 力特奧維斯Littelfuse方案--人形機器人過壓過流保護方案
力特奧維斯Littelfuse方案--人形機器人過壓過流保護方案

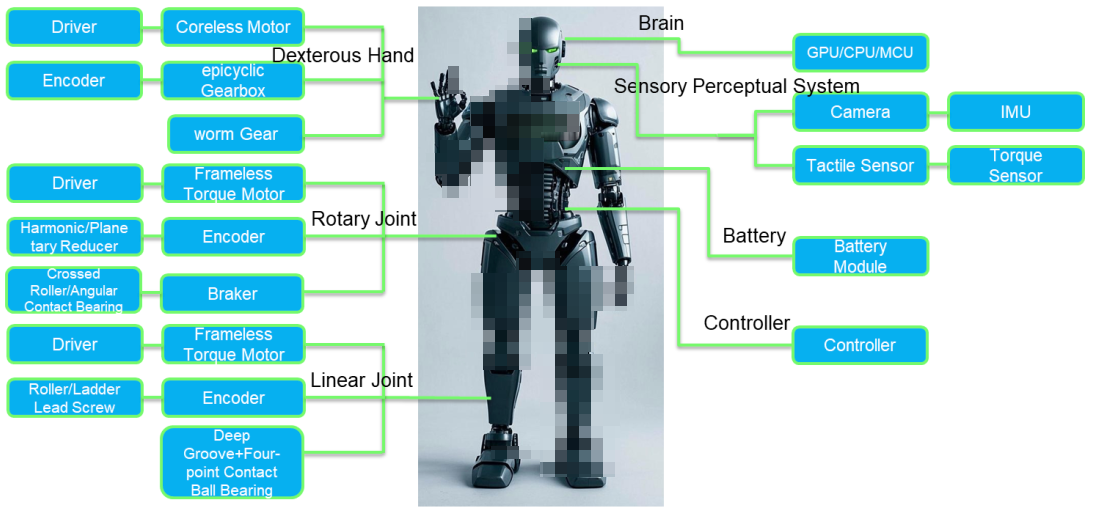
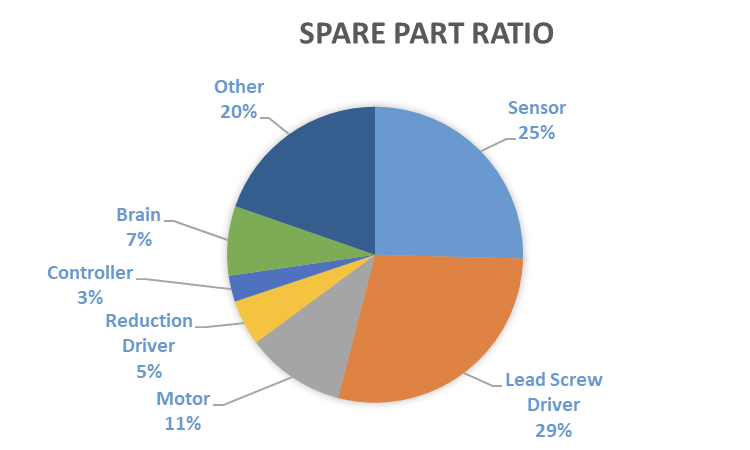
前面一章分享了人形機器人的基本框架以及每個結構對應的國內外廠家。從功能角度出發,人形機器人主要通過采集周邊信號,通過大腦處理該信號,以及針對信號做出的相應執行動作。從零部件硬件成本角度出發,占大頭的為絲桿,傳感器,電機以及主芯片,其中絲杠作為機械結構無需電子保護,部分電機會在內部串聯熱敏電阻作為過溫或過流保護。因此整個環節當中真正涉及過流過壓保護的主要在控制器,驅動器以及傳感器信號采集等,相對而言在人形機器人中占比較低,但又不可忽視。
相對而言,人形機器人可以說是電機與絲桿的協同合作為主,往小了類比,掃地機器人是一個非常典型的類同產品,同樣涉及到信號采集與處理以及電機控制,只不過人形機器人執行機構更多更復雜,同時后續往人工智能方向發展為主。因此過壓過流保護電路可以參考掃地機器人的架構,也是圍繞著電機控制,電池供電,以及信號采集板與主控板。

人形機器人極少會帶線工作,因此內部需要用到電池,這里就需要涉及到機器人的充電,所謂的充電鄔,以特斯拉人形機器人為例,電池容量是2kwh,因此折算過來充電功率大概率在5kw以內,主流的在1kw甚至500w以下,但未來隨著電池技術進步以及不同功能或續航要求的提升,相信充電鄔的功率要求會隨之提升,同時大功率充電器已經是很成熟的產品了,汽車充電屬于非常典型例子,兩輪車充電與機器人類似,屬于低壓電池。
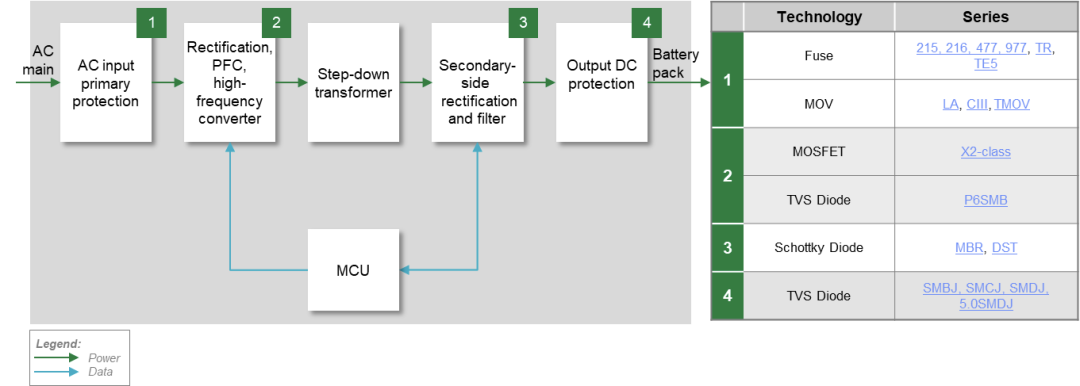
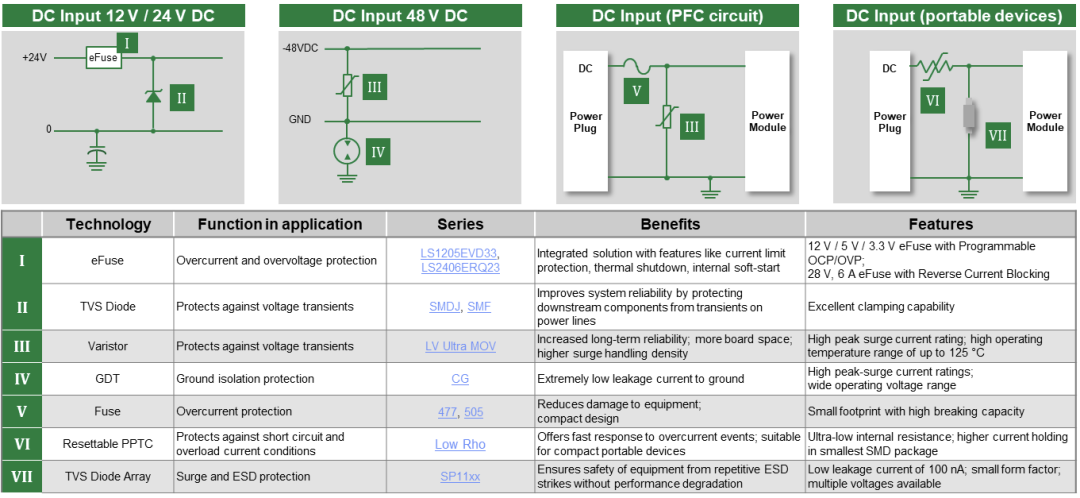
電子變換除了充電還有電機控制以及電源電壓變換,都屬于直流供電,因此總結需要用到的保護器件可以參考如下,有eFuse作為高精度過壓過流保護,TVS/MOV/GDT作為浪涌保護,Diode Array作為信號與靜電保護,保險絲作為過流與短路保護。
人形機器人的電池電壓通常在48-58V之間?。目前,人形機器人普遍采用48-58V的系統電壓,電池組結構以13-16串3-9并為主?,電池類型主要是鋰離子電池。
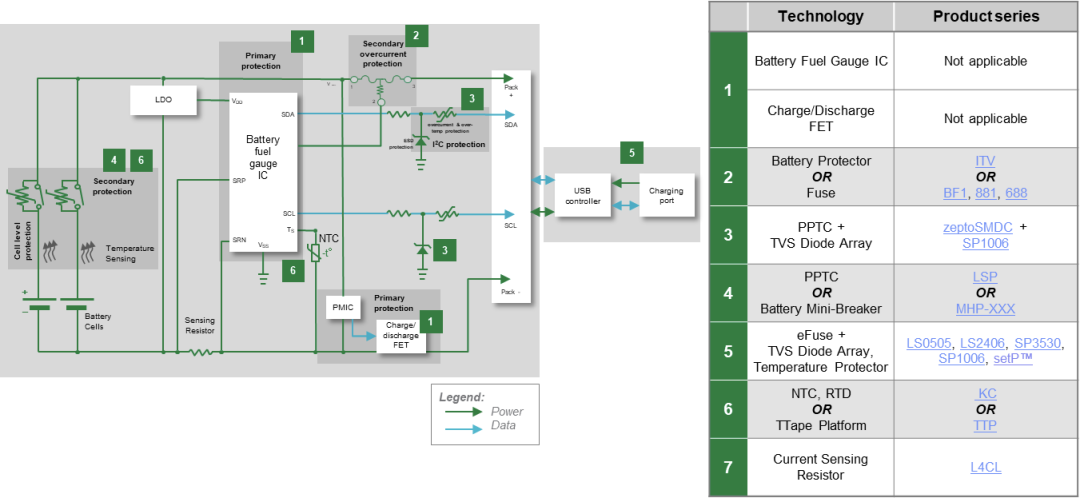
關于電池保護力特有完整的解決方案,從消費到工業再到汽車,主要涉及過流,過壓以及過溫保護。電芯的電池管理與保護這里不做列寫,通常也是電源端口的過流保護,通信線上的過壓浪涌與靜電保護。
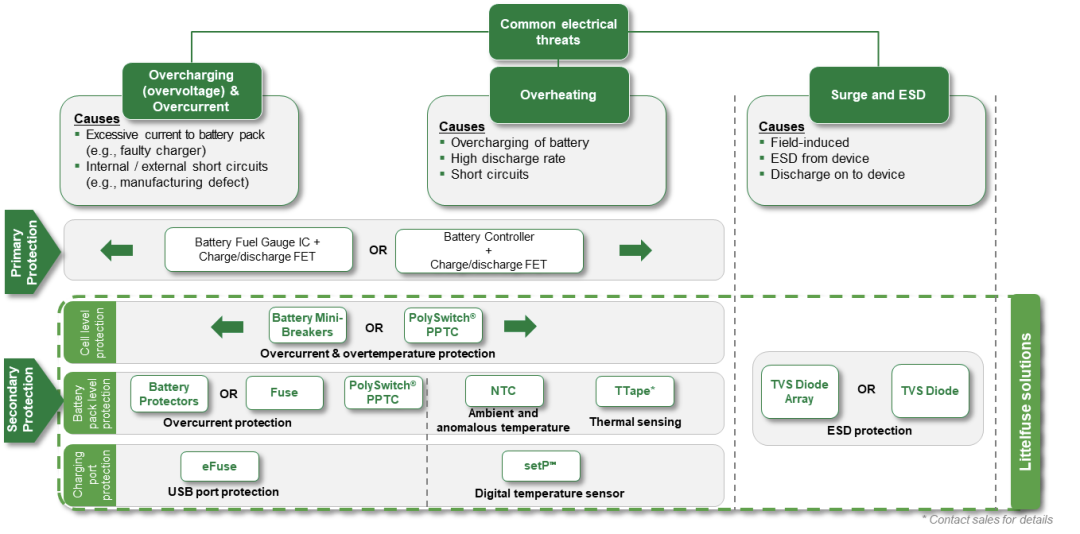
電池外圍保護相對要多一些,比如電池包通常用MOSFET作為電源開關,此MOSFET兩端可以并聯TVS來作為電路的關斷電壓尖峰抑制。對于輸出功率不大的地方可以采用三端保險絲,電流較大的也可采用大電流一次性保險絲,貼片最大可以做到200A,鎖螺栓就可以做到500A,同時小的供電或者信號回路也可以采用Efuse作為電路開關或者過壓過流保護,具有更高精度控制。
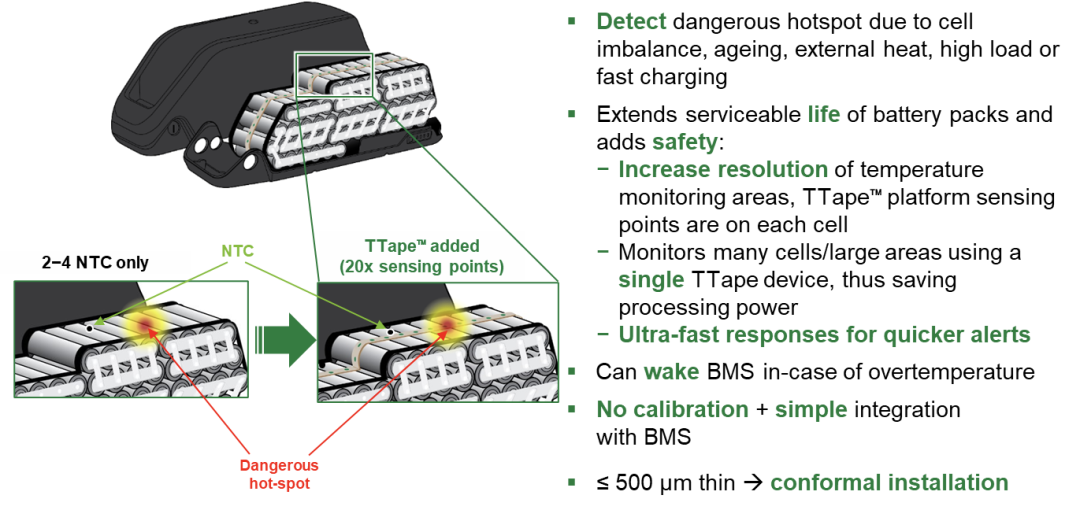
力特在過溫保護方面有全新的產品TTape,類似柔性板,可以針對各個需要的溫度監測點進行定制,同時整個鏈路采用串聯模式,優點可以實現極少I/O口占用,同時響應速度快,但缺點是沒辦法實現具體故障點的報警,如果需要各個溫度點的溫度實時監測,還是得用到NTC。
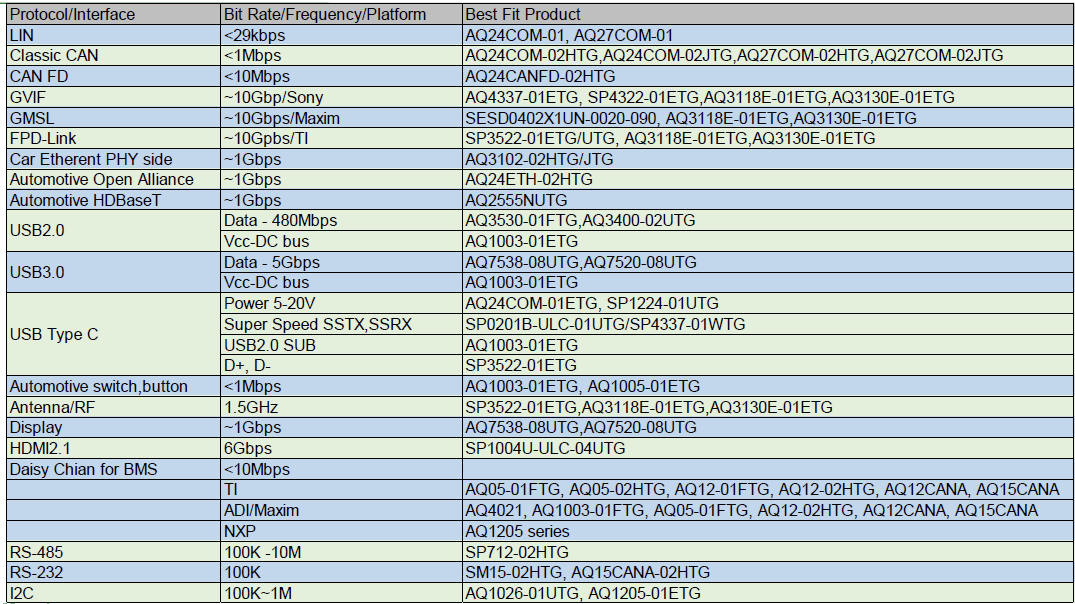
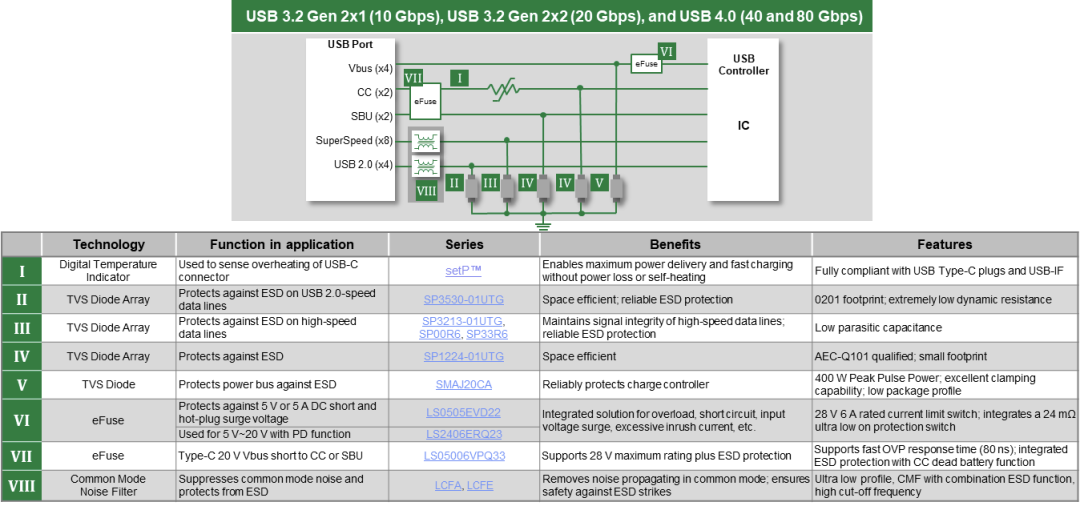
通信端口則有很多ESD產品推薦,如下羅列了比較常用的信號接口類型以及對應的靜電產品推薦。
本篇文章比較簡單,主要分享比較常用的幾個功能模塊過壓與過流保護方案,這些方案在現有消費類以及工業類應用都有跡可循,人形機器人是比較熱門比較新的應用,但底層硬件還是比較傳統的電機控制為主。
-
過壓保護
+關注
關注
3文章
289瀏覽量
33211 -
過流保護
+關注
關注
10文章
261瀏覽量
32587 -
過溫保護
+關注
關注
0文章
30瀏覽量
9203 -
Littelfuse
+關注
關注
5文章
253瀏覽量
97245 -
人形機器人
+關注
關注
7文章
736瀏覽量
17619
原文標題:【技術淺談】人形機器人過壓過流保護方案
文章出處:【微信號:Littelfuse_career,微信公眾號:力特奧維斯Littelfuse】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄





 工商網監
工商網監
評論