 開疆智能ModbusTCP轉Devicenet網關連接三菱PLC與ABB機器人配置案例
開疆智能ModbusTCP轉Devicenet網關連接三菱PLC與ABB機器人配置案例

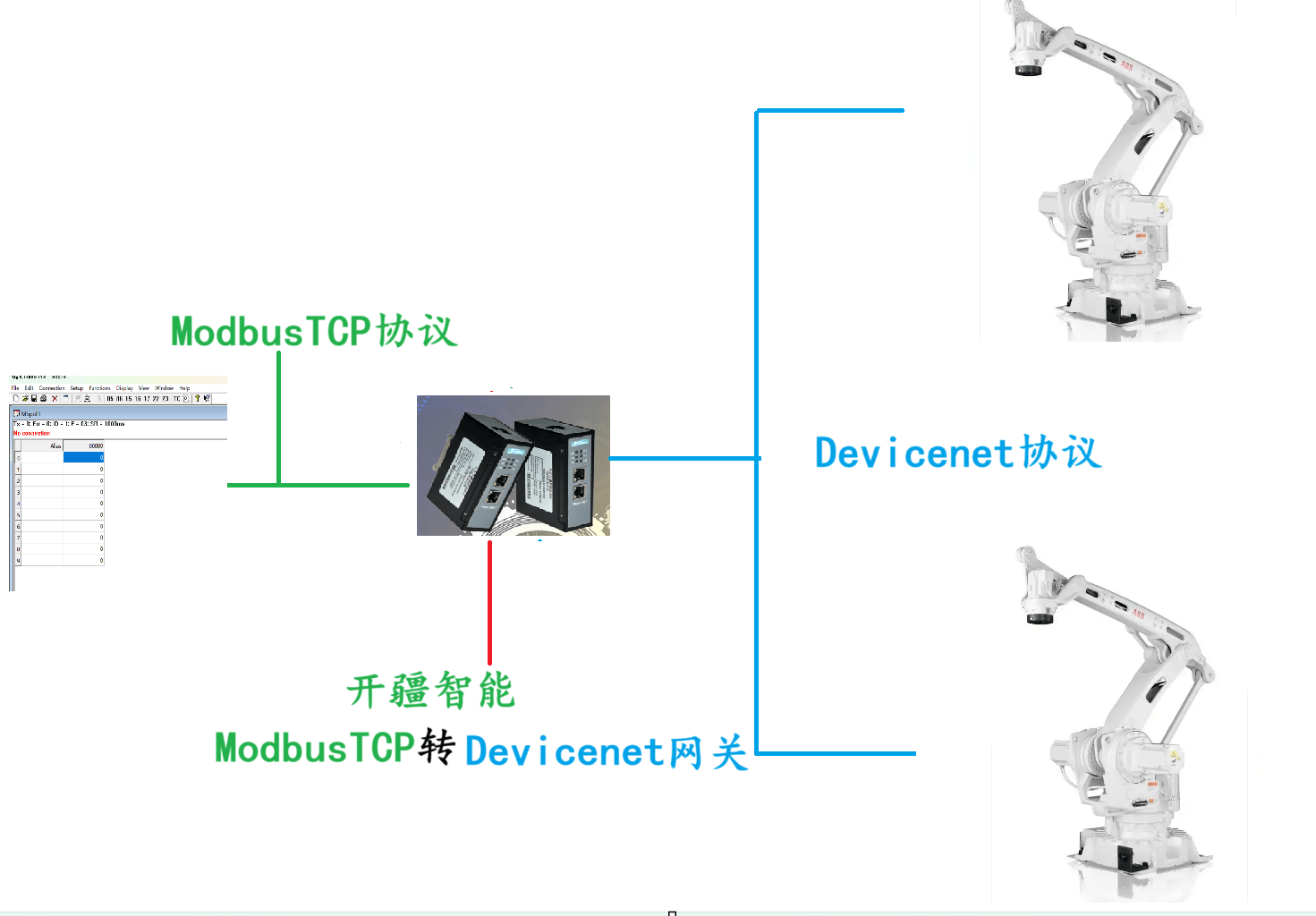
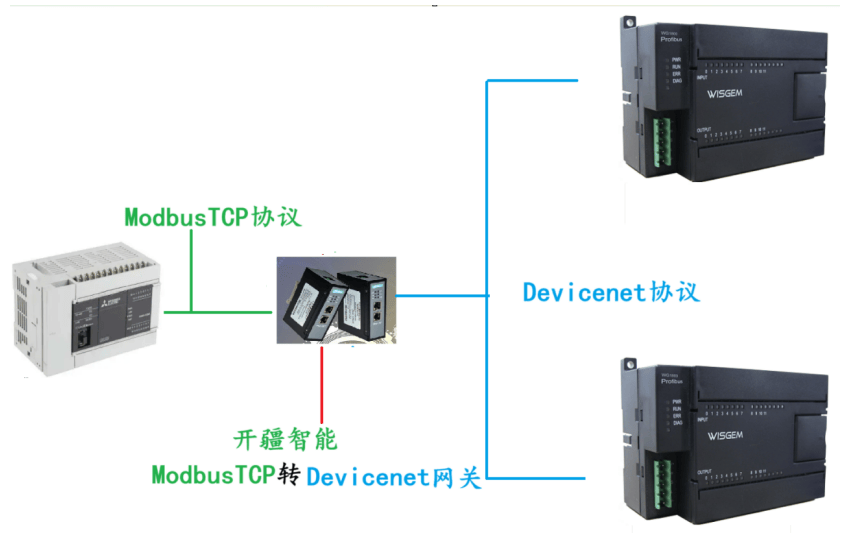
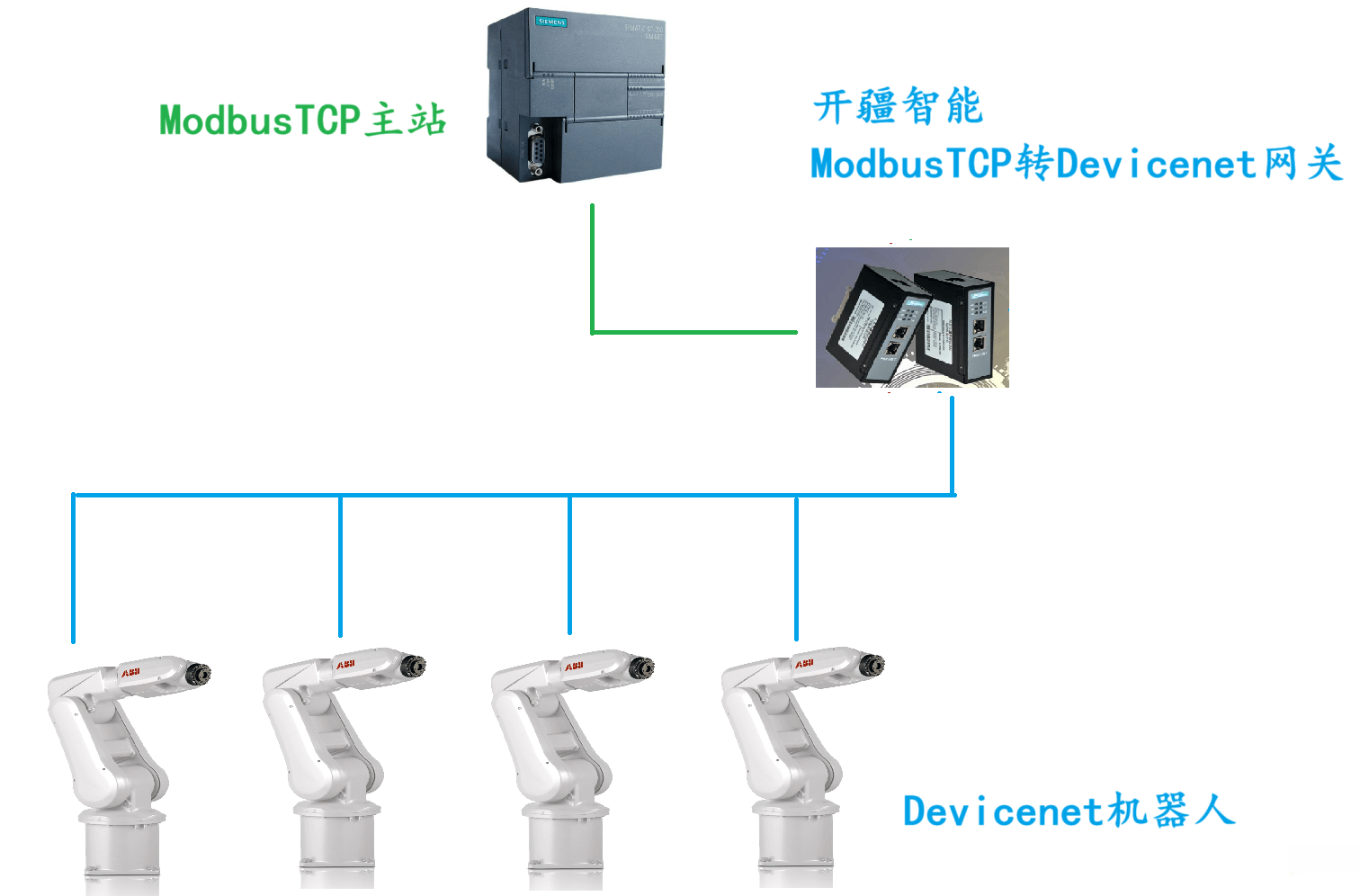
本案例是三菱PLC通過開疆智能ModbusTCP轉Devicenet網關連接ABB機器人的配置案例,具體分為三部分設置,分別為三菱PLC設置,ModbusTCP轉Devicenet網關的配置以及ABB機器人的配置部分。

配置過程:
一、機器人配置
1. 機器人選項
2. 修改機器人地址
3. 修改輸入輸出字節
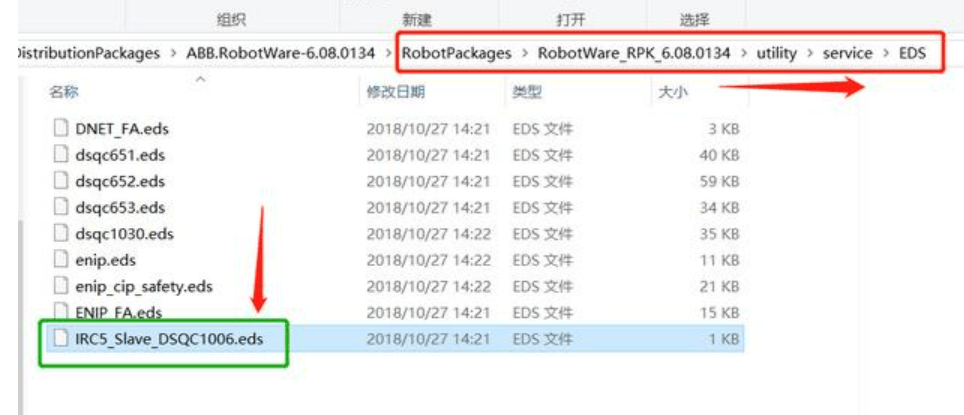
4. 獲取PLC組態的機器人EDS描述文件
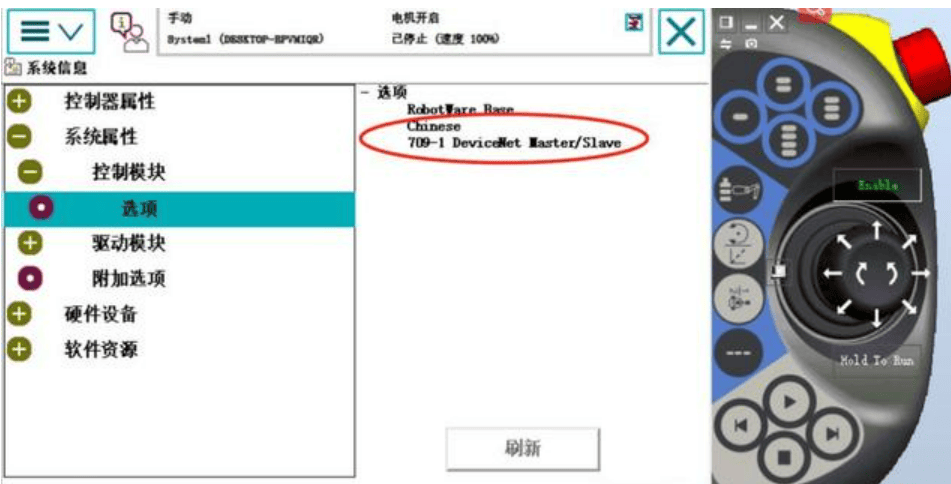
1. 機器人選項
1.1 機器人DeviceNet設備可用于:
DeviceNet內部從設備與主設備共享地址和物理連接器。1.2 要使用機器人DeviceNet做從站,必須使用選項:709-1 DeviceNet Master / Slave 。
1.3 在DeviceNet網絡上機器人做從站,既要配置機器人參數,也要在PLC上組態設置參數。
2. 修改機器人地址
第一步,在示教器菜單目錄中,進入控制面板-配置-Industrial Network - DeviceNet,如下圖。
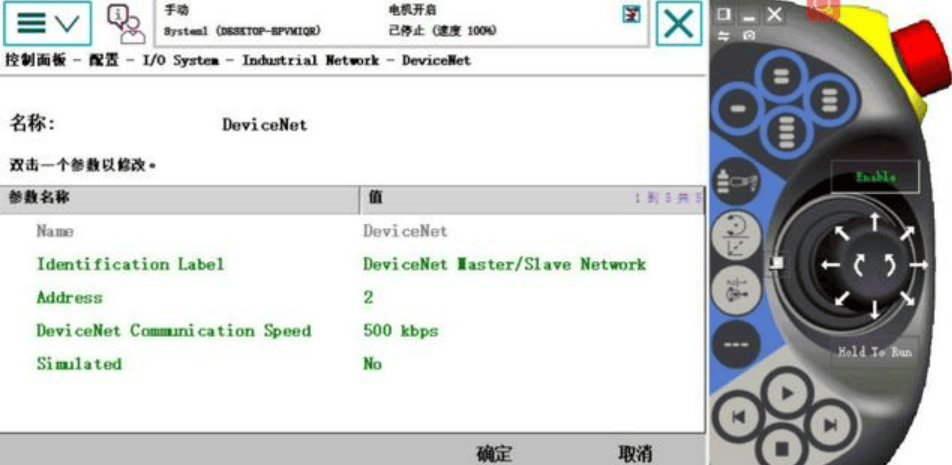
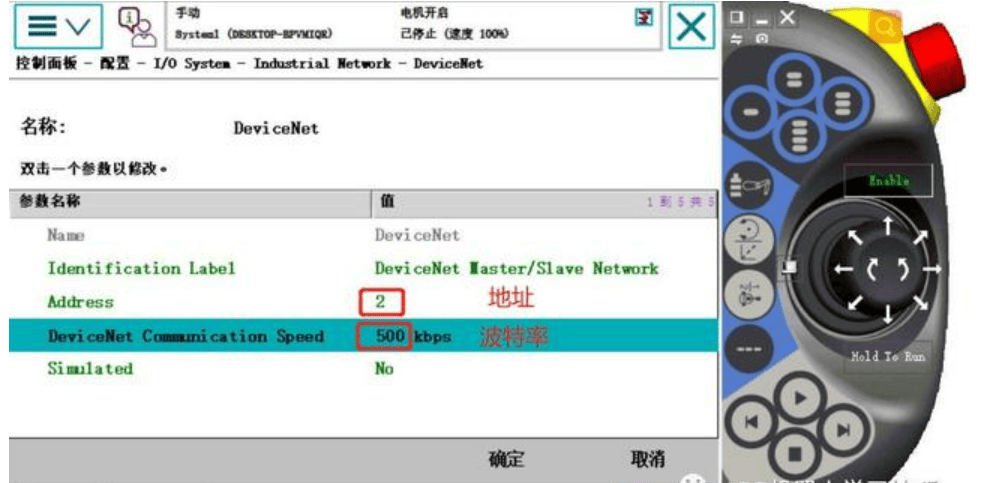
第二步,我們可以根據實致需要修改機器人的DeviceNet地址,該地址不應使用與網絡上另一臺I / O設備相同的地址。這里我們就直接用機器人的DeviceNet地址的默認值2,允許值為0到63之間的整數。
2.1 DeviceNet通信速度:
對于DeviceNet工業網絡是強制性的,并決定DeviceNet主設備和內部從設備與DeviceNet網絡上的其他設備進行通信所使用的通信速度(波特率)。波特率是通信的信號速度,它確定串行通道中數據傳輸的最大速度。波特率越高,通信越快。使用DeviceNet Communication Speed時,同一物理網絡上的所有設備必須使用相同的波特率。默認值為500,允許的值為125、250和500,以Kbps(千比特/秒)為單位指定波特率。
3. 修改輸入輸出字節
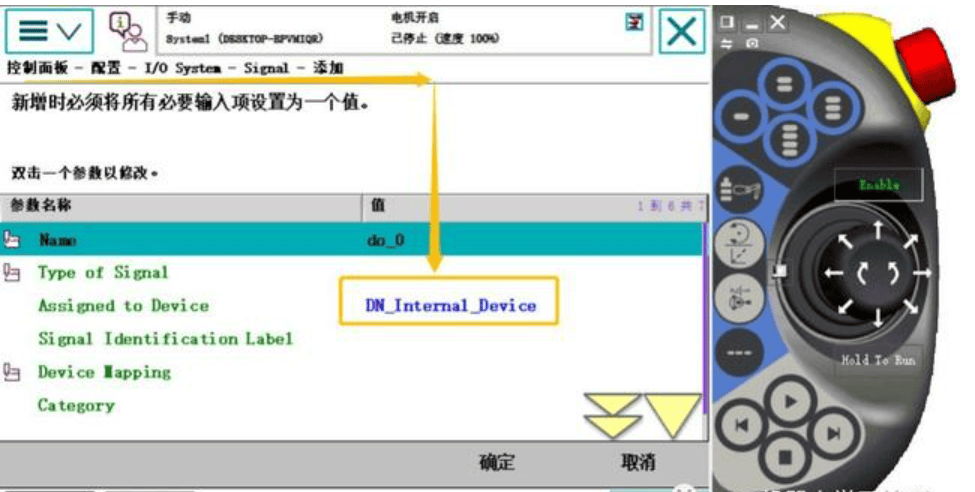
第一步,在示教器菜單目錄中,進入控制面板-配置-I/0 System-DeviceNet Internal Device(機器人做從站),如下圖。
當使用DeviceNet主/從選件安裝機器人系統時,系統啟動時會創建一個預定義的內部從站設備,名稱為DN_Internal_Device。
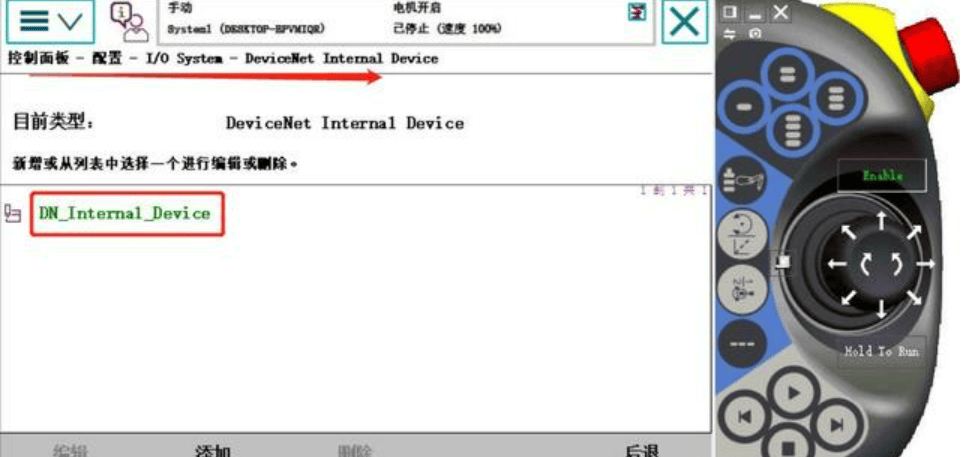
第二步,進入DN_Internal_Device,根據需要修改輸入輸出字節數。
第三步,創建信號時,所在設備選擇DN_Internal_Device。
二、網關配置:
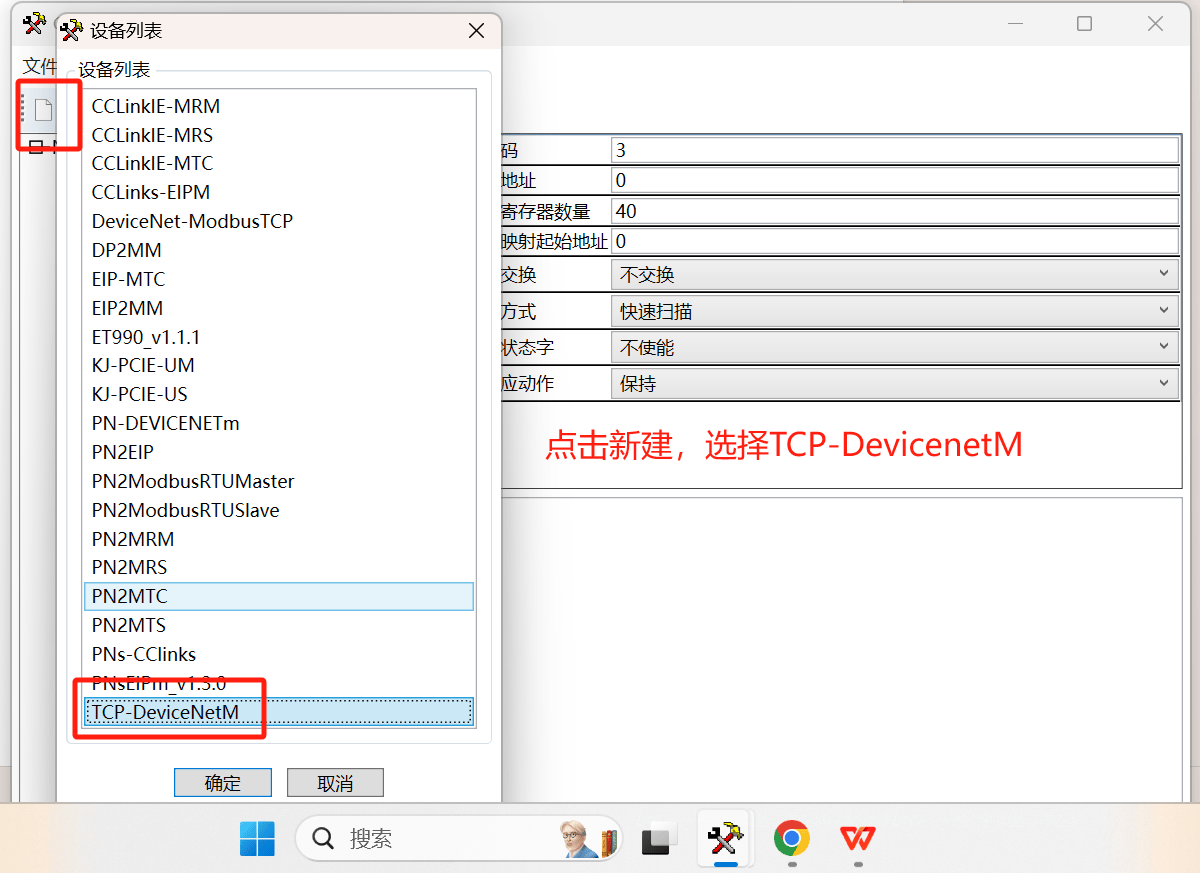
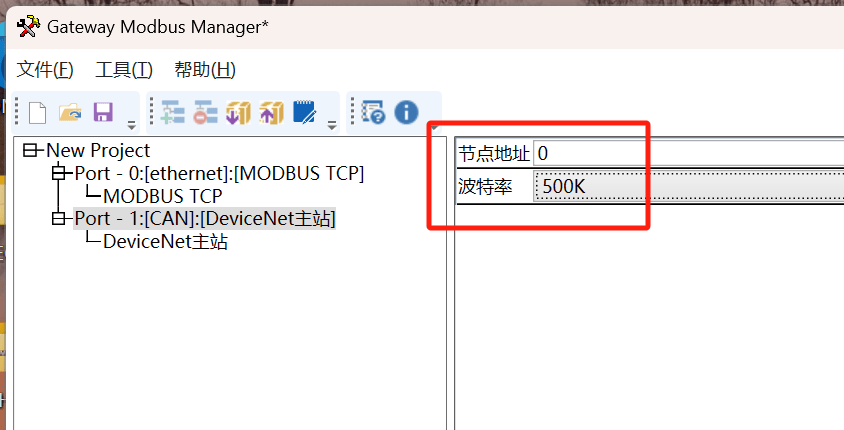
打開網關配置軟件“Gateway Configuration Studio”新建項目選擇TCP-DevicenetM
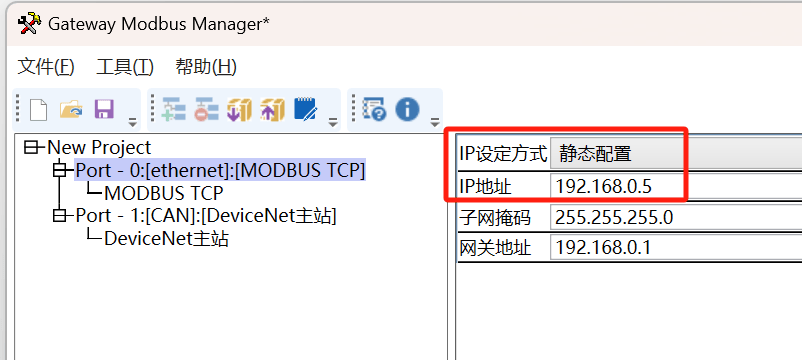
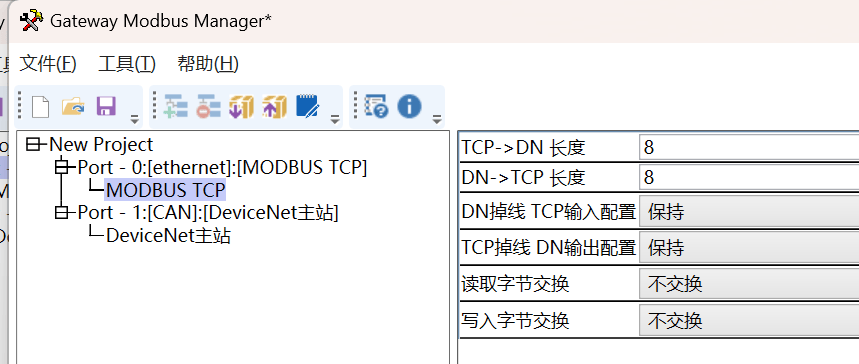
首先設置網關的ModbusTCP一側的IP地址以及數據長度。并設置網關短線后的數據處理方式以及字節交換順序
設置網關的Devicenet節點地址以及波特率,與機器人配置保持一致。
填寫從站參數站地址,數據長度等和從站保持一致。
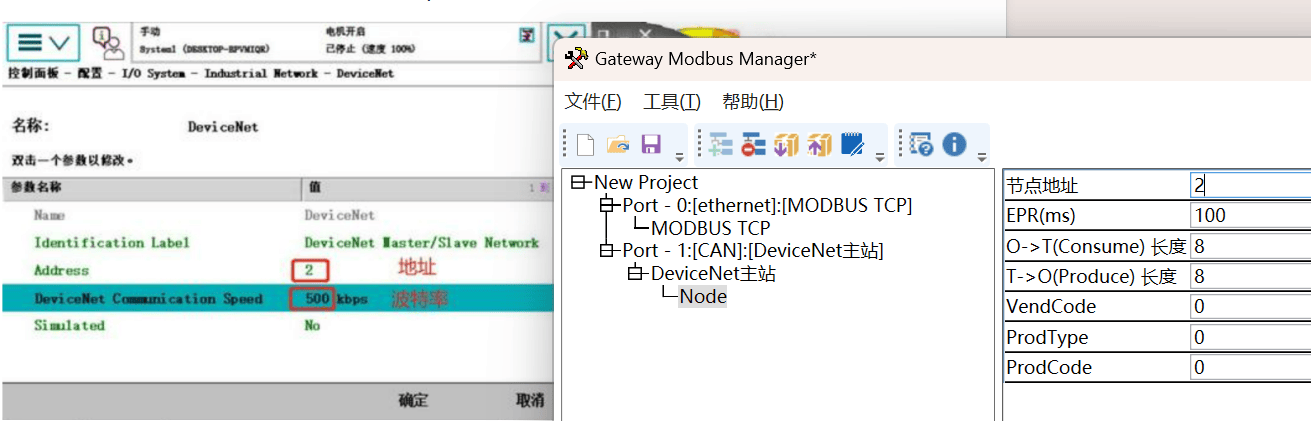
VendCode,ProdType及ProdCode三個參數可在從站eds文件中找到
到此,網關與機器人配置結束,開始配置三菱PLC
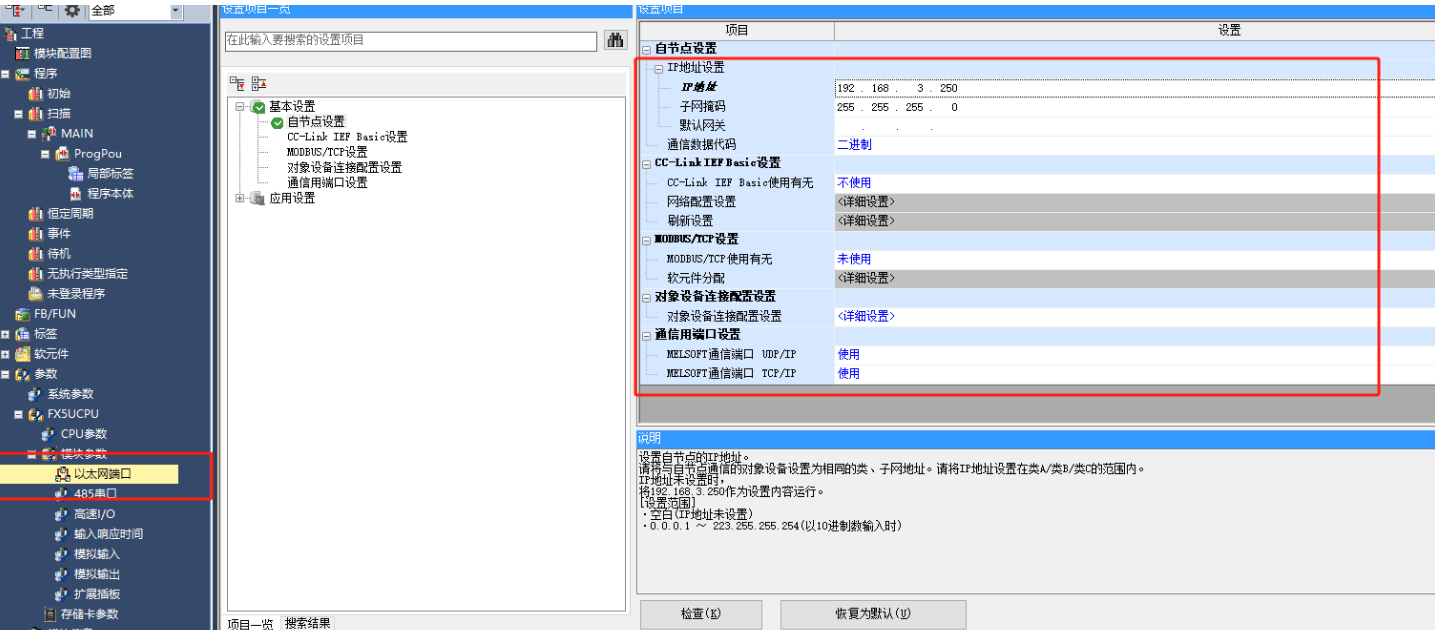
一、PLC本體的IP地址設置
首先需要確認一個概念:PLC本體網口只有一個IP,無論使用什么功能都是共用一個IP。
二、ModbusTCP主站功能
三菱的PLC做ModbusTCP主站功能一般通過程序實現,需要用到“通信協議支持功能”。
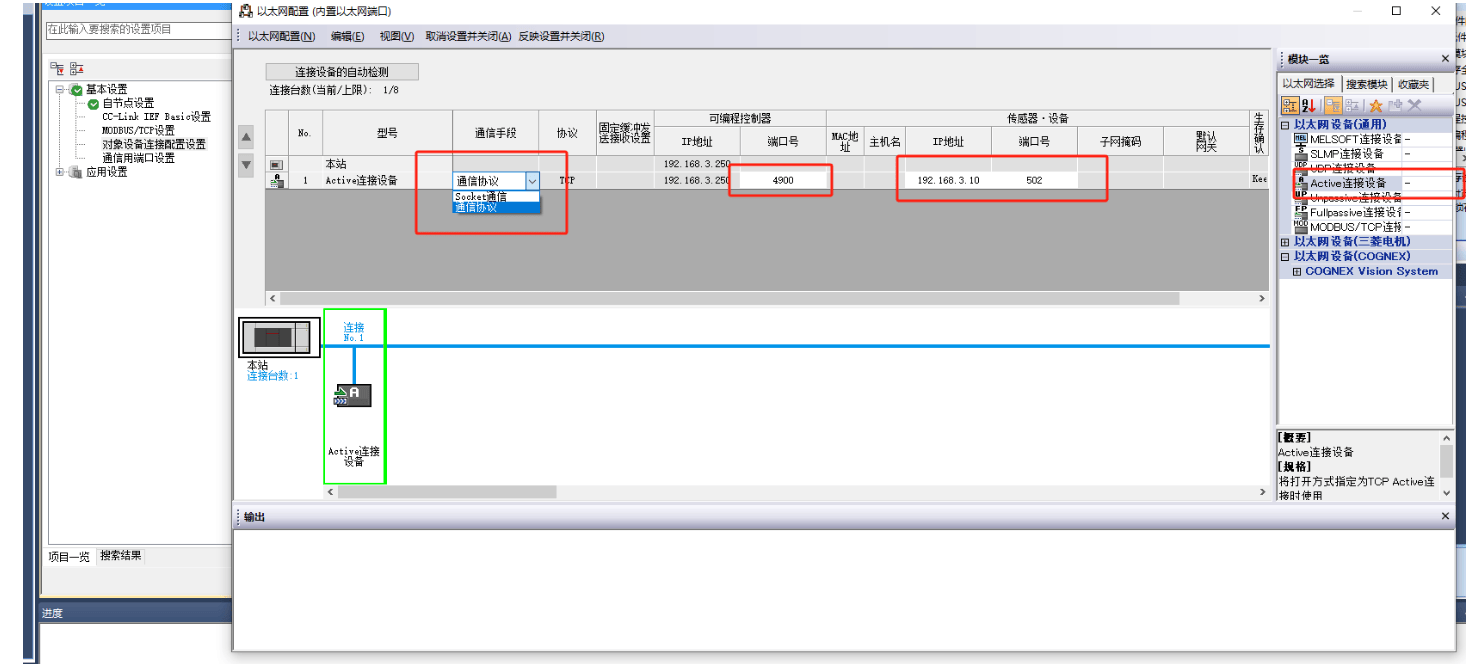
1)在對象設備連接配置設置中添加“Active連接設備”選擇“通信協議”,需要填寫本機的端口號,對方IP以及對方端口號(圖4)。其中本機端口號需要注意不要使用系統默認已經分配的端口。(圖5)
active設備是指主動發起連接的設備
【記得點擊“反應設置并關閉”】
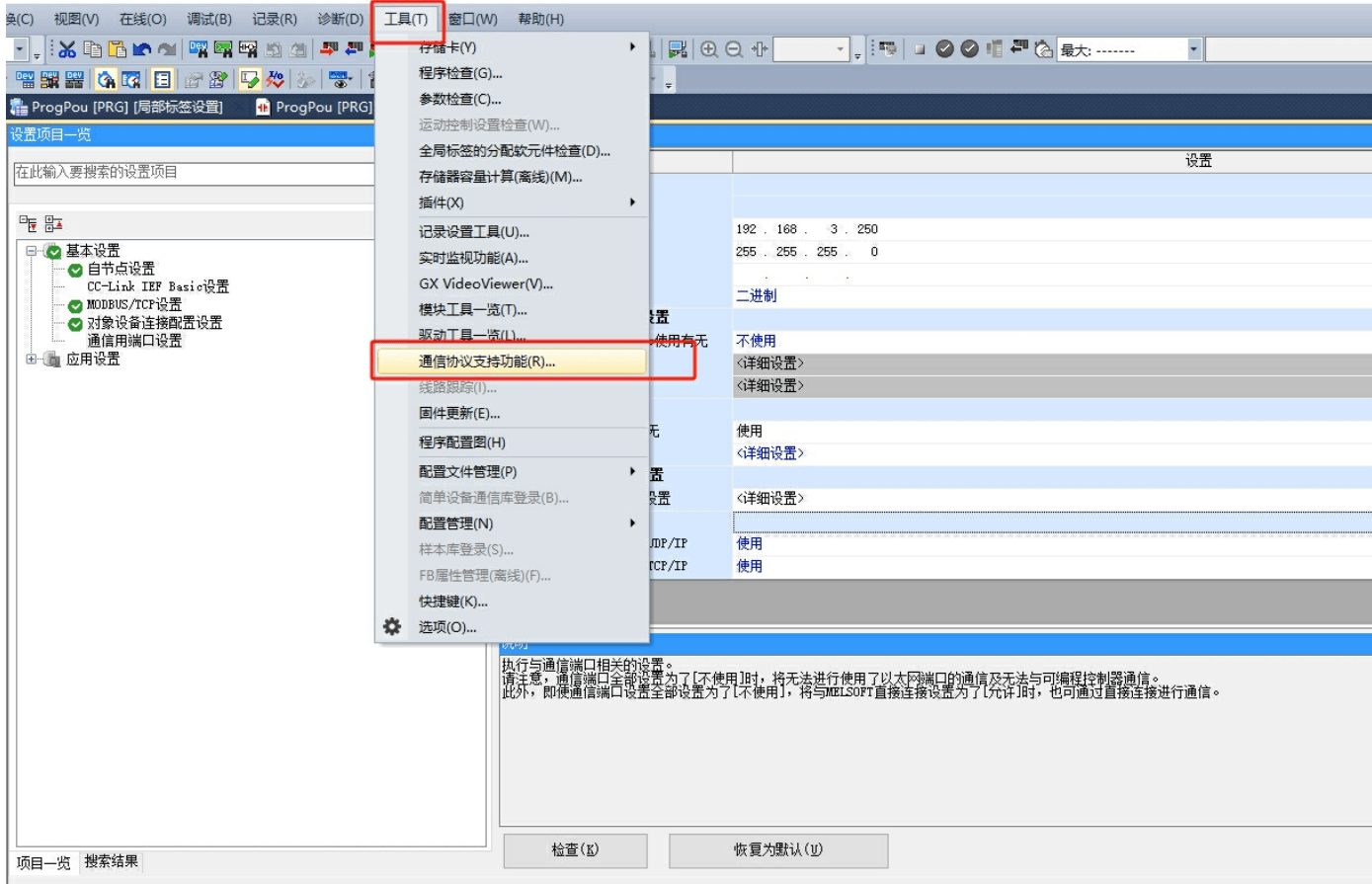
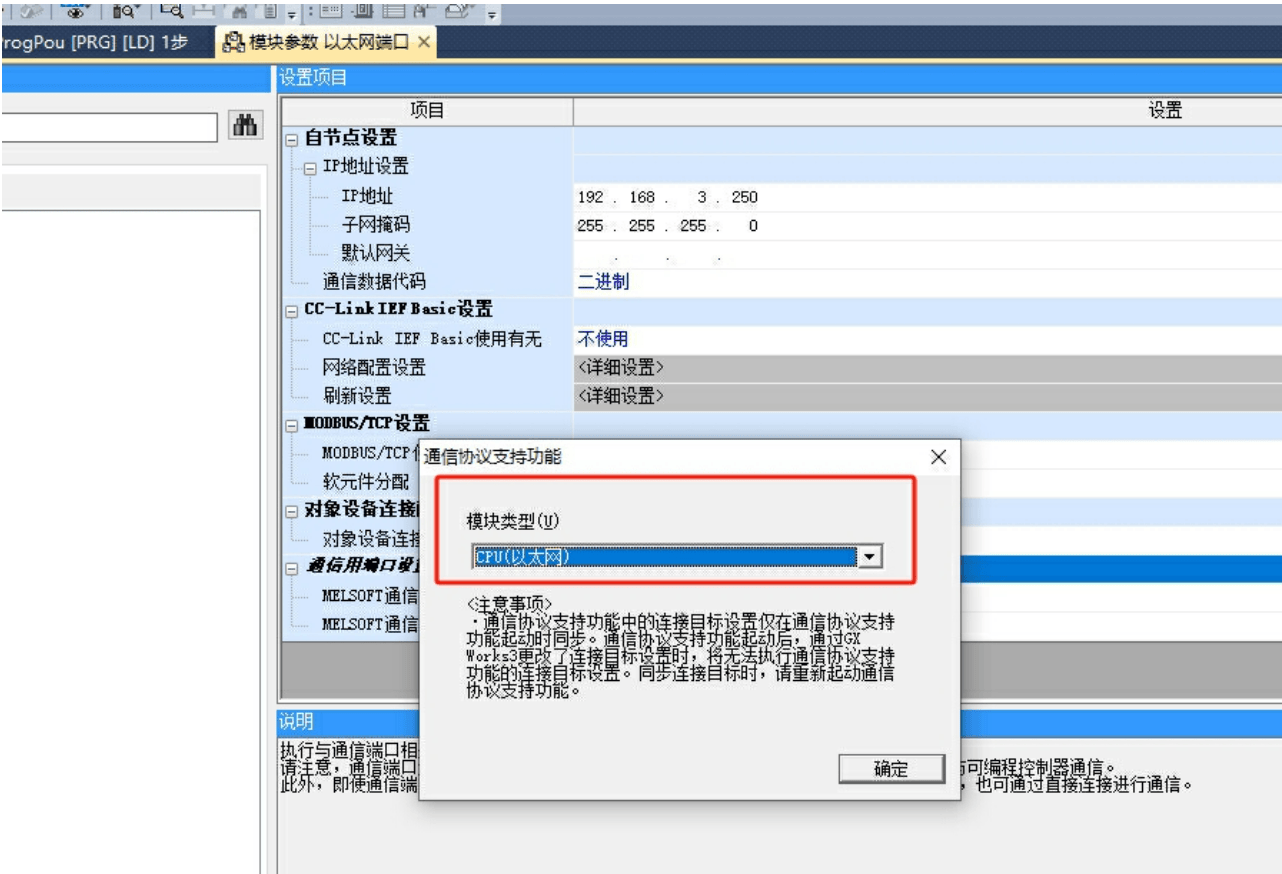
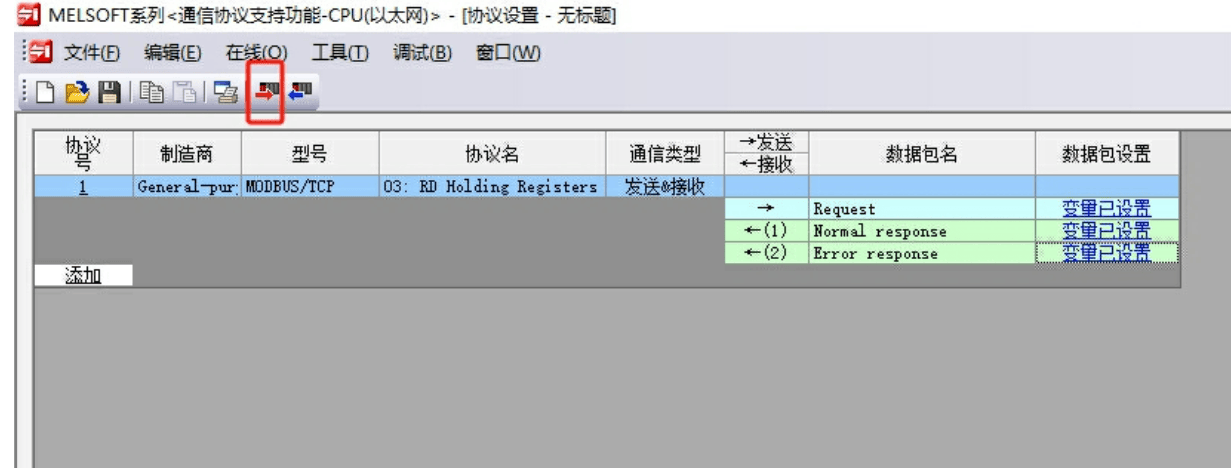
2)打開“通信協議支持功能”,選擇CPU(以太網),并新建,添加協議,選擇ModbsuTCP,選擇功能碼。(圖6-圖7)
3)紅色字“變量未設置”意思為:沒有對這個連接協議分配對應的軟元件用來寫參數和數據存儲用。可以右鍵“軟元件批量設置”,占用其實軟元件后一部分用作通訊協議用。(圖7)
4)分配好后可以點進去看分配的每個軟元件對應的定義,現在以03功能碼D400做起始地址,對主要用到的寄存器做說明,后面一些儲存報錯信息的寄存器可以點開變量設置查看。(圖8)
D400:握手ID,如果是本體以太網口,握手ID就是0,模塊就不是0
D401:從站站號
D402:03功能碼對應就是讀取的寄存器起始Modbus地址
D403:讀取的點數(寄存器數)
D406~D531:儲存讀取到的數據(注意!,D406保存的是數據的個數(數據長度),D407開始才是數據內容)
5)編輯好后通過在線、寫入模塊,將這部分內容寫入PLC
(這部分通信協議編輯,保存的時候是一個獨立的文件,與Works3文件獨立,需要注意關閉這個窗口前記得保存)
6)在程序中建立連接、調用通信協議。
①建立連接,使用SP.SOCOPEN指令,對應關閉連接使用SP.SOCCLOSE指令
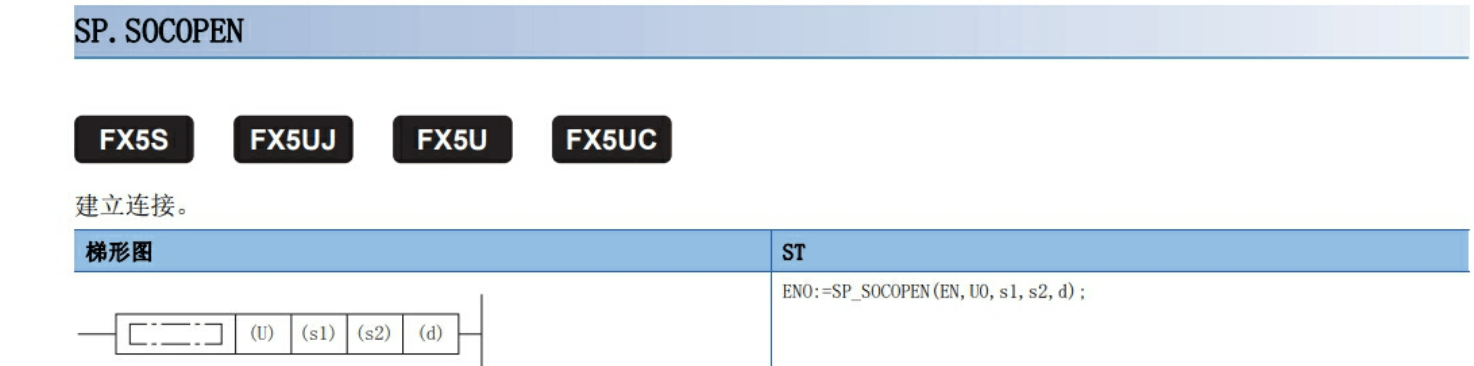

SP.SOCOPEN的第一個操作數沒有實際意義,按照說明填寫“U0”即可;
S1:連接編號對應圖4中的連接編號;
S2:對應OPEN指令的一些參數占用10個寄存器,其中如果我們在圖4中做了參數設置,我們只需要把參數首地址置位0,就可以調用設置好的參數。

其中,SD10680,SD10681是通信打開和請求標志位,在這兩個標志位都沒有導通的情況下我們才執行建立連接的動作。
②通過SP.ECPRTCL指令調用預先設置好的通訊協議。
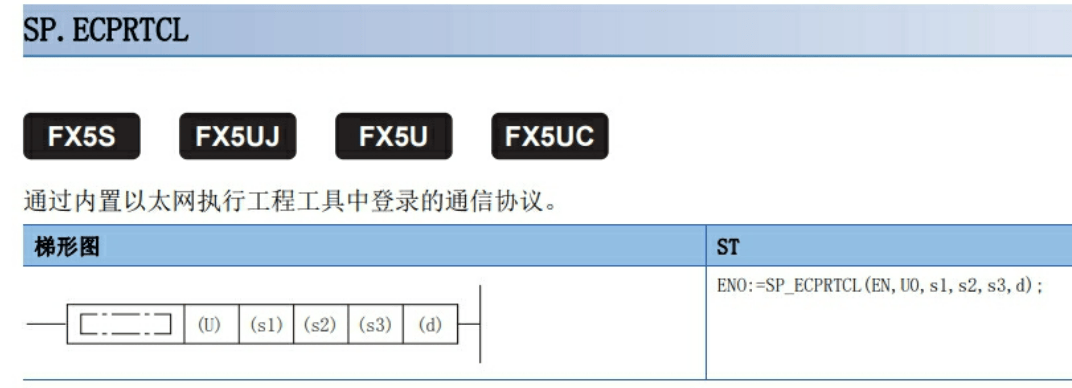

其中
S1 的連接編號是指圖4中的連接編號
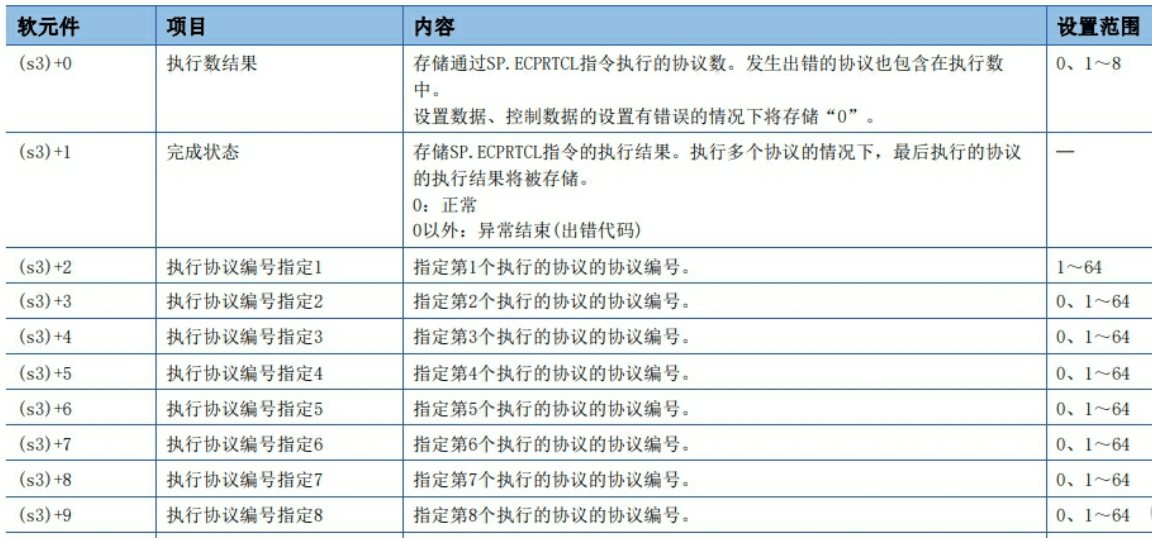
S2 連續執行的協議數是指中S3+2開始的“執行協議編號指定”,如果只有1個就寫K1,并且給S3+2賦值需要執行的協議,對應的是圖8中的協議編號。
下面是通信協議觸發示例
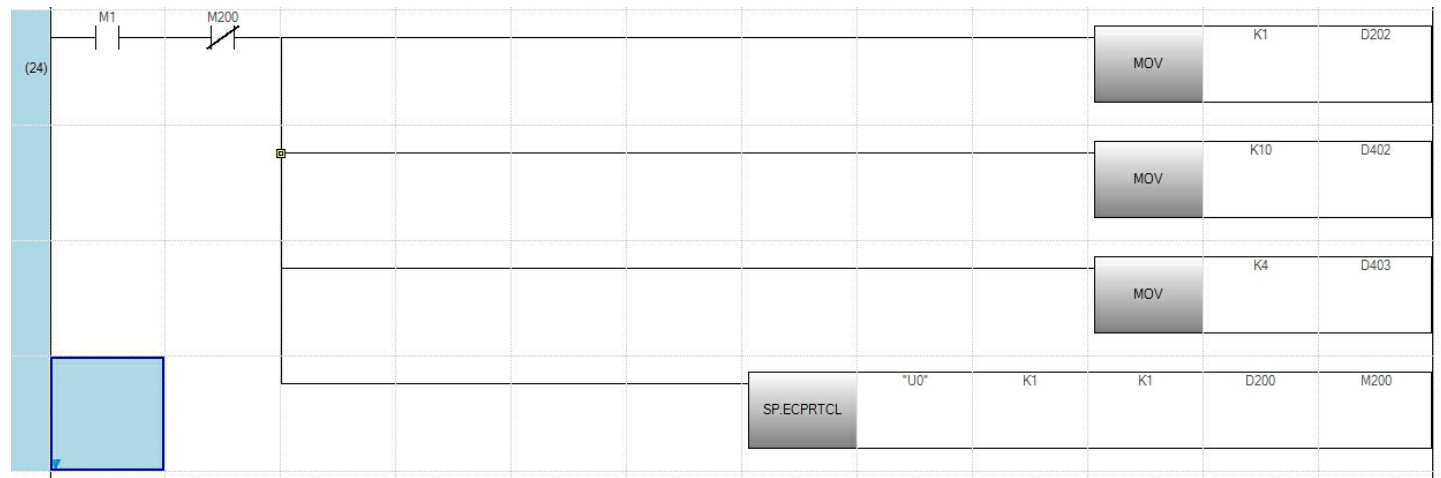
SP.ECPRTCL的第三個操作數為k1,對D202賦值1,表示執行且只執行通信協議1。
D402賦值k10,D403賦值K4,表示從 從站保持寄存器的10地址開始讀取,讀取4個寄存器。
在觸發后,我們可以在D407開始的4個寄存器看到讀取到的值。
點擊工具-通信協議支持功能
選擇好模塊類型
設置好連接變量后下載到PLC
到此,全部配置結束,全部設備上電后,指示燈正常亮起即代表通訊正常。
-
機器人
+關注
關注
213文章
29615瀏覽量
212164 -
三菱PLC
+關注
關注
13文章
246瀏覽量
32073 -
ModbusTCP
+關注
關注
0文章
213瀏覽量
4842
發布評論請先 登錄

開疆智能Profinet轉EthernetIP從網關連接ABB機器人做EtherNet主配置案例
開疆智能Profient轉DeviceNET主網關連接發那科機器人配置案例
開疆智能Profient轉ModbusTCP網關連接ABB機器人MODBUS TCP通訊案例

開疆智能ModbusTCP轉Devicenet網關連接ABB機器人配置案例
開疆智能ModbusTCP轉Devicenet網關連接FANUC機器人配置案例


開疆智能EthereCAT轉ModbusTCP網關連接歐姆龍及三菱PLC案例
開疆智能CCLinkIE轉ModbusTCP網關連接施耐德TCP從站配置案例
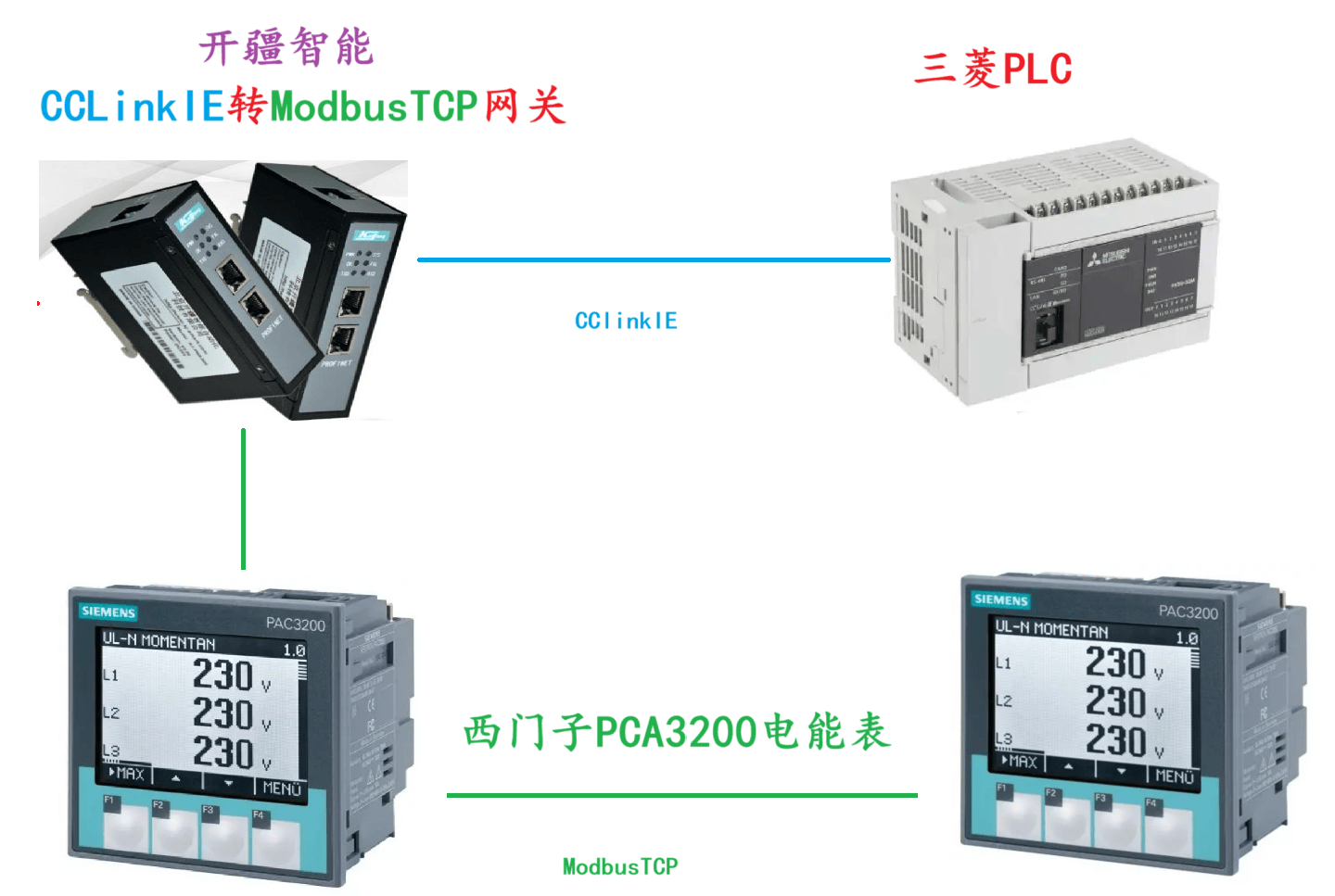
開疆智能CCLinkIE轉ModbusTCP網關連接PCA3200電能表配置案例
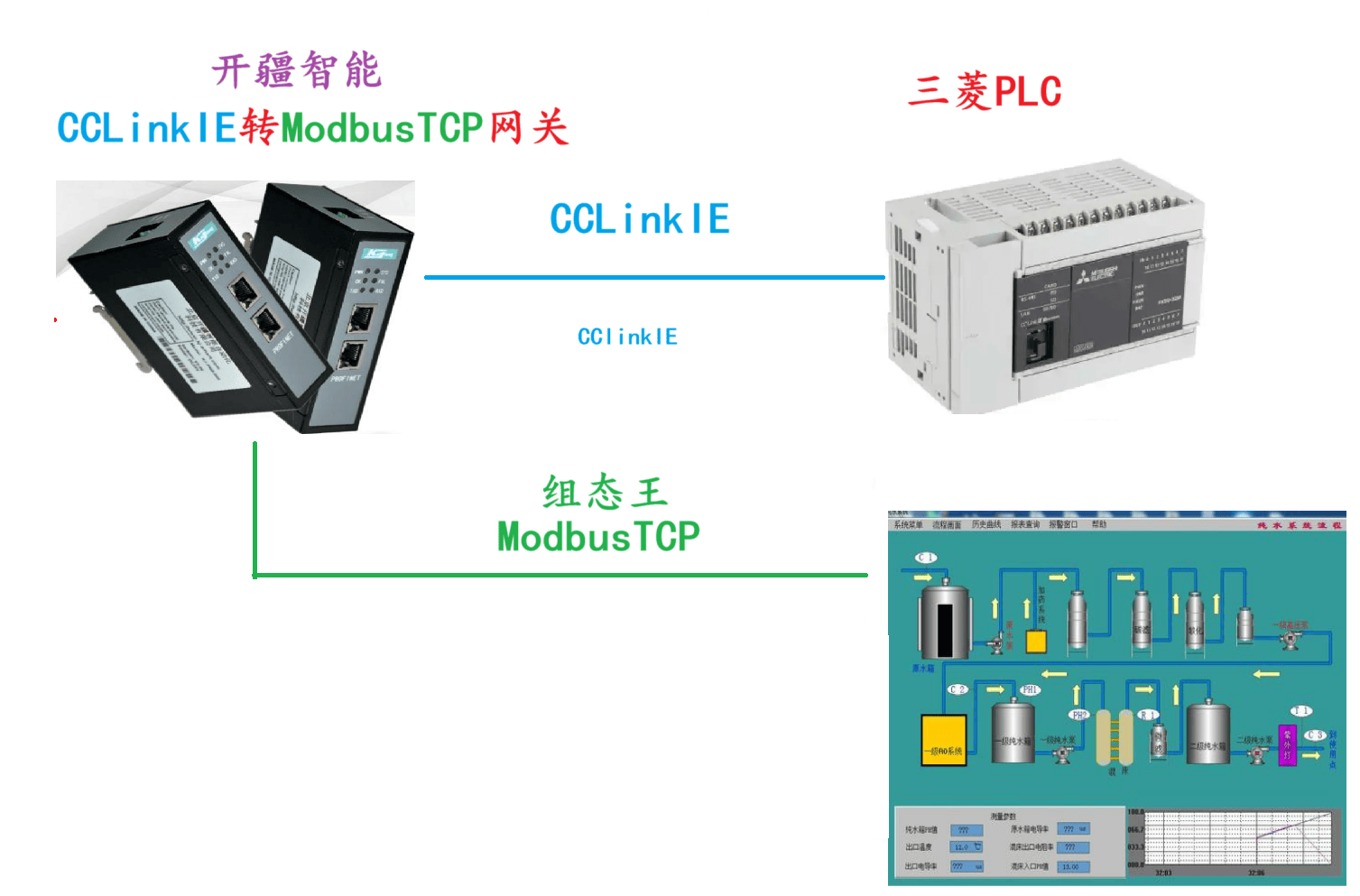
開疆智能CCLinkIE轉ModbusTCP網關連接組態王配置案例
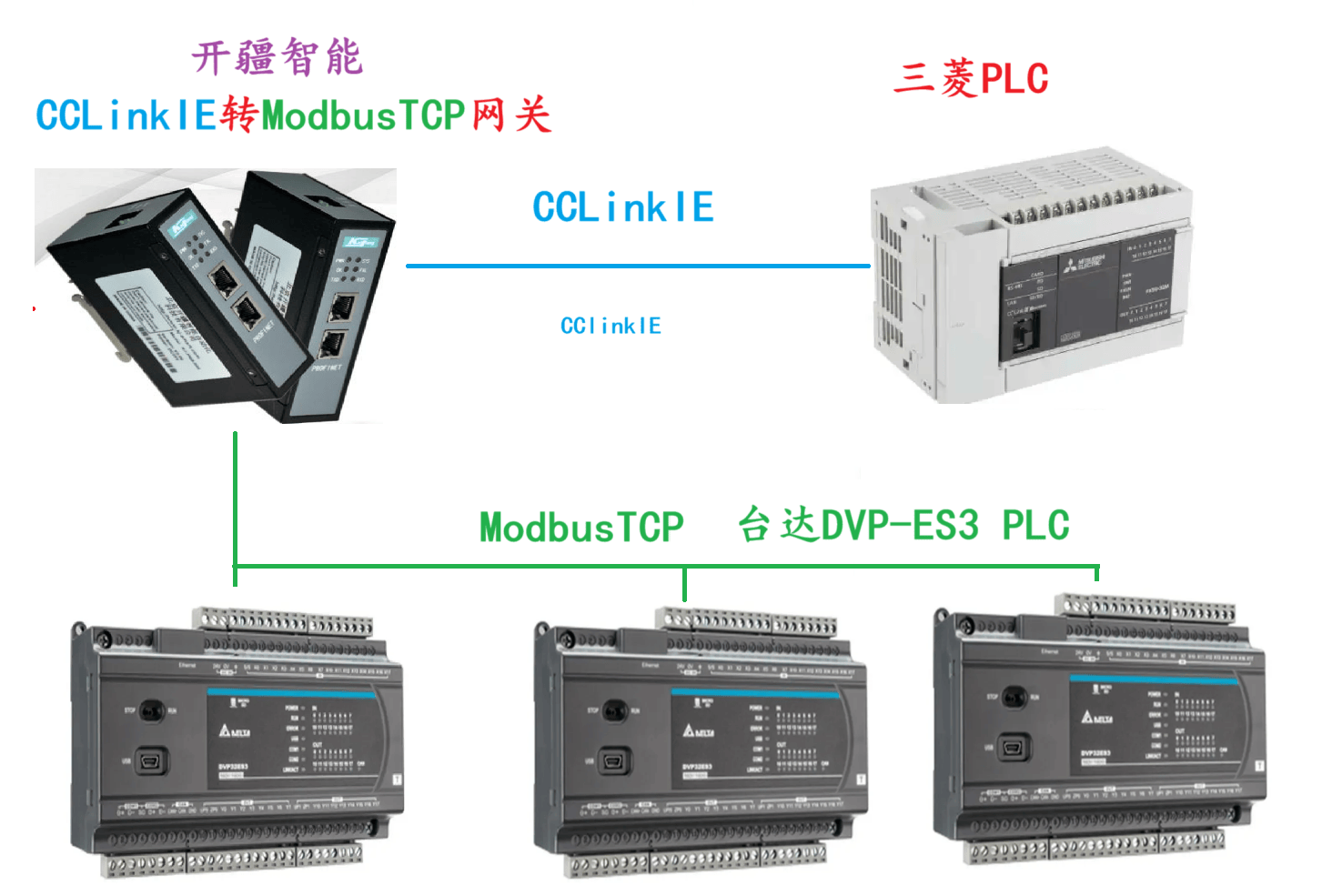
開疆智能ModbusTCP轉CClinkIE網關連接臺達DVP-ES3 PLC配置案例





 工商網監
工商網監
評論