 突破人形機器人物理限制,MPS全棧方案讓開發者無懼三大挑戰
突破人形機器人物理限制,MPS全棧方案讓開發者無懼三大挑戰
電子發燒友網報道(文 / 吳子鵬)作為具身智能的核心載體,2025 年人形機器人領域迎來了歷史性的轉折,正從實驗室走向工業制造、倉儲物流、家庭服務和醫療護理等具體應用場景,標志著全球人形機器人產業進入規模化落地的新紀元。根據 GGII 發布的《2025 年人形機器人產業發展藍皮書》,2025 年全球人形機器人市場銷量預計達到 1.24 萬臺,市場規模達 63.39 億元;到 2035 年,這一數字將飆升至 500 萬臺以上,市場規模突破 4000 億元。

圖源:《2025 年人形機器人產業發展藍皮書》
在政策支持、企業投入與市場需求的多維驅動下,人形機器人正成為繼新能源汽車后的下一個萬億級產業。然而,產業爆發的同時也面臨著嚴峻的技術挑戰。特別是在硬件層面,續航能力不足、空間布局受限和運動精度欠佳三大挑戰,已成為制約產品落地的關鍵瓶頸。為助力開發者構建行業領先的人形機器人系統,全球領先的半導體公司 Monolithic Power Systems, Inc. (MPS) 推出人形機器人全棧式解決方案,覆蓋運動控制、電池管理系統(BMS)、高效電源和靈巧手等設計環節,縮短人形機器人研發上市周期。
人形機器人系統設計的三大挑戰
人形機器人系統是融合多學科技術的復雜體系,其基本構成涵蓋機械結構、驅動系統、感知系統、控制系統、能源系統、人機交互系統、軟件系統等核心模塊。每個核心模塊又包含更為具體的細分組件,例如驅動系統主要為關節提供動力以實現機械運動,其主要結構包括驅動電機、減速器、連接件和傳感器等。
從產品形態來看,人形機器人區別于機械臂、輪式機器人等傳統機器人,大量引入仿生學設計,力求在形態上模擬人類,具備四肢、頭部和靈活的雙手。此外,得益于 AI 大模型技術的持續發展,人形機器人的人機交互性能顯著提升,能夠更自然地與人類交流協作,有效提高工作效率和用戶體驗。盡管在人機交互和環境適應性方面具有天然優勢,但類人形態也給人形機器人設計帶來了一系列復雜的技術挑戰。
首先,人體自然結構精巧,能夠自如地改變各種形態并保持平衡。為達到這種效果,人形機器人采用多自由度設計,若不算靈巧手,上一代人形機器人全身自由度約為 20 - 30 個,而最新亮相的部分人形機器人全身自由度已達 40 - 60 個。對于開發者而言,更高的自由度意味著需要在狹小空間內集成更多電機驅動系統,同時還需更高精度的產品來應對雙足行走和高難度動作時的動態平衡問題。
多自由度設計要求人形機器人全身關節需同時滿足高力矩輸出與低慣量的要求。以雙足行走為例,此時人形機器人需在單腿支撐的 “動態平衡” 狀態下完成重心轉移,這就需要高精度的電機驅動系統配合復雜的零力矩點(ZMP)控制、步態規劃等算法,實時調整關節的力矩和位置。當人形機器人進行空翻、回旋踢等高難度動作時,對關節驅動設計的精度要求進一步提升。
同時,多自由度使得肩部、肘部等主要關節部位需要集成更多電機,對電機方案的集成化和小型化提出了更高要求。目前,行業主流方案是在一個關節模組里集成 RV 減速器、驅動電機、FOC 驅動控制器和高精度磁編碼器等元件,這種方案整體性更好,能有效應對部署空間狹小的挑戰。
相較于軀體設計,同樣具備多自由度的靈巧手在精度和小型化方面有著更為艱巨的挑戰。靈巧手模仿人手設計,人手共有 24 個自由度,包括拇指 5 個自由度,其余 4 指各 4 個自由度,以及腕的外展、腕的彎曲和手掌的弧度 3 個自由度。為使靈巧手盡可能靈活,目前主流方案多采用 17 - 24 個自由度設計以實現多自由度運動,而這些關節電機需在指尖至手掌的狹小空間內密集排布,這也是體型小巧的空心杯電機在靈巧手方案中被廣泛應用的主要原因。
除了空間和精度挑戰,人形機器人面臨的第三個共性難題是續航。在 2025 年 4 月于北京舉辦的全球首個人形機器人半程馬拉松賽事中,為解決續航問題,允許參賽機器人在比賽過程中更換電池,但換電池時間會計入總用時。通用性和環境適應性的高要求讓人形機器人多采用搭載電池的方式,然而人形機器人軀體空間有限,導致搭載的電池容量受限。當前大部分人形機器人產品的標稱續航僅為 2 - 6 小時。為進一步提升續航能力,一方面需要研發更高能量密度的電池,提升BMS的管理水平;另一方面提高人形機器人的能效水平也至關重要。
MPS 讓人形機器人運動控制更靈敏
芯片是人形機器人系統的核心硬件之一,其性能直接決定了機器人的運動精度、環境適應能力和智能化水平。為幫助開發者應對上述關鍵挑戰,MPS 公司推出一系列兼具小體積和高性能、高效率的芯片方案,涵蓋用于智能大腦的多相電源、高效的 DC/DC 電源方案、運動控制方案以及 BMS 方案等。
如前文所述,目前市場前沿的人形機器人全身已具備數十個自由度,重點關節需集成多個電機,每個電機系統需實現高效率、高精度的電流環、速度環、位置環控制,并滿足小型化要求。為此,MPS 公司推出了100V 半橋驅動器 MP6539 、柵極驅動器 IC MP1918 、TMR 磁角度傳感器 MA600A 和線性霍爾效應電流傳感器 MCS1823 等產品。
MP6539專為三相無刷直流電機驅動器應用設計,能夠驅動由六個 100V N - 通道功率 MOSFET 組成的三個半橋。它支持 100V 工作電壓、120V VBST 最大電壓,具備 0.8A/1A 驅動和灌電流能力;支持電池供電應用的低功率休眠模式,Isleep 休眠電流 ≤1μA;擁有可調節的死區時間控制、可編程過流保護(OCP)、故障指示輸出等關鍵功能;提供 TSSOP - 28(9.7mmx6.4mm)和 QFN - 28(4mmx5mm)兩種封裝形式可供選擇。
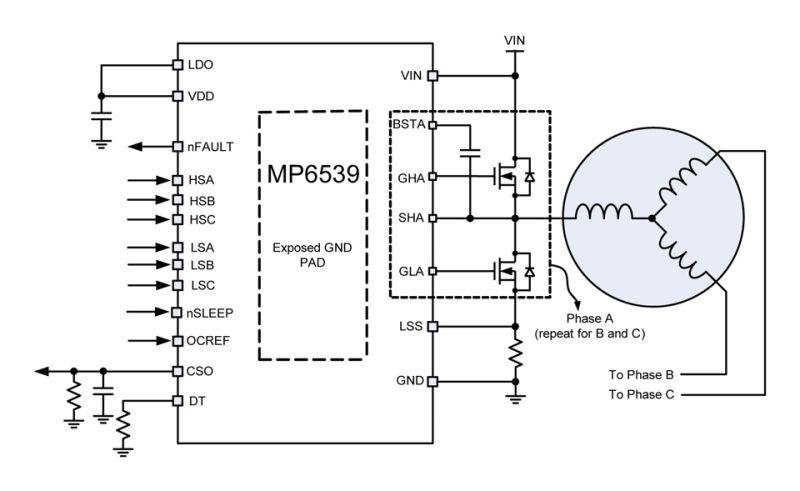
MP6539 應用框圖,圖源:MPS
MP1918用于在半橋或同步應用中驅動具有低柵極閾值電壓的增強型氮化鎵(GaN)FET 或 N 通道 MOSFET。其工作電壓范圍為 3.7V 至 5.5V VCC,提供獨立的上管(HS)和下管(LS)TTL 輸入以及兩個獨立柵極輸出,可實現可調導通 / 關斷功能。MP1918 的 Sink/Source 電流能力出色,分別達到 1.6A 和 5A,能夠更好地匹配負載以維持驅動信號穩定。該器件采用側面鍍錫的 QFN - 14(3mmx3mm)封裝。
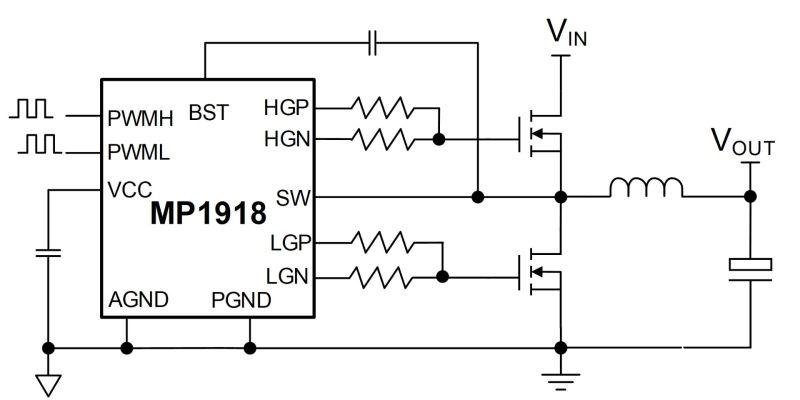
MP1918 應用框圖,圖源:MPS
MA600A是一款高精度、高帶寬的 TMR 磁角度傳感器,可助力驅動電機精準檢測角度和位置。該器件經過工廠校準,在全溫工作范圍內誤差(INL)低于 0.6°,若使用片上 32 點查找表進行用戶校準后,誤差可小于 0.1°。MA600A 支持多種磁場強度和裝配方式,包括軸端(同軸)和側軸(離軸)安裝,可通過串行外設接口(SPI)和同步串行接口(SSI)進行通信,并支持菊花鏈配置。該器件采用超小型 QFN - 16(3mmx3mm)封裝。
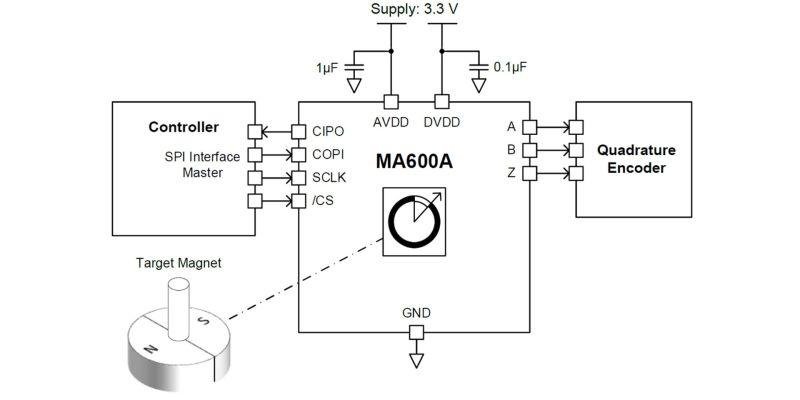
MA600A 應用框圖,圖源:MPS
MCS1823是一款超小尺寸封裝、帶有過流檢測功能的線性霍爾效應電流傳感器,支持 3.3V 或 5V 單電源供電,最大額定電流為 50A,0.6mΩ 的低電阻原邊導體允許大電流在包含高精度霍爾傳感器的 IC 附近流動。同時,MCS1823 具有快速過流檢測(OCD,1μs 響應時間)特性,可輕松監測系統的過流事件。超小尺寸的 TQFN - 12(3mmx3mm)封裝使其能夠輕松應對各種空間受限應用。
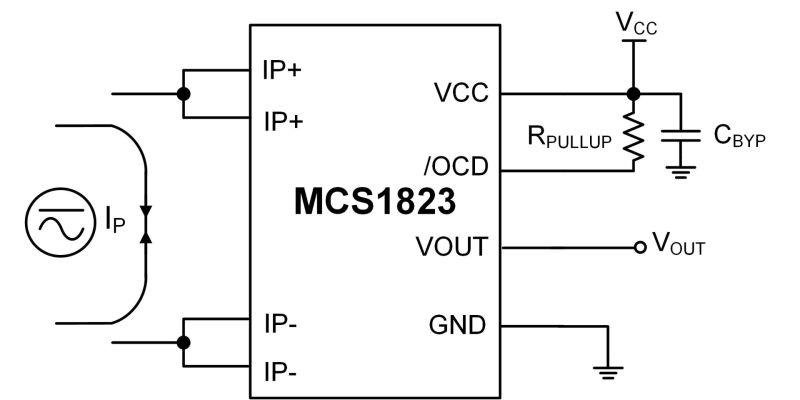
MCS1823 應用框圖,圖源:MPS
借助這些器件,開發者能夠實現高精度、高可靠、小尺寸的運動控制方案,使人形機器人的運動更加平穩、靈活。
MPS 賦能人形機器人長續航設計
除高精度和小型化外,人形機器人的續航水平也亟待提升,主要可通過兩條途徑實現:一是提升全身、智能大腦等方面的電源效率;二是增強電池管理系統(BMS)的管理水平。MPS 公司依托先進的半導體工藝實現的低功耗、高功率密度電源方案,從機器人所需外設輔助供電模塊 MPM54304、關節驅動供電同步降壓變換器 MP4583,到機器人大腦 SOC 多相電源控制器 MPQ2967 和 DrMOS MPQ86960 等產品,可有效幫助提升人形機器人全身的電源效率。
MPM54304電源管理模塊集成了降壓 DC/DC 變換器、電感和邏輯接口,最大限度減少了外部元器件的使用數量。該模塊支持 3V - 16V 的寬輸入范圍和 0.55V - 5V 的寬輸出范圍,輸出電壓可通過 I2C 總線進行調節。MPM54304 的通道 1 和 2 可提供 3A 連續電流,支持并聯;通道 3 和 4 可提供 2A 連續電流,支持并聯。該器件采用節省空間的 LGA(7mmx7mmx2mm)封裝。
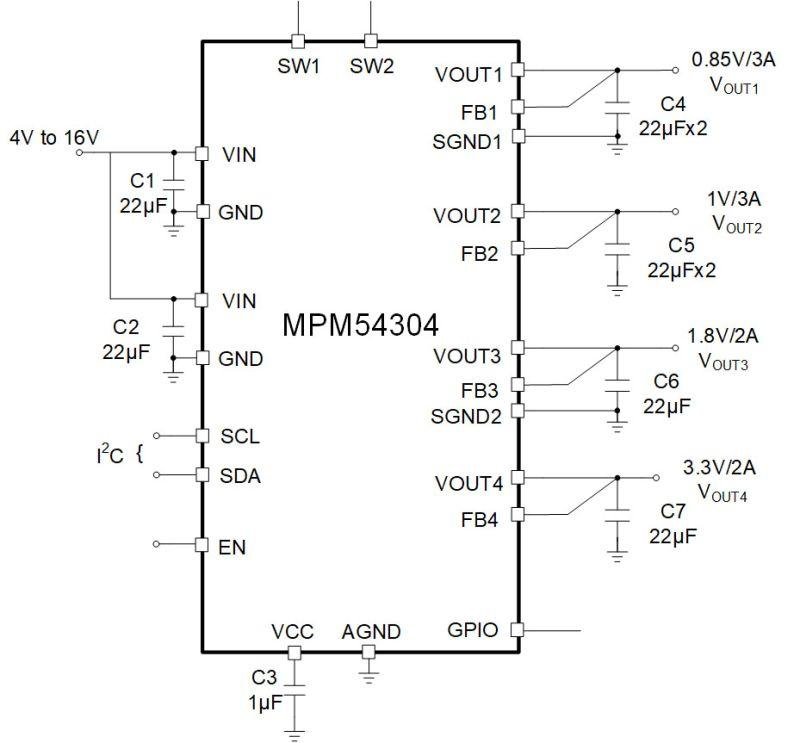
MPM54304 應用框圖,圖源:MPS
MP4583具有 8μA 的靜態電流(IQ),支持 4.5V 至 100V 的輸入電壓(VIN)范圍,以及 0.8V 至 35V 的輸出電壓(VOUT)范圍,適用于 2A/3A 負載的降壓設計。該器件提供可選的節能模式(PSM)或強制連續導通模式(FCCM),其中強制連續導通模式可助力實現輕載條件下的小輸出紋波。該器件采用 QFN - 19(3mmx5mm)的超小型封裝。
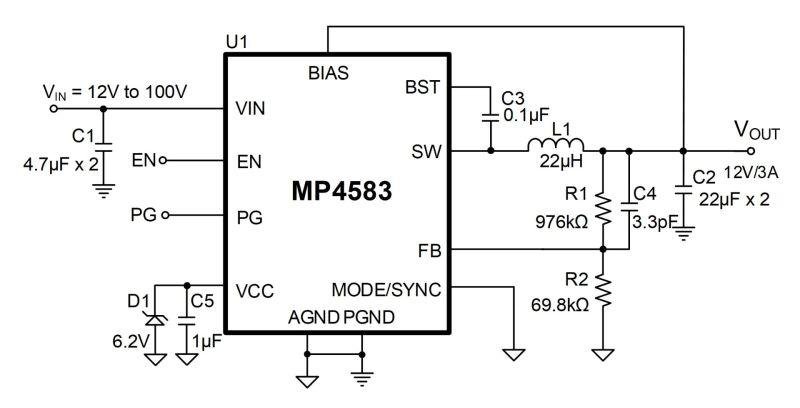
MP4583 應用框圖,圖源:MPS
智能大腦是人形機器人的核心控制系統,包含處理器、傳感器、通信模塊和算法決策單元等關鍵部件,這些組件對電源的穩定性、可靠性和能效要求極高。面向人形機器人智能大腦的多相電源應用,MPS 公司推出帶串行接口的數字 4 相控制器 MPQ2967 、50A 單片半橋 Intelli - Phase? 解決方案MPQ86960,以及 6 通道 ASIL - D 電壓監測器 MPQ79500等方案,特征性能如下:
MPQ2967最多可配置為 4 相以雙軌運行,可與 MPS Intelli - Phase? 產品配合使用,以最少的外部組件實現多相穩壓器(VR)解決方案,同時具備欠壓鎖定(UVLO)保護、過壓保護(OVP)、欠壓保護(UVP)、過流保護(OCP)、過溫保護(OTP)、反向電壓保護(RVP)等功能。
MPQ86960內置功率 MOSFET 和柵極驅動,可優化死區時間(DT)并降低寄生電感,從而實現高效率,同時該器件可在寬輸入電壓(VIN)范圍內實現高達 50A 的連續輸出電流(IOUT),由于采用 LGA - 38(5mmx6mm)小體積封裝,可實現高功率密度方案設計。
MPQ79500專為需要監測電壓軌以確保安全的應用而設計,輸入電壓(VIN)范圍為 2.7V 至 5.5V,6 個電壓監測器輸入可分為 4 個單端輸入和 2 個差分輸入,每個電壓監測器輸入都具有可配置的過壓(OV)閾值和欠壓(UV)閾值。該器件的封裝尺寸為 QFN - 16(3mmx3mm)。
在電池管理系統(BMS)方面,MPS 公司的高性能模擬前端(AFE) MP2793、高精度多節電芯電量計MPF4278X等器件,可助力開發者實現方案創新。
MP2793具有高達 50mA 的內部電池均衡功能,支持 7 - 16 節電池包監測及全方位保護,支持 FET 軟啟動放電控制以消除預充電電路,其雙 ADC 架構可實現嚴格同步的電流 / 電壓測量,用于阻抗測量。MP2793 可與MPF4278X配合使用,后者可兼容任何 AFE 實現精準的電量預估,支持 2s 到 16s 電芯(最高支持 112s 版本),可對每節電芯實現 SOC 計算以及整個 PACK SOC 計算,提升 SOH、SOC、峰值功率、電池內阻的估算精度。
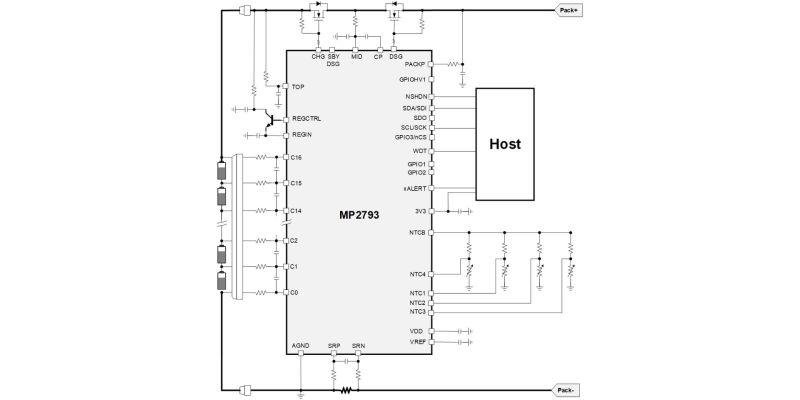
MP2793 應用框圖,圖源:MPS
MPS 助力實現領先的靈巧手設計
靈巧手是模擬人類手部功能的高自由度機械裝置,不僅是人形機器人系統的重要組成部分,其應用也不局限于人形機器人。根據中商產業研究院的數據,2024 年全球機器人靈巧手出貨量約 76 萬只,市場規模為 17 億美元;預計到 2030 年出貨量將突破 141 萬只,市場規模達 30 億美元。
目前靈巧手的自由度超過 20 個,過多的自由度給機械設計、驅動和控制方案帶來了極大的設計難度。為此,MPS 推出空心杯電機驅動 MP6540H、角度傳感器 MA900、一體化方案 MMP1RH-XXXX-XXXX 和 100V 同步 buck 降壓控制器 MP993x 等產品。
MP6540H為 3 相直流無刷電機驅動器,集成了由 6 個 N - 溝道功率 MOSFET 組成的三個半橋、預驅動器、柵極驅動電源和電流采樣放大器。該器件可提供高達 6A 的峰值電流和 5A 連續輸出電流,使用內部電荷泵為上管 MOSFET 生成柵極驅動電源電壓,并采用涓流充電電路維持足夠的柵極驅動電壓,以實現 100%占空比操作。該器件采用QFN-26 (5mmx5mm)封裝。
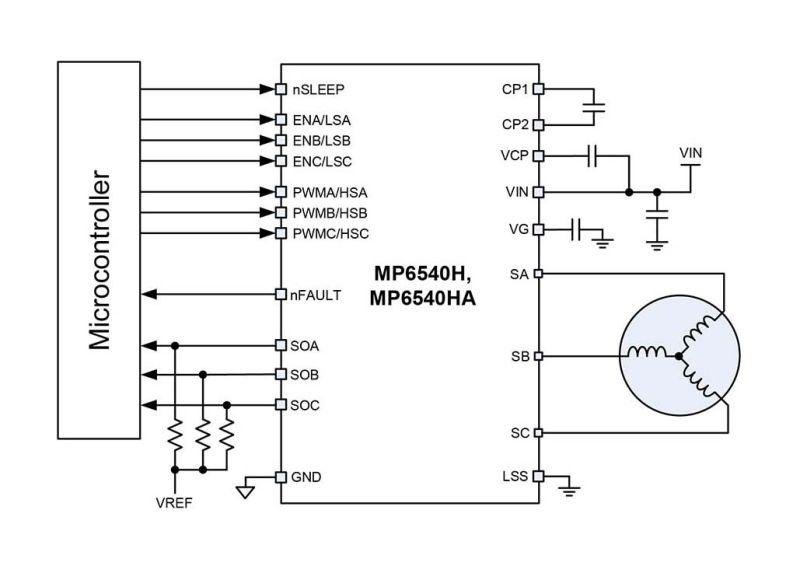
MP6540H 應用框圖,圖源:MPS
MA900可為靈巧手的關節電機提供高精度的位置檢測,其角度數據從傳感器 IC 上多個位置的磁場差異中提取,這種差分法消除了寄生磁場的影響,對超過 4kA/m DC 或 5mT 的寄生雜散磁場不敏感,可提供零滯后的結果輸出。MA900 通過片上非易失性存儲器(NVM)存儲設置參數,如參考零角度位置、ABZ 編碼器設置和 UVW 仿真配置,其中 ABZ 正交編碼器接口可配置每圈脈沖數(PPT),UVW 接口支持 1 到 8 極對仿真。該器件采用 QFN - 16(3mmx3mm)封裝。
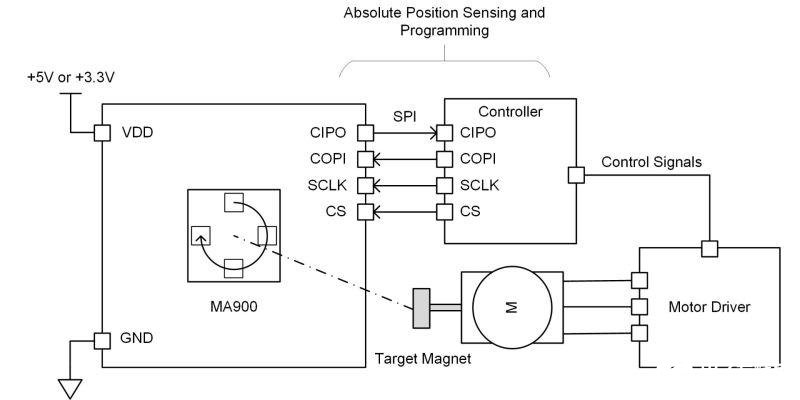
MA900 應用框圖,圖源:MPS
一體化方案 MMP1RH-XXXX-XXXX 作為靈巧手一體化空心杯電機驅動模組,集成 FOC 算法、編碼器,整體方案直徑僅 9mm,滿足靈巧手的小型化要求,并可通過 RS485 通信接口進行信息傳輸。
MP993x 是可廣泛用于 GPU 供電、靈巧手、外設等輔源的 100V 同步 buck 降壓控制器,具有 100k - 1Mhz 可調工作頻率和 USM/PSM/CCM 可選工作模式,支持 0.8V - 80V 輸出,適用于 1W - 300W 降壓電源設計,并提供可調節斜波補償和電流限引腳功能。該器件采用 QFN - 23(4mmx4mm)的超小封裝。
結語
在人形機器人從概念邁向現實應用的進程中,MPS 推出的全棧式解決方案精準突破了人形機器人設計的物理限制。這些高性能、高效率、小體積的芯片產品,為人形機器人的高效運動控制、高功率密度電源設計、充分的能量利用以及領先的靈巧手設計提供了堅實保障,幫助開發者應對空間與精度挑戰,并攻克續航難題,推動人形機器人產業朝著規模化落地大步邁進,使其在更多領域綻放光彩。
-
MPS
+關注
關注
26文章
290瀏覽量
65668 -
人形機器人
+關注
關注
7文章
693瀏覽量
17486
發布評論請先 登錄
大象機器人攜手進迭時空推出 RISC-V 全棧開源六軸機械臂產品

ADI如何重塑人形機器人運動核心
泰克科技全鏈路測試解決方案助力人形機器人發展
大象機器人攜手進迭時空推出 RISC-V 全棧開源六軸機械臂產品
NVIDIA發布GR00T N1基礎模型等方案,人形機器人開發效率顯著提升
NVIDIA Isaac GR00T N1開源人形機器人基礎模型+開源物理引擎Newton加速機器人開發
伺服電動缸在人形機器人中的應用
優必選與UQI優奇發布全棧式無人物流解決方案
UQI優奇重磅發布全棧式無人物流解決方案
“0元購”智元靈犀X1機器人,軟硬件全套圖紙和代碼全公開!資料免費下載!
100T極致算力+全鏈路開發支持,地瓜機器人為具身智能造“基座”
NVIDIA 加速人形機器人發展






 工商網監
工商網監
評論