") 上位機和下位機之間的通信是通過什么實現(xiàn)的
上位機和下位機之間的通信是通過什么實現(xiàn)的

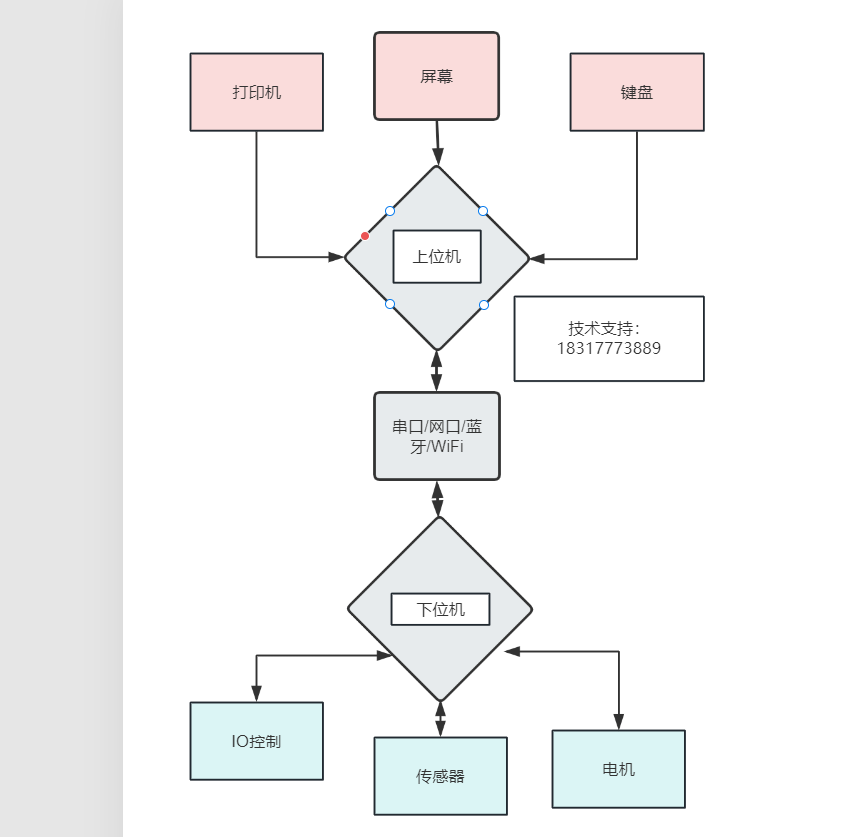
上位機和下位機之間的通信可通過多種方式實現(xiàn),以下從有線通信和無線通信兩大類別展開介紹:
有線通信
串口通信
原理:采用不平衡傳輸方式,即單端通訊。它通過發(fā)送端將邏輯電平轉(zhuǎn)換為電壓信號進行傳輸,接收端再將電壓信號還原為邏輯電平。例如,在發(fā)送端,邏輯“1”對應-3V至-15V的電壓,邏輯“0”對應+3V至+15V的電壓;接收端則根據(jù)這個電壓范圍來判斷接收到的數(shù)據(jù)是“1”還是“0”。
特點:通信距離較短,一般不超過15米;傳輸速率相對較低,常見的波特率有9600bps、19200bps等;只能實現(xiàn)點對點的通信,即一個上位機只能與一個下位機進行通信。
應用場景:常用于計算機與一些簡單的外部設備(如調(diào)制解調(diào)器、單片機開發(fā)板)之間的短距離通信。
原理:采用平衡發(fā)送和差分接收的方式。在發(fā)送端,將邏輯電平轉(zhuǎn)換為兩條信號線(A線和B線)之間的電壓差進行傳輸;在接收端,通過檢測這兩條信號線之間的電壓差來判斷接收到的數(shù)據(jù)。例如,當A線電壓高于B線電壓時,表示邏輯“1”;當A線電壓低于B線電壓時,表示邏輯“0”。
特點:通信距離較遠,在較低波特率下可達1200米;傳輸速率較高,最高可達10Mbps;支持多點通信,一個上位機可以同時與多個下位機進行通信,通過不同的地址來區(qū)分各個下位機。
應用場景:廣泛應用于工業(yè)自動化領域,如工廠的生產(chǎn)線監(jiān)控系統(tǒng)、樓宇自動化系統(tǒng)等,用于連接上位機與多個PLC、智能儀表等下位機設備。
原理:基于TCP/IP協(xié)議族進行數(shù)據(jù)傳輸。上位機和下位機都具備以太網(wǎng)接口,通過網(wǎng)線連接到局域網(wǎng)或廣域網(wǎng)中。數(shù)據(jù)在傳輸過程中被封裝成一個個的數(shù)據(jù)包,每個數(shù)據(jù)包包含源IP地址、目的IP地址、源端口號、目的端口號等信息,以便在網(wǎng)絡中正確地路由和傳輸。
特點:傳輸速度快,帶寬大,常見的傳輸速率有10Mbps、100Mbps、1000Mbps甚至更高;易于與互聯(lián)網(wǎng)連接,實現(xiàn)遠程監(jiān)控和管理;支持多種通信協(xié)議,如Modbus TCP、OPC UA等,方便不同設備之間的互聯(lián)互通。
應用場景:適用于對數(shù)據(jù)傳輸速度和實時性要求較高的工業(yè)控制系統(tǒng),如智能電網(wǎng)、智能交通系統(tǒng)等。
無線通信
Wi-Fi通信
原理:基于IEEE 802.11系列標準,通過無線接入點(AP)將上位機和下位機連接到無線網(wǎng)絡中。數(shù)據(jù)在無線信道中以電磁波的形式進行傳輸,采用載波監(jiān)聽多路訪問/沖突避免(CSMA/CA)機制來避免多個設備同時發(fā)送數(shù)據(jù)導致的沖突。
特點:傳輸速率較高,可滿足大多數(shù)工業(yè)控制數(shù)據(jù)傳輸?shù)男枨螅煌ㄐ啪嚯x相對較遠,在有良好信號覆蓋的情況下,可達幾十米甚至上百米;設備接入方便,無需布線,靈活性高。
應用場景:常用于一些移動設備的監(jiān)控和控制,如倉庫中的AGV(自動導引車)與上位機之間的通信,以及一些對布線不便的場合,如老舊工廠的自動化改造。
藍牙通信
原理:采用跳頻擴頻(FHSS)技術(shù),在2.4GHz的ISM頻段上快速跳變頻率進行數(shù)據(jù)傳輸。它通過建立主從設備之間的連接,實現(xiàn)數(shù)據(jù)的雙向傳輸。主設備(如上位機)負責發(fā)起連接和控制通信過程,從設備(如下位機)響應主設備的指令。
特點:功耗低,適合電池供電的下位機設備;通信距離較短,一般在10米以內(nèi);設備體積小,成本低,易于集成到各種小型設備中。
應用場景:適用于一些近距離、低功耗的工業(yè)控制場景,如可穿戴設備與上位機之間的數(shù)據(jù)傳輸,以及一些簡單的傳感器數(shù)據(jù)采集系統(tǒng)。
ZigBee通信
原理:基于IEEE 802.15.4標準,采用自組網(wǎng)的方式構(gòu)建無線傳感器網(wǎng)絡。它具有低功耗、低速率、短距離的特點,通過星型、樹型或網(wǎng)狀網(wǎng)絡拓撲結(jié)構(gòu)實現(xiàn)設備之間的通信。在網(wǎng)絡中,有一個協(xié)調(diào)器節(jié)點負責網(wǎng)絡的組建和管理,路由器節(jié)點負責數(shù)據(jù)的轉(zhuǎn)發(fā),終端設備節(jié)點負責數(shù)據(jù)的采集和發(fā)送。
特點:網(wǎng)絡容量大,一個ZigBee網(wǎng)絡最多可支持65535個設備節(jié)點;功耗極低,電池供電的設備可工作數(shù)月甚至數(shù)年;可靠性高,采用碰撞避免機制和自動重傳機制來保證數(shù)據(jù)的可靠傳輸。
應用場景:廣泛應用于工業(yè)自動化中的環(huán)境監(jiān)測、設備狀態(tài)監(jiān)測等領域,如對工廠內(nèi)的溫度、濕度、壓力等環(huán)境參數(shù)進行實時監(jiān)測,并將數(shù)據(jù)傳輸?shù)缴衔粰C。
審核編輯 黃宇
-
數(shù)據(jù)采集
+關注
關注
40文章
7191瀏覽量
116545 -
上位機
+關注
關注
27文章
967瀏覽量
55812
發(fā)布評論請先 登錄
構(gòu)建穩(wěn)定通信橋梁:上位機與下位機通信實現(xiàn)方式解析
工程師崩潰瞬間:上位機與PLC通信失敗?3分鐘快速診斷攻略
上位機和下位機是什么關系
如何通過上位機控制CYUSB3014的指定管腳實現(xiàn)類似功能?
labview做上位機 連接兩臺TCP下位機 調(diào)用通道使兩臺下位機數(shù)據(jù)交互 無法生成exe
下位機是如何配置VL53L4CD?
都說上位機通信難,誰能說說到底難在哪兒?

使用stm32u535實現(xiàn)usb hid custom上下位機通信功能時遇到了從上位機(計算機)接收數(shù)據(jù)有個別錯誤的問題,怎么解決?
ADS1299EEGFE如果想采集實時的話,需要修改上位機還是下位機程序呢?
上位機實時數(shù)據(jù)處理技術(shù) 上位機在智能制造中的應用
上位機系統(tǒng)架構(gòu)分析 上位機與下位機的區(qū)別
PLC與上位機無法通信如何解決(IP沖突如何解決)

陀螺儀LSM6DSOW開發(fā)(2)----上報匿名上位機實現(xiàn)可視化






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論