時,會出現雜音或著嗒嗒的開關機聲音,怎么解決?
第13章-循跡功能 STM32智能小車循跡教程 PID循跡算法分析






 工商網監
工商網監
評論