 Linux開發板CAN總線測試方法,觸覺智能RK3568開發板演示
Linux開發板CAN總線測試方法,觸覺智能RK3568開發板演示
本文介紹Linux開發板CAN總線測試方法,使用觸覺智能EVB3568鴻蒙開發板演示,搭載瑞芯微RK3568,四核A55處理器,主頻2.0Ghz,1T算力NPU;支持OpenHarmony5.0及Linux、Android等操作系統,接口豐富,開發評估快人一步!
方法一-主板can節點對接測試
1、檢測主板是否有CAN節點
ifconfig -a
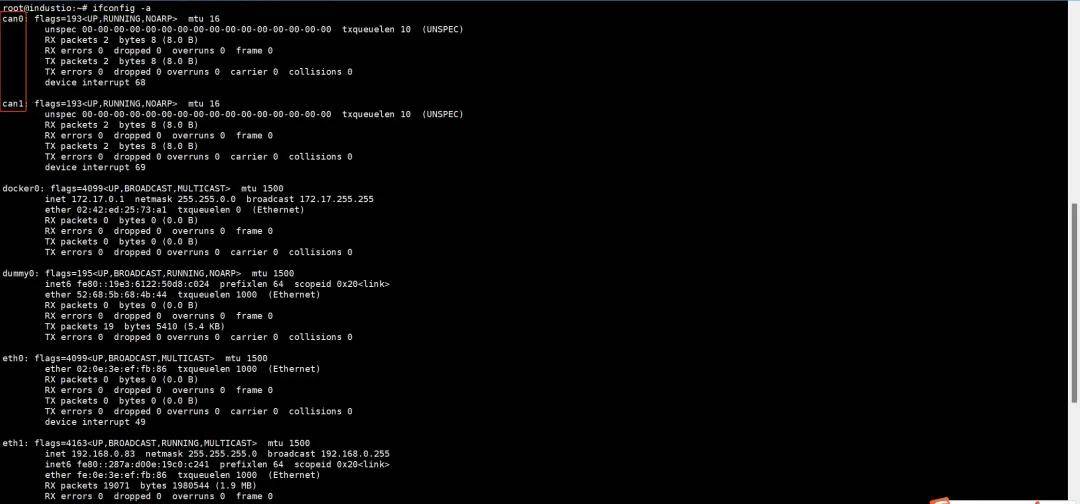
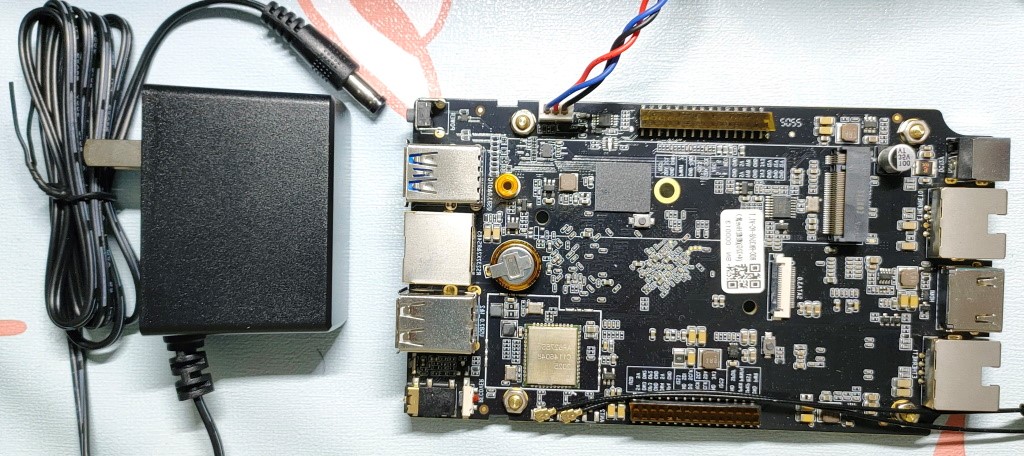
2、連接主板上的兩個CAN接口:
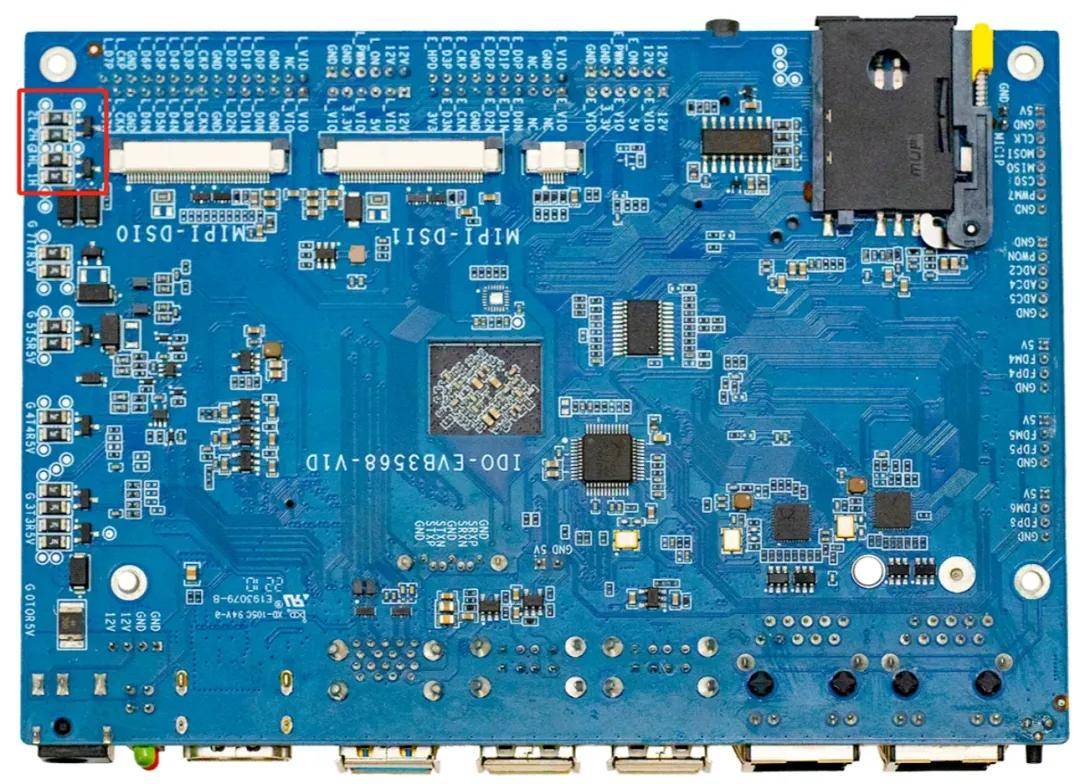
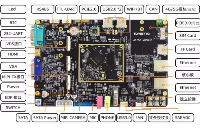
注意某些主板雖硬件參數中帶有CAN接口,但實際可能被復用成其他默認功能,具體請查看對應硬件規格書,找到CAN接口,以觸覺智能RK3568開發板EVB3568-V1為例,使用J39。
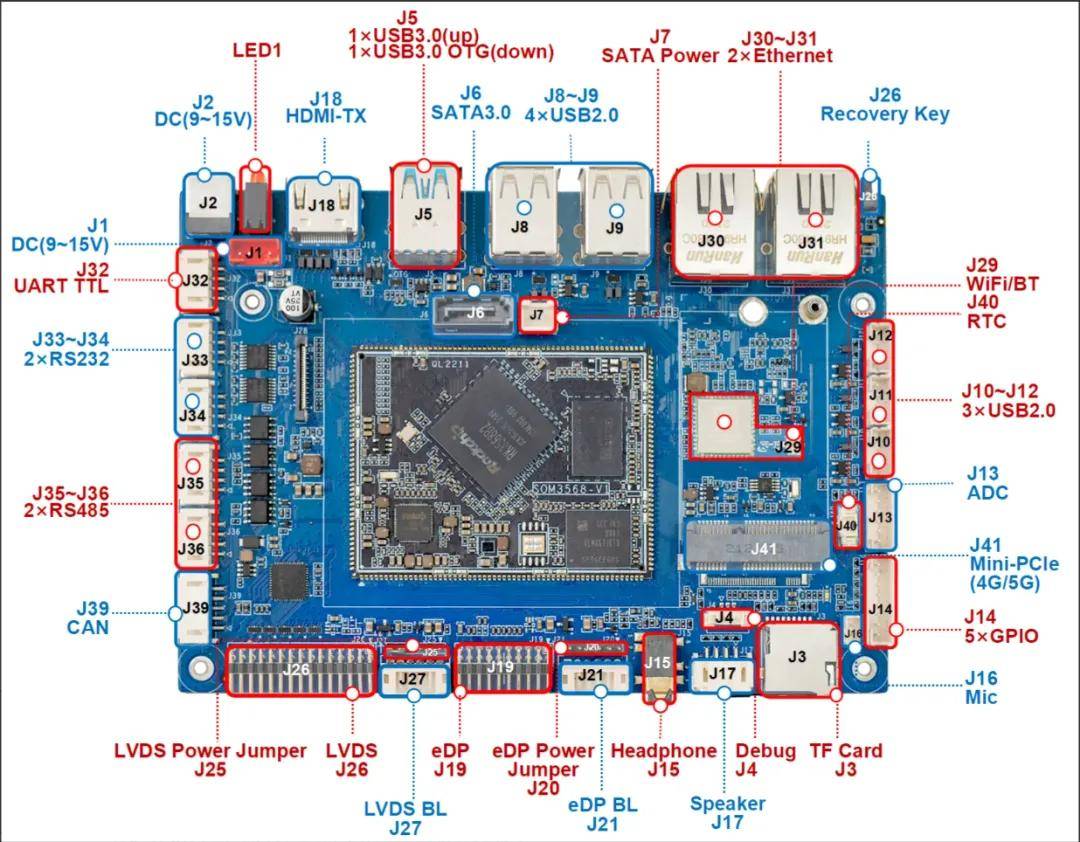
將這里的兩組CAN信號,H對H,L對L 連接好
3、配置通信基本參數,命令如下:
ip link set can0 down #需先關閉can ip link set can0 type can bitrate 250000 #設置通信速率 ip -detail link show can0 #查看設置是否生效 3: can0: mtu 16 qdisc pfifo_fast state DOWN mode DEFAULT group default qlen 10 link/can promiscuity 0 minmtu 0 maxmtu 0 can state STOPPED (berr-counter tx 0 rx 0) restart-ms 1 bitrate 250000 sample-point 0.868 #bitrate 250000生效 tq 40 prop-seg 42 phase-seg1 43 phase-seg2 13 sjw 1 rockchip_canfd: tseg1 1..128 tseg2 1..128 sjw 1..128 brp 1..256 brp-inc 2 clock 148500000 numtxqueues 1 numrxqueues 1 gso_max_size 65536 gso_max_segs 65535 root@industio:~# ip link set can0 up #啟用can0 #can1的設置如上一致,只需將can0替換為can1即可
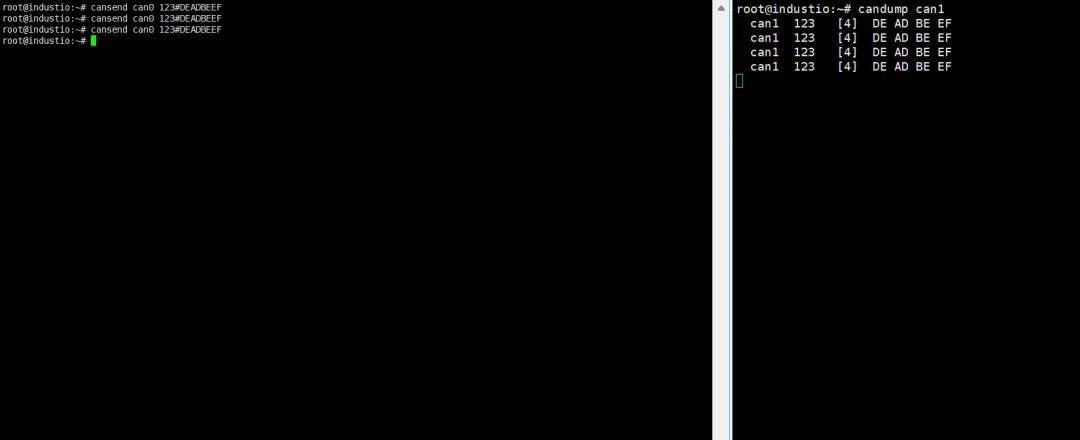
4、測試驗證,命令如下:
cansend can0 123#DEADBEEF #can0發送 candump can1 #can1接收
效果如下:
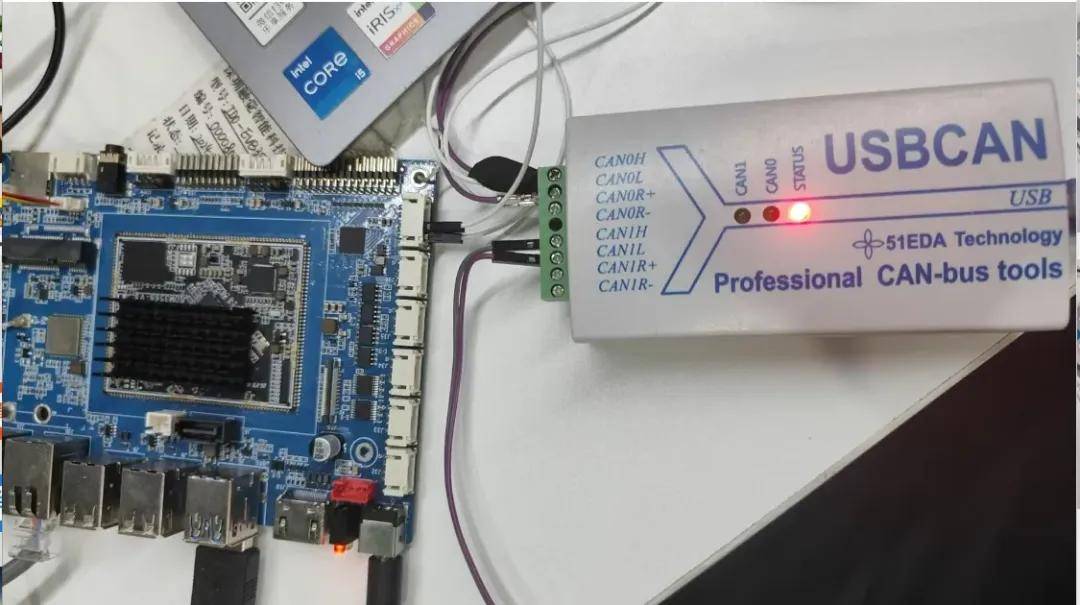
方法二-使用USB轉CAN工具與CANTest軟件進行測試。
1、將抓包工具上的CAN0接口與主板CAN0接口,H對H,L對L接好,另一端與電腦usb接口連接。
2、CANTest軟件參數設置
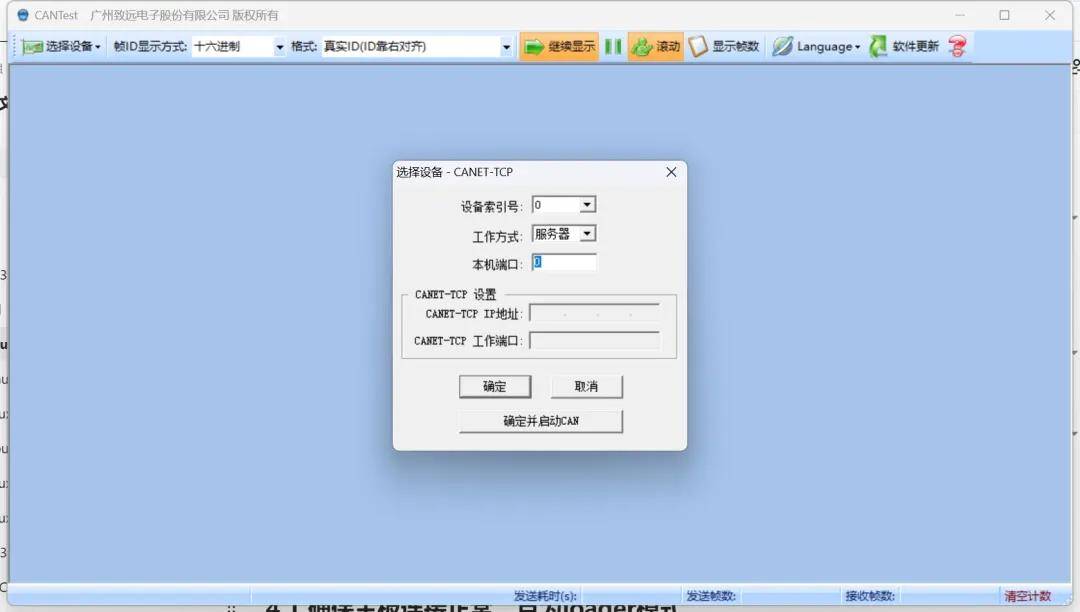
下載CANTest軟件安裝后,啟動軟件后界面如下,我們關閉彈出的界面,點擊左上角的設備選擇。
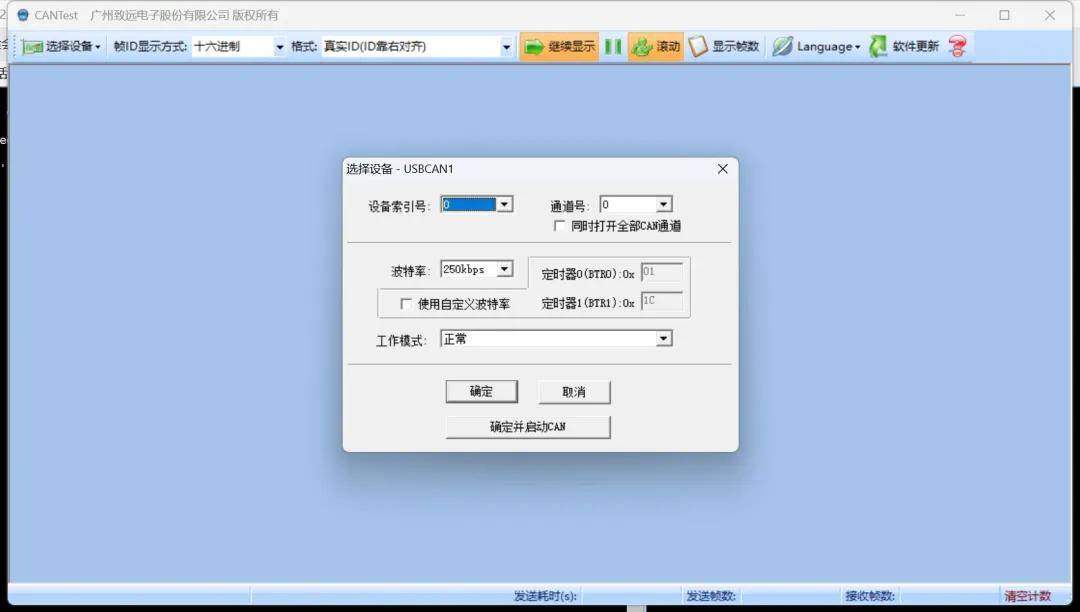
選擇USBCAN1設置,設置對應的波特率,其他參數默認即可。
注:主板CAN接口的參數設置請根據本文方法一第3段-設置通信基本參進行設置。
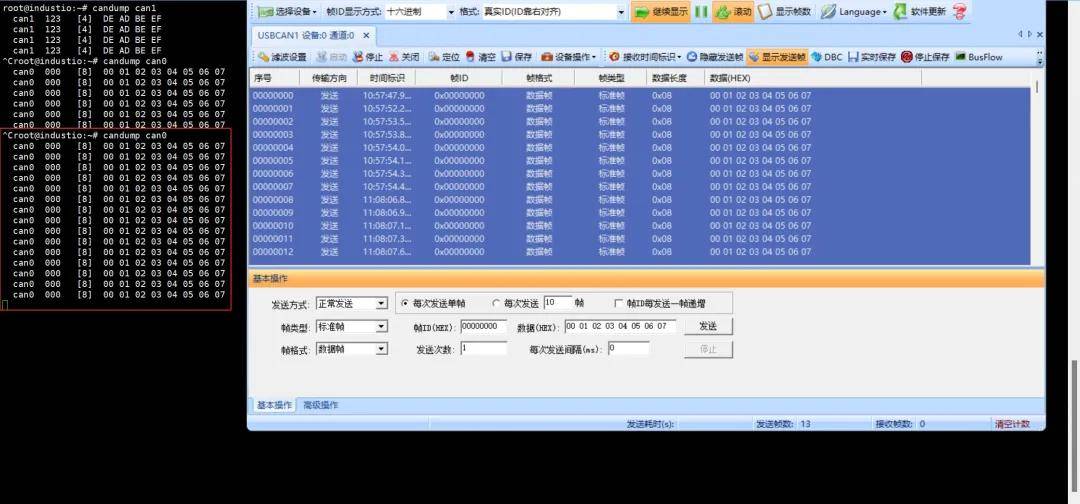
3、測試驗證
把candump can0,can0進入接收模式,CANTest工具發送數據驗證。
產品簡介
觸覺智能EVB3568鴻蒙開發板是一款基于RK3568開發的鴻蒙開發板/工控主板,適用于各種智慧顯示終端、工業自動化終端和邊緣計算網關類產品。應用可覆蓋邊緣計算、人工智能、工業HMI、工業網關、智慧醫療、自助終端、智能零售、能源電力等行業。具有以下優勢:
-
CAN
+關注
關注
57文章
2885瀏覽量
466727 -
開發板
+關注
關注
25文章
5506瀏覽量
102244 -
RK3568
+關注
關注
5文章
577瀏覽量
6080 -
觸覺智能
+關注
關注
1文章
48瀏覽量
526 -
RK3562
+關注
關注
0文章
59瀏覽量
299
發布評論請先 登錄
【ROC-RK3568-PC開發板試用體驗】Firefly ROC-RK3568-PC開發板初探



瑞芯微RK3568開發板Linux編譯報錯404怎么辦?觸覺智能教你輕松解決
如何在Linux系統實現屏幕旋轉?觸覺智能RK3568鴻蒙開發板演示

Android11修改攝像頭前后置方法,觸覺智能RK3568開發板演示
瑞芯微主板/開發板Linux系統播放音頻方法,觸覺智能RK3562開發板演示
瑞芯微平臺Android系統串口測試方法,觸覺智能RK3562開發板演示

Linux系統更換開機logo方法教程,觸覺智能RK3562開發板演示






 工商網監
工商網監
評論