 基于睿擎派輕松玩轉CANopen電機控制
基于睿擎派輕松玩轉CANopen電機控制

在工業自動化領域,穩定高效的設備間通信是核心。CANopen協議憑借其可靠性,成為眾多工業設備(如伺服電機)的首選通信標準。今天,我們就來展示如何利用RT-Thread睿擎工業開發平臺,快速構建一個CANopen主機系統,實現對電機的啟停控制!無需復雜底層開發,睿擎平臺助你輕松邁入工業通信大門。
一、場景聚焦:讓電機聽你指揮
你手頭有一臺支持CANopen協議的工業電機(例如我們演示中使用的TLC42C-24V-04兩相42閉環一體機),如何讓你的開發板成為它的“指揮官”,精準地發送啟動、停止指令?這正是睿擎平臺擅長的領域!
二、利器在手:RT-Thread睿擎工業開發平臺
睿擎平臺不僅提供了強大的實時操作系統內核,更深度集成了豐富的工業總線協議棧(包括CANopen!)。這意味著開發者可以:
1.告別底層協議棧的繁瑣移植與調試:CANopen協議棧已深度集成,開箱即用。
2.聚焦應用邏輯:將精力放在如何控制設備、實現業務邏輯上,而非通信細節。
3.享受RT-Thread生態優勢:豐富的組件、易用的開發環境(RuiChing Studio IDE)、活躍的社區支持。
三、實戰演練:啟停控制,So Easy!
我們以控制電機啟停為例,展示睿擎平臺實現CANopen通信的便捷性。以下是核心步驟概覽:
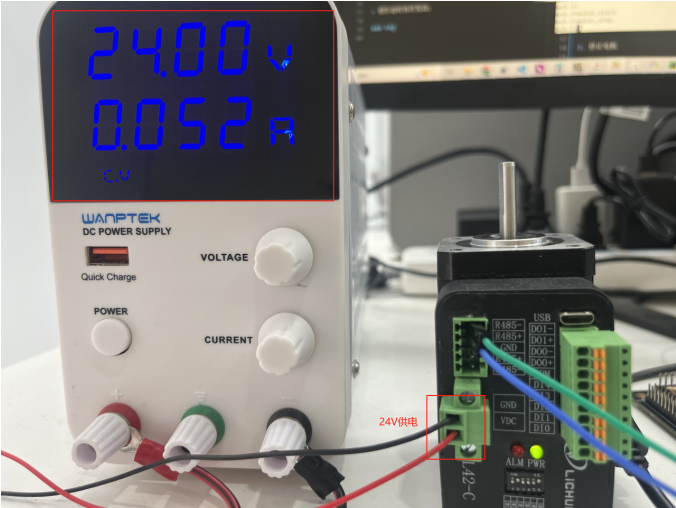
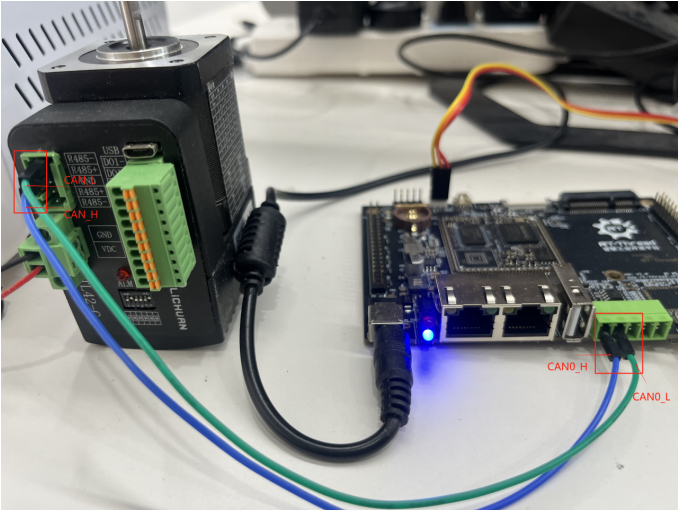
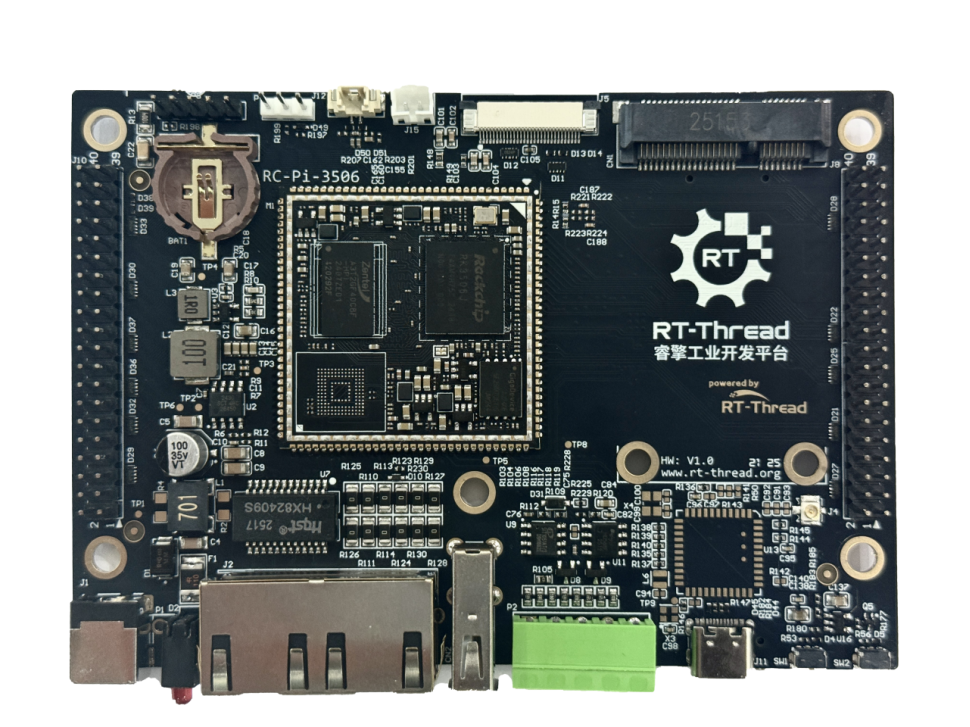
1.硬件準備:睿擎派開發板(作為CANopen主機)。
a.TLC42C-24V-04電機(作為CANopen從機,站號設置為2)。
b.關鍵配置:電機波特率設置為1Mbps。站號開關配置如下(確保匹配):
SW1: OFF
i.SW2: ON
ii.SW3: OFF
iii.SW4: OFF
iv.SW5: OFF
v.SW6: ON
c.硬件連接:使用CAN線纜將開發板的CAN接口與電機的CAN接口可靠連接。同時,確保為電機接入正確的電源。
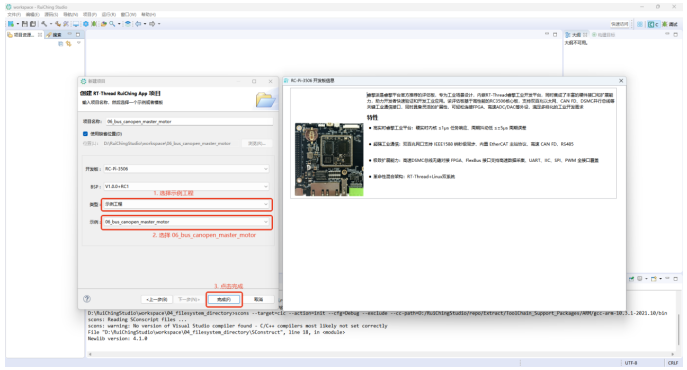
2.工程創建:打開RuiChing Studio IDE。
a.選擇內置的 **06_bus_canopen_master_motor** 示例工程。這個工程已經包含了CANopen主機控制電機的基礎框架。
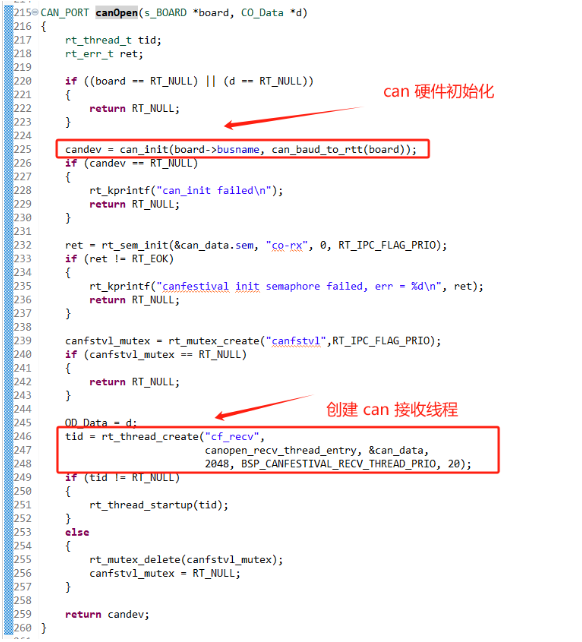
3.核心代碼解析: 協議棧初始化(master402_canopen.c): 簡潔的代碼即可完成CANopen協議棧的啟動和配置。
a.硬件驅動與接收線程(canopen_rtthread.c): RT-Thread的CAN驅動抽象層和線程機制,讓底層通信處理變得清晰高效。
b.PDO配置與映射: 示例中演示了如何在“預操作狀態”下,使用SDO指令配置PDO通信參數和映射表,為高效的過程數據交換做好準備。
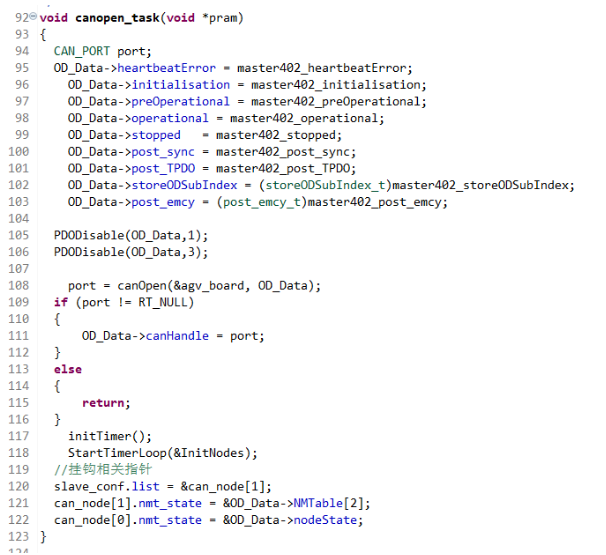
c.狀態切換: 配置節點保護超時時間,并通過發送NMT指令,將從機狀態從“預操作”切換到“操作”狀態,準備接收控制命令。
4.編譯與運行:在IDE中一鍵編譯示例工程,確認成功。
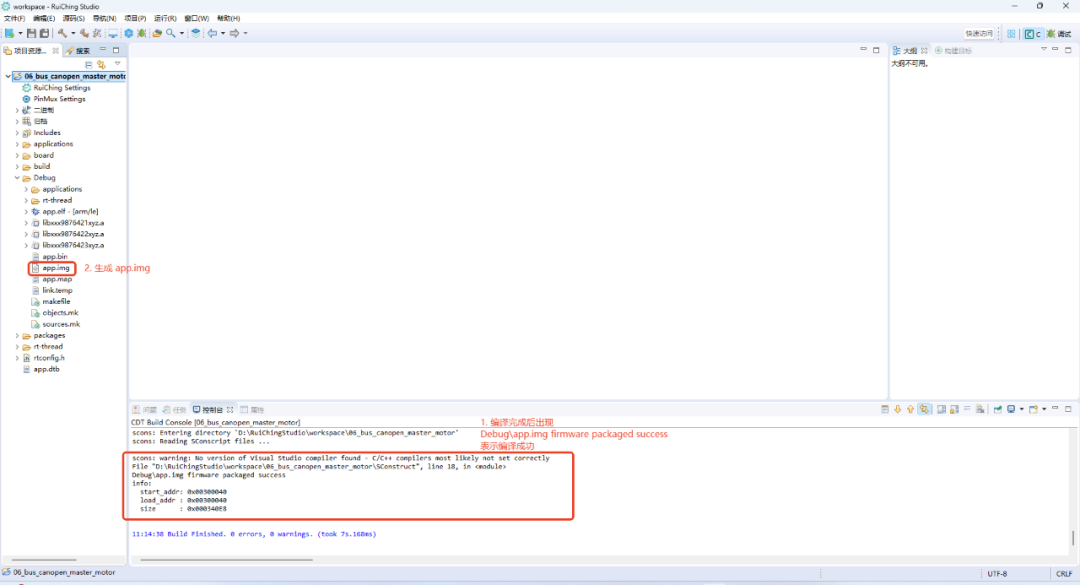
a.連接開發板,調試運行程序。
b.在終端(如MSH命令行)中體驗控制:輸入 **canopen_start** :初始化CANopen協議棧,建立通信。
i.輸入 **motor_start:發送指令,啟動電機!**
ii.輸入 **motor stop:發送指令,停止電機!**
四、為何選擇睿擎平臺?
開箱即用的工業協議棧: CANopen等主流工業協議深度集成,大幅縮短開發周期。
穩定可靠的實時內核: 確保工業控制任務的實時性和確定性。
完善的開發工具鏈: RuiChing Studio IDE提供從編碼、編譯、調試到部署的一站式體驗。
活躍的社區與豐富資源: 遇到問題?海量教程、文檔和社區開發者為你提供支持。
結語
從硬件連接到指令控制,睿擎平臺讓實現CANopen通信變得簡單。06_bus_canopen_master_motor示例只是一個起點,基于此,你可以輕松擴展功能,實現更復雜的運動控制、狀態監控等工業應用。
-
電機控制
+關注
關注
3573文章
1970瀏覽量
272071 -
CAN
+關注
關注
57文章
2921瀏覽量
467881 -
工業自動化
+關注
關注
17文章
2744瀏覽量
68358
發布評論請先 登錄
10分鐘上手睿擎平臺GUI開發:第一個LVGL圖形應用

動手玩轉Arduino---運動控制(直流電機步進電機舵機)

中新社:RT-Thread攜“睿擎平臺”亮相工博會 | 媒體視角

睿擎平臺極簡開發重要實踐—— PinMux 配置工具 | 睿擎派試用名單公示
睿擎派RK3506J開發板開箱記錄、初步調試
重新定義MPU性價比!睿擎派7月4日淘寶首發,199 元起解鎖全棧開發力
【MCU體驗、MPU性能】睿擎派 RC3506 套件今日10點淘寶獨家開售!首批200套,搶完即止!| 產品動態






 工商網監
工商網監
評論