 中國科學院沈陽自動化研究所:研究基于石墨烯/PDMS封裝的醫用膠帶柔性傳感器,用于水下機器人運動檢測
中國科學院沈陽自動化研究所:研究基于石墨烯/PDMS封裝的醫用膠帶柔性傳感器,用于水下機器人運動檢測

水下環境感知對機器人操作至關重要。由于柔性傳感器能夠適應各種形狀和表面,因此在深海生物捕獲、環境檢測和機械操作等科學應用中具有廣泛的應用前景。然而,面對復雜的水下環境,實現水下柔性傳感器以滿足眾多水下應用的需求仍是一項重大挑戰。本文,中國科學院沈陽自動化研究所郭洪吉等研究人員在《ADVANCED MATERIALS TECHNOLOGIES》期刊發表名為“A Nanocrack-Based Graphene/PDMS-Encapsulated Medical Tape Flexible Sensor for Motion Detection of Underwater Robots”的論文,受仿生結構啟發,如蝎子腿關節和荷葉表面,提出了一種基于石墨烯/聚二甲基硅氧烷(PDMS)的柔性應變傳感器,其敏感性基于納米裂紋效應。
該醫用膠帶納米裂紋基傳感器展現出高靈敏度(GF = 1.98)、高疏水性(接觸角 = 133°)及彎曲循環穩定性(5000次循環測試后ΔR/R0 < 0.2)。此外,該傳感器可應用于機器人手部實現精準姿態監測與交互感知。本研究成果為水下柔性傳感提供了創新解決方案,對提升水下機器人及其他相關海洋領域的操作靈活性具有重要潛力和應用價值。
圖文導讀

圖1、納米裂紋敏化石墨烯/PDMS 封裝醫用膠帶柔性應變傳感器的制造工藝。
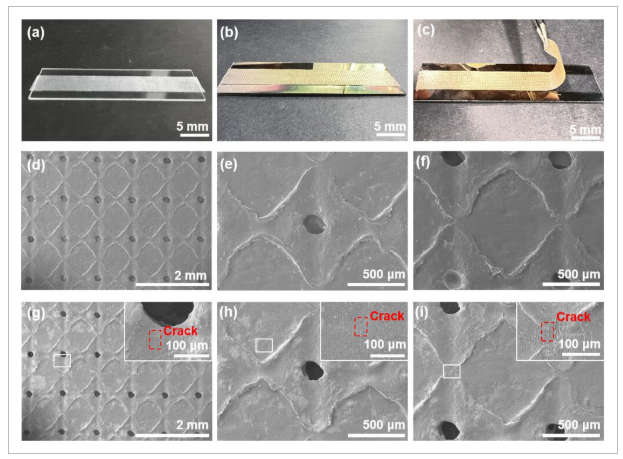
圖2. 在醫用膠帶上制造納米裂紋。
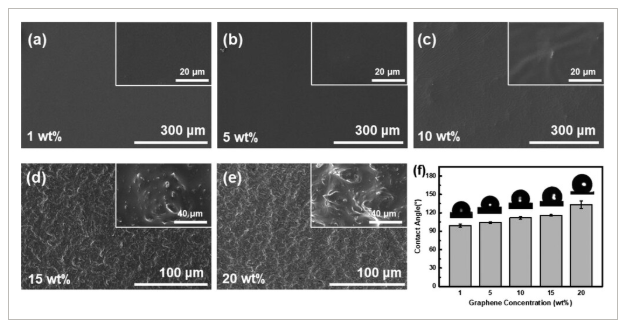
圖3、不同濃度石墨烯/PDMS 的形態特征。
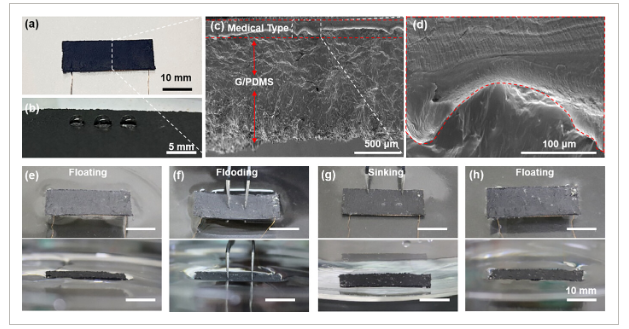
圖4. NbG/PeMT 在水浸后發生變化。
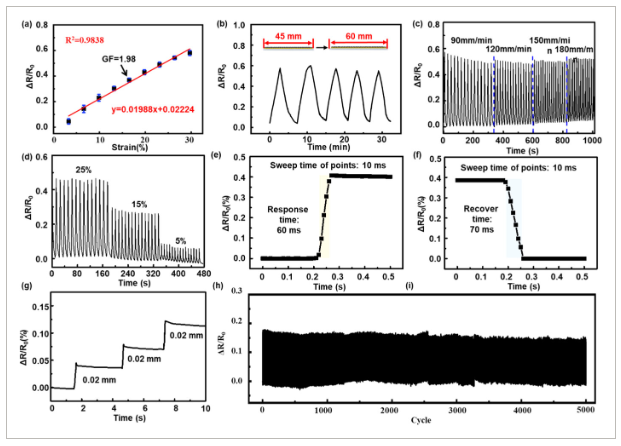
圖5. 納米裂紋敏化石墨烯/PDMS 封裝的醫用膠帶柔性應變傳感器的性能測試圖像。
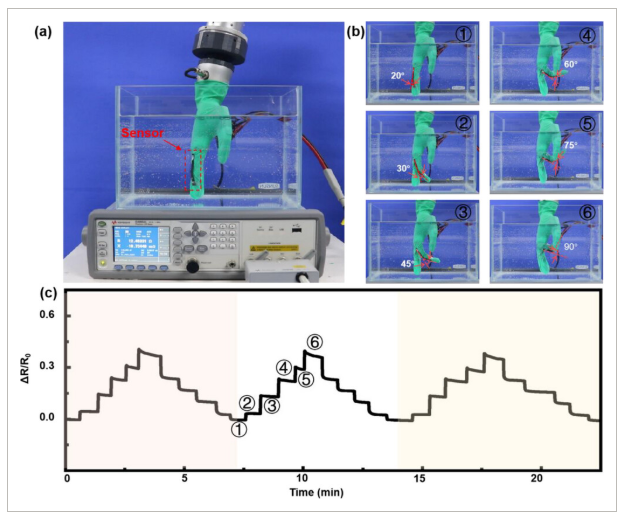
圖6、NbG/PeMT集成到機械手食指的近端手指關節中。
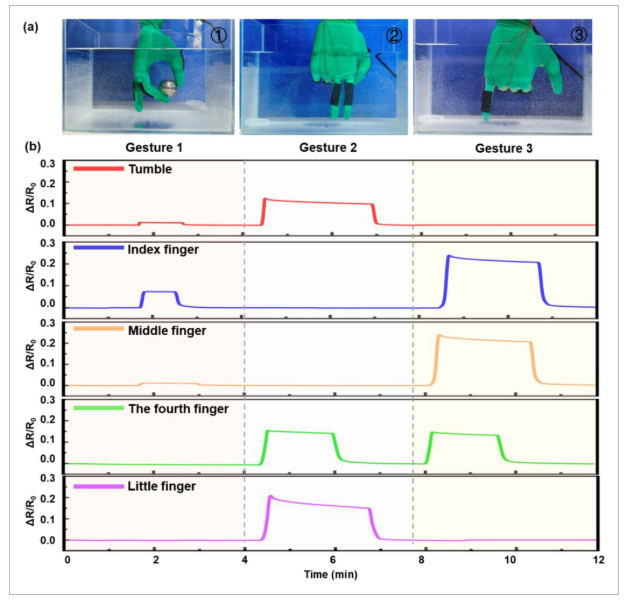
圖7. NbG/PeMT的應用集成了機械手,用于不同的手勢識別。
小結
一種基于納米裂紋的石墨烯/聚二甲基硅氧烷(PDMS)封裝醫療膠帶柔性傳感器用于水下機器人姿態檢測的新型方法已被提出。該傳感器的制造過程簡單,適合大規模生產。其設計包括醫療膠帶基底、作為電極的納米裂紋金(Au)層,以及用于封裝的石墨烯/PDMS層。實驗結果表明,基于納米裂紋的石墨烯/PDMS封裝醫療膠帶傳感器應變測量范圍可達30%,靈敏度為GF 1.98。經過5000次疲勞測試后,傳感器展現出優異的穩定重復性。機器人手指姿態監測實驗證實了該傳感器對水下機器人手部運動狀態的實時監測能力。綜上所述,我們提出了一種水下柔性傳感器的封裝方法。本文提出的NbG/PeMT傳感器具有高線性靈敏度、寬測量范圍、簡單結構和良好重復性,使其在水下機器人姿態監測及其他相關海洋領域具有廣闊應用前景。
文獻:
https://doi.org/10.1002/admt.202500620
來源:材料分析與應用
-
石墨烯
+關注
關注
54文章
1597瀏覽量
81632 -
運動檢測
+關注
關注
0文章
40瀏覽量
12742 -
水下機器人
+關注
關注
2文章
99瀏覽量
14020 -
柔性傳感器
+關注
關注
1文章
94瀏覽量
4454
發布評論請先 登錄
超聲波水下測距換能器:探索水下世界的“千里眼”
恭賀 | 晟鵬創始人成會明院士當選歐洲科學院院士!

腦機接口柔性微電極植入機器人問世
國民技術與中國科學院深圳先進技術研究院達成戰略合作
一文詳解水下機器人的產業發展現狀及趨勢分

清華大學:軟體機器人柔性傳感技術最新研究進展

研究基于密集結構石墨烯纖維的壓力傳感器,用于運動監測

中國科大:在機器人觸覺傳感器研究中取得重要進展

中國科學院金屬研究所選購我司HS-STA-001同步熱分析儀

歐洲科學院院士蔣田仔:智能化技術推動腦控和控腦技術發展

中國科學院西安光機所智能光學顯微成像研究取得新進展
中國科學院沈陽應用生態研究所選購我司同步熱分析儀

阿里云攜手中國科學院地化所發布首個月球專業大模型
中國科學院大學:實現可再生高靈敏度生物傳感器新進展






 工商網監
工商網監
評論