") 2025年的自動駕駛技術(shù)有哪些升級?
2025年的自動駕駛技術(shù)有哪些升級?
[首發(fā)于智駕最前沿微信公眾號]隨著智能網(wǎng)聯(lián)汽車產(chǎn)業(yè)的持續(xù)推進,高階智能輔助駕駛正迎來全新的技術(shù)拐點。從2023年至2025年,行業(yè)已基本完成從高速NOA到城市NOA的演進,具備典型場景高階智能輔助駕駛能力的車型不斷量產(chǎn)落地,自動駕駛的可運營場景逐步從限定區(qū)域擴展至泛化場景,且真正朝著全場景D2D(Door-to-Door)邁進。

圖自動駕駛發(fā)展路徑,源自:億歐智庫
在此過程中,ODD(Operational Design Domain,運行設(shè)計域)的拓展成為關(guān)鍵一環(huán),從最初的高速封閉路段逐步拓展至城市道路、泊車場景及低速園區(qū)等復(fù)雜環(huán)境,實現(xiàn)對高精度地圖、高通量計算、高可靠傳感等關(guān)鍵環(huán)節(jié)的協(xié)同突破。通過多傳感器融合、感知能力提升以及算法結(jié)構(gòu)優(yōu)化,整車實現(xiàn)了從路徑規(guī)劃到行為決策的連續(xù)性升級。中國市場在硬件端不斷下探成本的同時,通過軟件架構(gòu)模塊化重構(gòu)與OTA頻繁迭代,持續(xù)推動普惠型智能駕駛普及,開啟了10萬元級別車型搭載高階輔助駕駛功能的新時代。
在系統(tǒng)架構(gòu)層面,當(dāng)前主流方案普遍采用“云端-邊緣-車端”三級算力傳導(dǎo)路徑,通過不同層級算力的協(xié)同,實現(xiàn)數(shù)據(jù)處理與模型訓(xùn)練的高效閉環(huán)。云端主要承擔(dān)模型大規(guī)模訓(xùn)練與仿真測試功能,是算法進化的核心算力中心。以特斯拉為例,其自研的Dojo超算平臺可達(dá)到88.5 EFLOPS,為其端到端算法提供了強大訓(xùn)練支持。在國內(nèi),百度、華為等企業(yè)也加快了EFLOPS級別超算中心的建設(shè)步伐,通過數(shù)據(jù)集聚與仿真迭代提升系統(tǒng)泛化能力。車端算力平臺則聚焦于推理任務(wù)與實時響應(yīng),當(dāng)前主流芯片如英偉達(dá)Orin(254 TOPS)、地平線征程5(128 TOPS)、華為MDC 810(400+TOPS)等正快速完成從百TOPS向千TOPS的躍遷。邊緣端作為數(shù)據(jù)的中間處理層,有效緩解車端計算壓力,并通過高頻OTA形成模型迭代的實時反饋通道。整體來看,算力架構(gòu)正呈現(xiàn)出由中心化訓(xùn)練向分布式部署過渡的趨勢,為高頻場景適應(yīng)與規(guī)模化落地提供保障。

圖自動駕駛系統(tǒng)架構(gòu)演進,源自:億歐智庫
數(shù)據(jù)體系是高階智能輔助駕駛閉環(huán)能力的基礎(chǔ)。系統(tǒng)從早期“硬件感知冗余”逐步演進至“數(shù)據(jù)驅(qū)動閉環(huán)”階段,通過提升數(shù)據(jù)質(zhì)量與構(gòu)建高效反饋機制,實現(xiàn)從采集、標(biāo)注、訓(xùn)練到部署的全流程協(xié)同。長尾場景已成為當(dāng)前智能輔助駕駛算法能力提升的瓶頸,依靠大模型對復(fù)雜場景實現(xiàn)泛化能力的前提是海量、高質(zhì)量的訓(xùn)練數(shù)據(jù)。當(dāng)前主流路徑是通過事件觸發(fā)機制采集長尾數(shù)據(jù)并上傳至云端,結(jié)合閉環(huán)標(biāo)注平臺自動完成數(shù)據(jù)清洗與樣本優(yōu)化,并基于MLOps平臺實現(xiàn)多模型迭代與蒸餾部署。多模態(tài)傳感器融合也已成為提升感知覆蓋率與魯棒性的主流方案。典型高階系統(tǒng)多搭載8V5R1L或11V5R3L組合(即8個或11個攝像頭、5個毫米波雷達(dá)、1個或3個激光雷達(dá)),在硬件層面實現(xiàn)高冗余感知能力。與此同時,純視覺方案也在成本敏感市場快速推廣,依托Transformer結(jié)構(gòu)與大模型訓(xùn)練手段提升語義理解與時空推理能力,降低了激光雷達(dá)與高精地圖的依賴。
定位能力的提升亦是高階智能輔助駕駛向城市復(fù)雜場景滲透的前提。在系統(tǒng)設(shè)計中,已從傳統(tǒng)GNSS單點定位發(fā)展為基于GNSS+IMU+視覺SLAM+激光雷達(dá)融合的高精度定位方案,并通過多模態(tài)數(shù)據(jù)的實時融合實現(xiàn)復(fù)雜環(huán)境下的魯棒識別。泛在定位架構(gòu)成為趨勢,即基于車端感知、自主建圖、V2X等能力構(gòu)建可脫離高精地圖的實時定位網(wǎng)絡(luò)。針對城市環(huán)境中隧道、高架、地下車庫等信號弱區(qū),通過構(gòu)建高置信度先驗?zāi)P团c局部環(huán)境重定位算法,系統(tǒng)能夠在無外部信號支持下完成連續(xù)路徑估計與精度恢復(fù),保障城市NOA的可靠運行。

算法結(jié)構(gòu)也在經(jīng)歷深刻的范式轉(zhuǎn)換。過去以“感知—預(yù)測—規(guī)控”串行結(jié)構(gòu)為主的模塊化算法,逐步向端到端(E2E)架構(gòu)轉(zhuǎn)變。在特斯拉引領(lǐng)下,端到端算法架構(gòu)已完成從多階段輸出到矢量空間表達(dá)、從規(guī)則驅(qū)動到大模型感知的多輪升級。當(dāng)前,國內(nèi)主流廠商如小鵬、百度Apollo、蔚來等也在推動E2E技術(shù)演進。具體路徑就是模塊化結(jié)構(gòu)向“感知-決策-控制”一體化架構(gòu)升級,通過Transformer+BEV感知空間構(gòu)建類人駕駛路徑表征模型,實現(xiàn)更高的行為合理性與路徑可解釋性。此外,車端算法正加速向VLA(Vision-Language-Action)結(jié)構(gòu)演進,通過引入語言模型與決策圖譜,使車輛具備復(fù)雜語義理解與任務(wù)分解能力,開啟從“能動控制”向“認(rèn)知智能”躍遷的技術(shù)路徑。
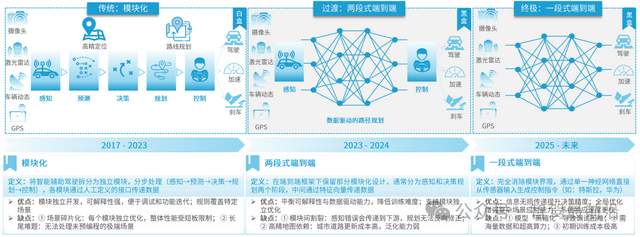
圖自動駕駛算法結(jié)構(gòu)演進,源自:億歐智庫
為了突破數(shù)據(jù)成本與長尾場景的訓(xùn)練瓶頸,“世界模型”在云端訓(xùn)練中逐漸成為主流。世界模型通過構(gòu)建可交互的虛擬環(huán)境,將真實世界映射為高精度仿真平臺,使得算法能夠在虛擬環(huán)境中進行大規(guī)模試錯與策略學(xué)習(xí),從而大幅降低真實數(shù)據(jù)采集成本與訓(xùn)練風(fēng)險。訓(xùn)練完成后的模型經(jīng)由輕量化蒸餾部署至車端,兼顧模型精度與算力約束,構(gòu)成“云端大模型+車端小模型”的混合智能協(xié)作架構(gòu)。這一結(jié)構(gòu)有效緩解了算力瓶頸問題,并提升系統(tǒng)對未見場景的泛化能力,是推動高階智能輔助駕駛從“感知控制”向“意圖理解”演化的重要技術(shù)方向。
從產(chǎn)業(yè)形態(tài)來看,當(dāng)前智能輔助駕駛方案呈現(xiàn)三類發(fā)展路徑,即軟硬全棧自研、自研+外采、軟硬全外采。全棧自研企業(yè)如華為、百度通過芯片、算法、工具鏈與平臺等一體化布局構(gòu)建閉環(huán)體系,實現(xiàn)從數(shù)據(jù)采集到模型部署的全流程掌控,具備強大的定制化能力與快速迭代機制;自研+外采則通過掌握算法核心并結(jié)合第三方芯片與傳感器構(gòu)建柔性架構(gòu),實現(xiàn)研發(fā)成本與量產(chǎn)落地的雙平衡;而第三方軟硬外采方案則以輕量化、標(biāo)準(zhǔn)化為主,快速適配整車廠需求,推動中低端車型智能化普及。總體來看,方案模式與整車廠技術(shù)戰(zhàn)略深度綁定,形成多樣化發(fā)展生態(tài)。
未來,隨著政策支持日趨明朗、量產(chǎn)路徑日益清晰,以及多家主機廠發(fā)布L3及以上級別自動駕駛車型的量產(chǎn)規(guī)劃,高階智能輔助駕駛正在加速邁向真正的商業(yè)化階段。自動駕駛系統(tǒng)的競爭焦點將進一步聚焦于算法泛化能力、系統(tǒng)魯棒性、模型輕量化與數(shù)據(jù)閉環(huán)效率等核心指標(biāo)。伴隨車規(guī)級大算力芯片、泛在高精度定位網(wǎng)絡(luò)以及端云協(xié)同算法體系的全面升級,自動駕駛正在從技術(shù)試驗走向規(guī)模部署,成為未來汽車智能化轉(zhuǎn)型的關(guān)鍵支點。
-
自動駕駛
+關(guān)注
關(guān)注
788文章
14251瀏覽量
170010 -
自動駕駛技術(shù)
+關(guān)注
關(guān)注
4文章
98瀏覽量
15199
發(fā)布評論請先 登錄
自動駕駛技術(shù)測試有哪些?

導(dǎo)遠(yuǎn)科技亮相2025歐洲高級輔助與自動駕駛技術(shù)博覽會
自動駕駛大模型中常提的Token是個啥?對自動駕駛有何影響?
理想汽車推出全新自動駕駛架構(gòu)
2024年自動駕駛行業(yè)熱點技術(shù)盤點
光庭信息自動駕駛系統(tǒng)亮相CES 2025
NVIDIA DRIVE技術(shù)推動自動駕駛發(fā)展
Arbe誠邀您共赴CES 2025,探索未來自動駕駛
一文聊聊自動駕駛測試技術(shù)的挑戰(zhàn)與創(chuàng)新

自動駕駛汽車安全嗎?






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論