 Ubuntu系統安裝Docker詳細攻略,觸覺智能RK3568開發板演示
Ubuntu系統安裝Docker詳細攻略,觸覺智能RK3568開發板演示
本文介紹Ubuntu系統安裝Docker方法,使用觸覺智能EVB3568鴻蒙開發板演示,搭載瑞芯微RK3568,四核A55處理器,主頻2.0Ghz,1T算力NPU;支持開源鴻蒙OpenHarmony3.2-5.0,以及Linux、Android等操作系統,接口豐富,開發評估快人一步!
內核配置
1、使用check_config.sh腳本檢查當前內核配置是否適配Docker,該腳本可從github下載:
https://github.com/opencontainers/runc/blob/main/script/check-config.sh
2、將下載好的配置腳本文件放到如下圖目錄:

3、配置一個帶Docker配置的內核文件
kernel目錄下會有一個.config文件,該文件記錄了內核目前的配置,最終編譯使能的配置也是根據該.config文件,而這個.config文件的內容由 kernel/arch/arm64/configs 中的配置文件決定。
cd kernel/arch/arm64/configs cp rockchip_linux_evb3568v1_defconfig rockchip_linux_evb3568v1_docker_defconfig
執行我們下載好的腳本,檢測新復制的defconfig文件,然后編輯該defconfig文件,將missing的選項添加進去,直到./check_configs.ch不出現missing。
c./check_config.sh ./kernel/arch/arm64/configs/rockchip_linux_evb3568v1_docker_defconfig info: reading kernel config from arch/arm64/configs/rockchip_linux_evb3568v1_defconfig ... Generally Necessary: - cgroup hierarchy: properly mounted [/sys/fs/cgroup] - apparmor: enabled and tools installed - CONFIG_NAMESPACES: enabled - CONFIG_NET_NS: enabled - CONFIG_PID_NS: enabled - CONFIG_IPC_NS: enabled - CONFIG_UTS_NS: enabled - CONFIG_CGROUPS: enabled - CONFIG_CGROUP_CPUACCT: enabled - CONFIG_CGROUP_DEVICE: enabled - CONFIG_CGROUP_FREEZER: enabled - CONFIG_CGROUP_SCHED: enabled - CONFIG_CPUSETS: enabled - CONFIG_MEMCG: enabled - CONFIG_KEYS: enabled - CONFIG_VETH: enabled - CONFIG_BRIDGE: enabled - CONFIG_BRIDGE_NETFILTER: enabled - CONFIG_IP_NF_FILTER: enabled - CONFIG_IP_NF_TARGET_MASQUERADE: enabled - CONFIG_NETFILTER_XT_MATCH_ADDRTYPE: enabled - CONFIG_NETFILTER_XT_MATCH_COMMENT: missing - CONFIG_NETFILTER_XT_MATCH_CONNTRACK: enabled - CONFIG_NETFILTER_XT_MATCH_IPVS: enabled - CONFIG_IP_NF_NAT: enabled - CONFIG_NF_NAT: enabled - CONFIG_POSIX_MQUEUE: enabled - CONFIG_OVERLAY_FS: enabled Optional Features: - CONFIG_USER_NS: enabled - CONFIG_SECCOMP: enabled - CONFIG_SECCOMP_FILTER: enabled - CONFIG_CGROUP_PIDS: enabled - CONFIG_MEMCG_SWAP: enabled - CONFIG_MEMCG_SWAP_ENABLED: missing (note that cgroup swap accounting is not enabled in your kernel config, you can enable it by setting boot option "swapaccount=1") - CONFIG_BLK_CGROUP_IOCOST: missing - CONFIG_BLK_CGROUP: enabled - CONFIG_BLK_DEV_THROTTLING: enabled - CONFIG_CGROUP_PERF: enabled - CONFIG_CGROUP_HUGETLB: enabled - CONFIG_NET_CLS_CGROUP: enabled - CONFIG_CGROUP_NET_PRIO: enabled - CONFIG_CFS_BANDWIDTH: enabled - CONFIG_FAIR_GROUP_SCHED: enabled - CONFIG_RT_GROUP_SCHED: enabled - CONFIG_IP_NF_TARGET_REDIRECT: enabled - CONFIG_IP_VS: enabled - CONFIG_IP_VS_NFCT: enabled - CONFIG_IP_VS_PROTO_TCP: enabled - CONFIG_IP_VS_PROTO_UDP: enabled - CONFIG_IP_VS_RR: enabled - CONFIG_SECURITY_SELINUX: enabled - CONFIG_SECURITY_APPARMOR: enabled - CONFIG_CHECKPOINT_RESTORE: missing #can1接收
這里是我們適配好的內核配置(提取碼:1234):https://pan.baidu.com/s/1HQdfggCQp0yMHUca4pV6qQ?pwd=1234
修改編譯時的配置文件
在編譯之前通常需要根據自己的需求選擇相應的選項,也就是在選擇編譯時要用到的配置文件。
進入 SDK根目錄
/device/rockchip/rk3566_rk3568,因為我們選擇的7,對應的是紅框處文件,要修改這個文件:

執行命令
vim rockchip_rk3568_EVB3568V1_HDMI_defconfig,將原RK_KERNEL注釋掉,重新添加一條RK_KERNEL,后面填入配置過Docker的內核配置文件名,
rockchip_linux_evb3568v1_docker_defconfig的配置項會寫入內核.config文件,這樣配置就生效了。

單獨編譯內核并燒錄
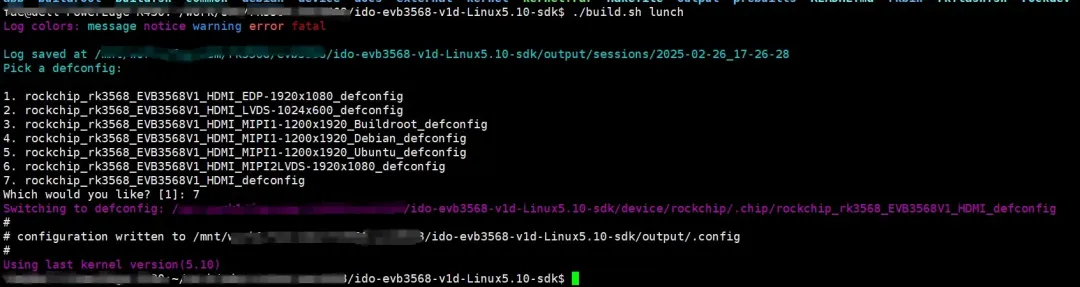
在SDK根目錄下執行./build.sh kernel如圖可以看到內核的配置文件已經替換為適配了Docker的。
注意:一定要先./build.sh lunch選擇自己修改過帶Docker的配置文件,不然使用的是不帶Docker原配置。

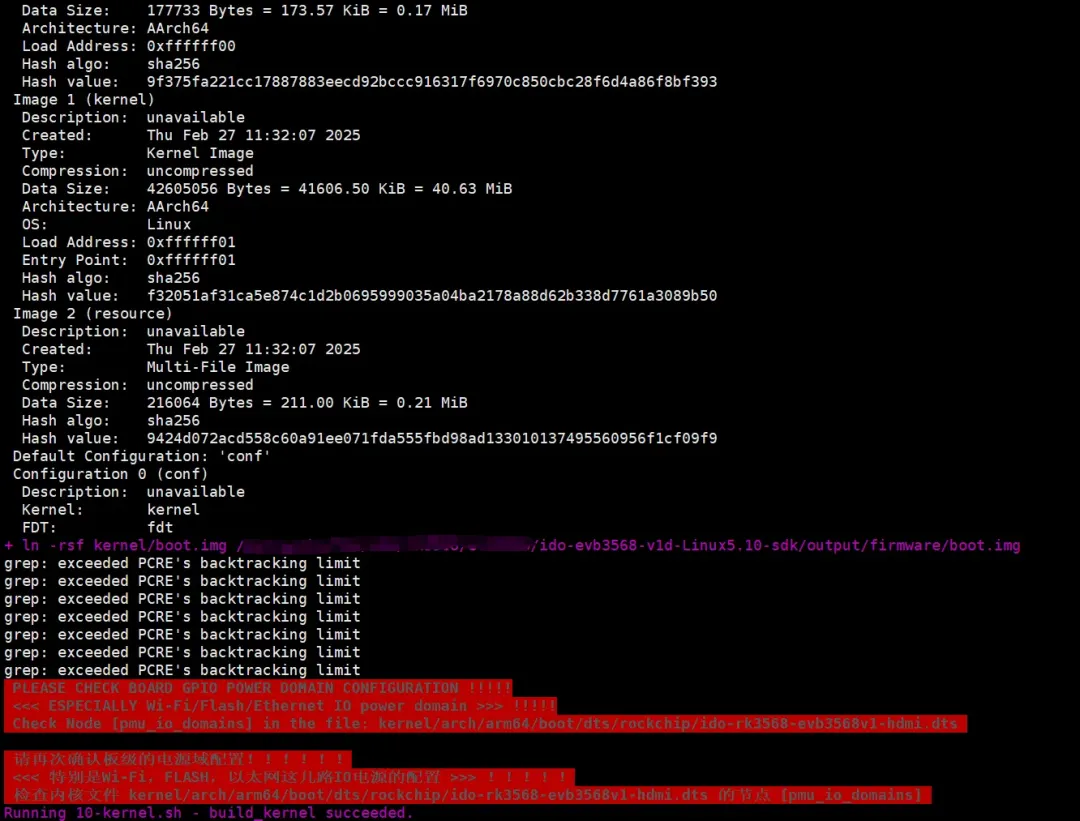
內核編譯成功(這里為了節省時間選擇單獨編譯內核):
注意:若要編譯整包固件 還需執行
export RK_ROOTFS_SYSTEM=ubuntu20,然后直接執行./build.sh即可。
具體可以到觸覺智能 官網中選擇對應產品,進入到資料下載中心,查閱相關SDK編譯、固件燒錄手冊。
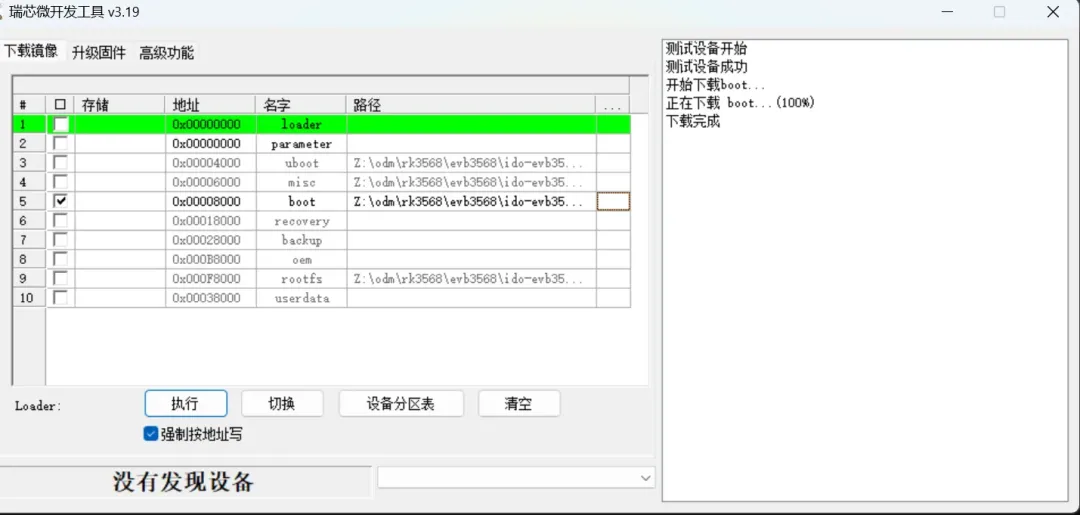
最后單獨燒入編譯好的boot.img
注意:當設備進入loader模式下,點擊“設備分區表”后更新下載地址,即可得到對應分區下載地址,隨后單獨燒入boot.img(內核鏡像)即可。
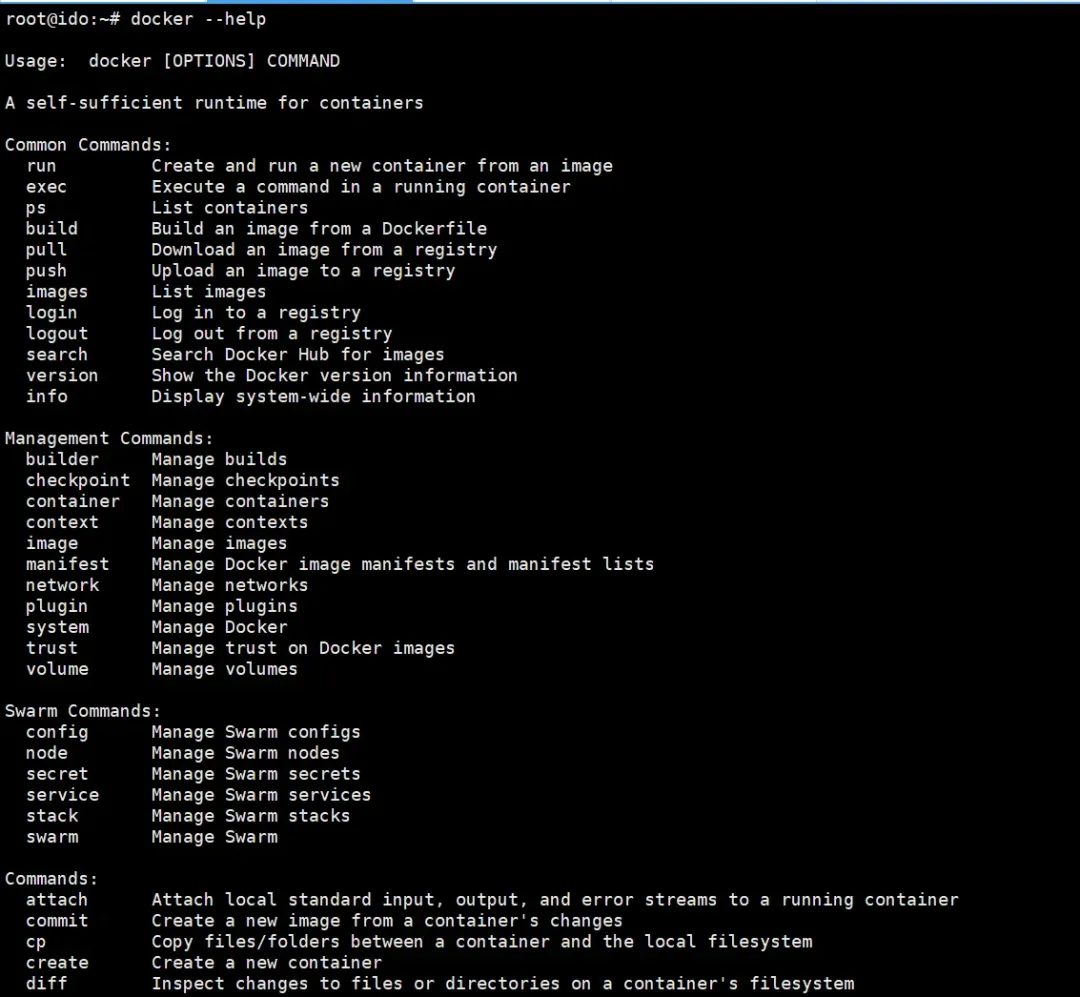
安裝Docker并驗證
輸入以下命令:
apt-get update apt-get install docker.io
安裝成功:
驗證是否成功安裝
root@ido:~# docker run hello-world 報錯:docker: Cannot connect to the Docker daemon at unix:///var/run/docker.sock. Is the docker daemon running?. See 'docker run --help'.
配置Docker的加速地址。
sudo mkdir -p /etc/docker sudo tee /etc/docker/daemon.json <<-'EOF' { "registry-mirrors": [ "https://do.nark.eu.org", "https://dc.j8.work", "https://docker.m.daocloud.io", "https://dockerproxy.com", "https://docker.mirrors.ustc.edu.cn", "https://docker.nju.edu.cn" ] } EOF sudo systemctl daemon-reload #當修改了某些服務的配置后,執行該命令使修改項立即生效 sudo systemctl restart docker systemctl status docker
詳細介紹鏈接如下:
https://blog.csdn.net/oyjl__/article/details/143522664
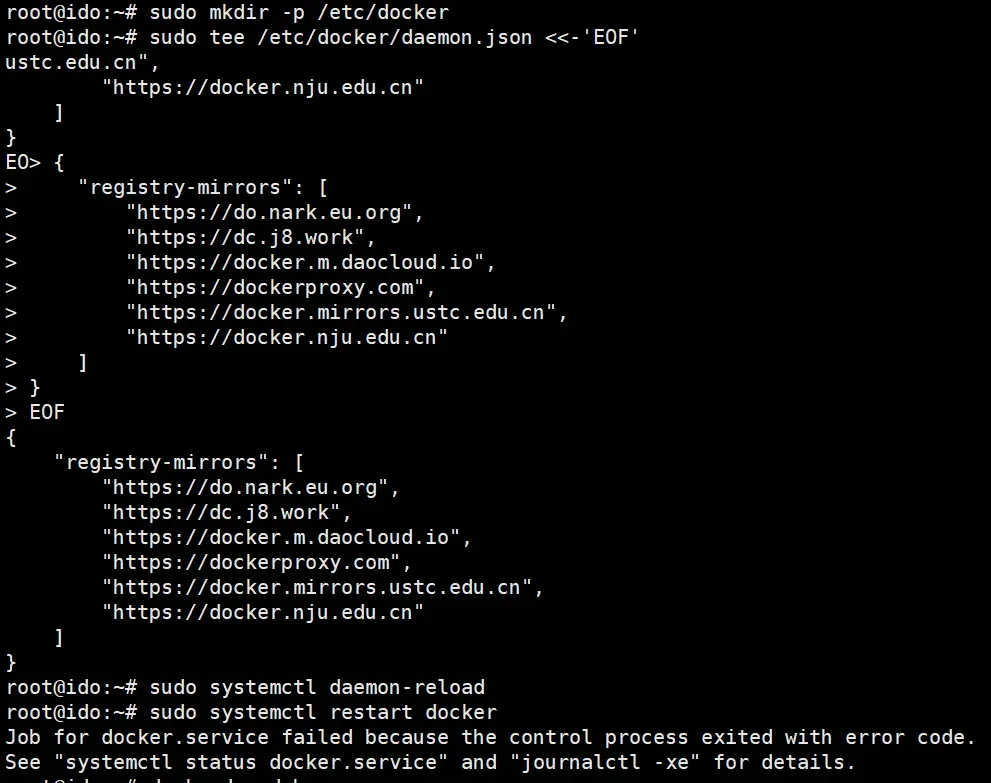
如上圖所示,sudo systemctl restart docker時會出現錯誤。
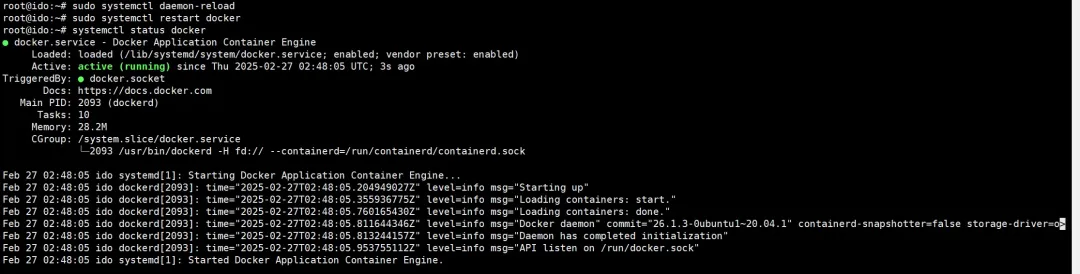
root@ido:~# dockerd --debug INFO[2025-02-27T02:47:40.691781099Z] Starting up mkdir /var/lib/docker: file exists #這里發現已經存在docker,需要刪除掉讓docker再重新生成一次 rm /var/lib/docker #再次執行如下命令 sudo systemctl daemon-reload sudo systemctl restart docker sudo systemctl status docker
如圖可以看到Docker已經處在運行狀態。
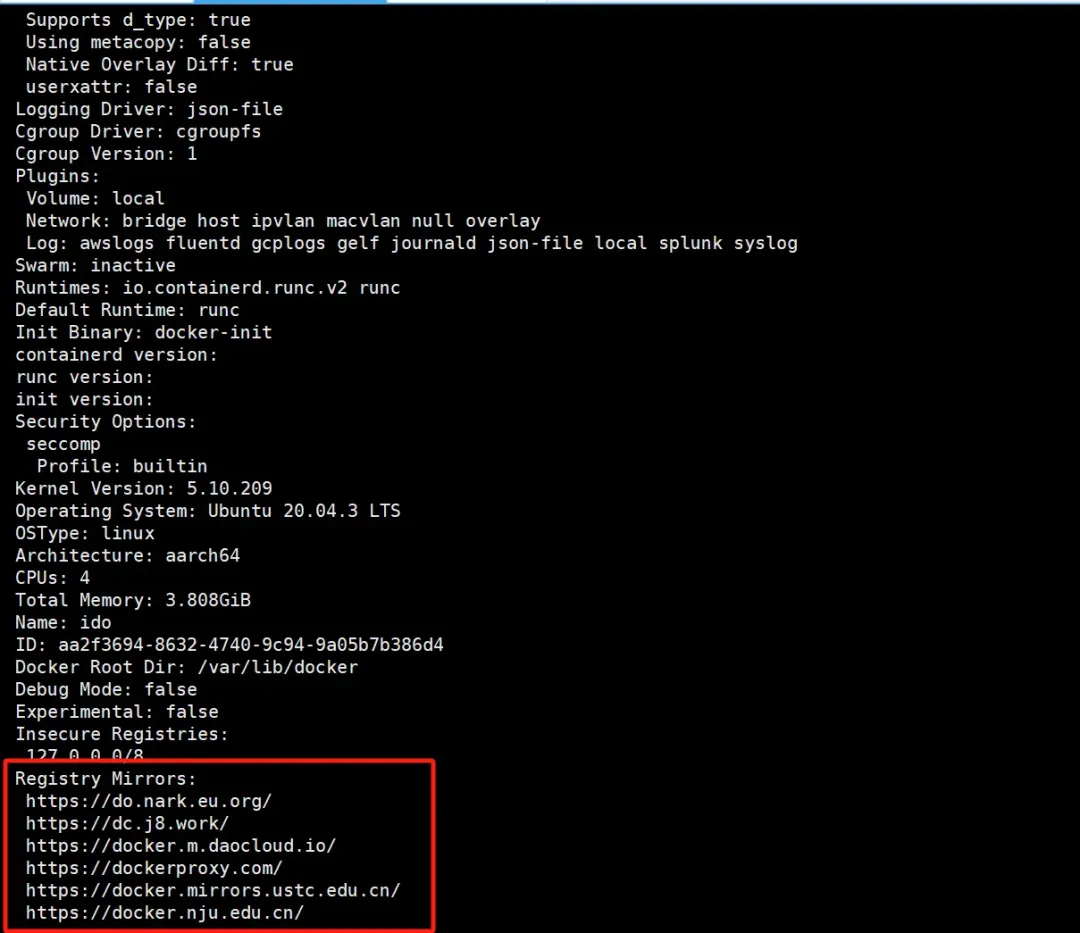
執行docker info可以看到Docker加速地址已經添加上去了。
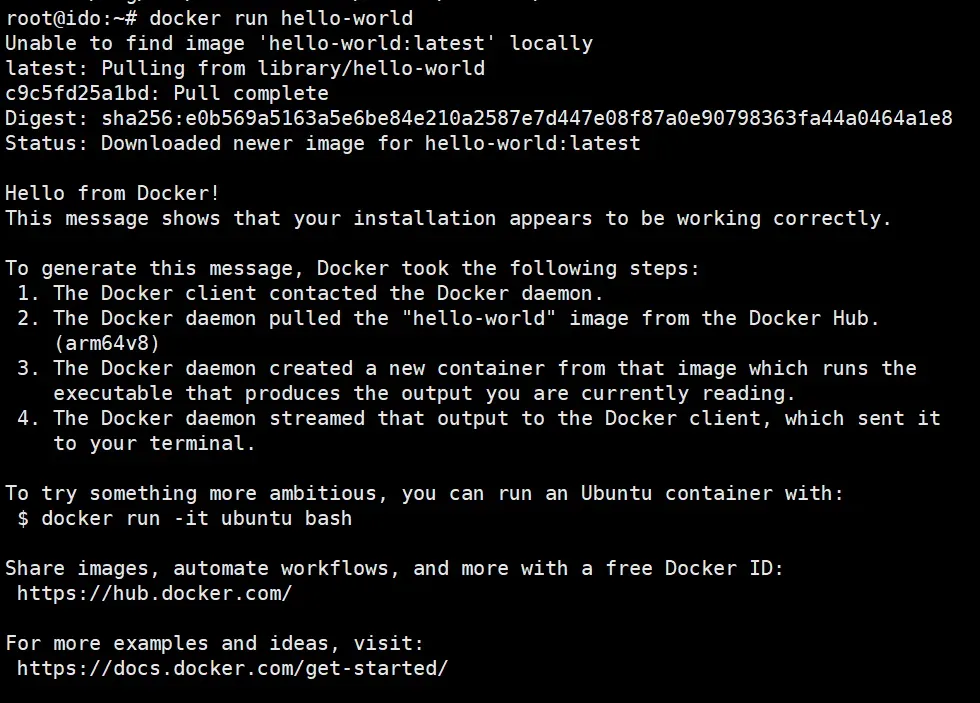
再次執行docker run hello-world可以發現Docker已經正常運行成功。
-
嵌入式開發
+關注
關注
18文章
1071瀏覽量
48569 -
Ubuntu
+關注
關注
5文章
587瀏覽量
30857 -
Docker
+關注
關注
0文章
512瀏覽量
12722 -
docker容器
+關注
關注
0文章
31瀏覽量
3466 -
RK3568
+關注
關注
5文章
582瀏覽量
6110
發布評論請先 登錄

觸覺智能RK3568_OpenHarmony開發板適配

RK356X Debian/Ubuntu系統安裝Docker技術分享
RK356X Debian/Ubuntu 系統安裝Docker


瑞芯微RK3568開發板Linux編譯報錯404怎么辦?觸覺智能教你輕松解決
如何在Linux系統實現屏幕旋轉?觸覺智能RK3568鴻蒙開發板演示

Android11修改攝像頭前后置方法,觸覺智能RK3568開發板演示
瑞芯微主板/開發板Linux系統播放音頻方法,觸覺智能RK3562開發板演示
瑞芯微平臺Android系統串口測試方法,觸覺智能RK3562開發板演示

Linux系統更換開機logo方法教程,觸覺智能RK3562開發板演示

Ubuntu20.04取消root賬號自動登錄的方法,觸覺智能RK3568開發板演示

Linux開發板CAN總線測試方法,觸覺智能RK3568開發板演示

Linux修改uboot啟動延時方法詳細攻略,觸覺智能RK3568開發板演示





 工商網監
工商網監
評論