") 使用瑞薩電子RZ/T2H產(chǎn)品實現(xiàn)多關(guān)節(jié)機器人
使用瑞薩電子RZ/T2H產(chǎn)品實現(xiàn)多關(guān)節(jié)機器人

人形機器人是目前最受市場關(guān)注的科技發(fā)展方向之一。人形機器人集機械、電氣控制、通信、AI于一體,是典型的多領(lǐng)域綜合技術(shù)。
人形機器人各個關(guān)節(jié)的活動,本質(zhì)上還是控制電機轉(zhuǎn)動,由電能轉(zhuǎn)化為可控的機械能。多自由度意味著多電機控制。瑞薩電子的RZ T2H產(chǎn)品,可以實現(xiàn)用一顆芯片,實現(xiàn)9個自由度的運動控制。
RZ T2H可以應(yīng)用于關(guān)節(jié)式機器人、協(xié)作機器人、生產(chǎn)線上的AGV/AMR、PLC、CNC數(shù)控機床、柔性機器人等場景。
其性能如下:
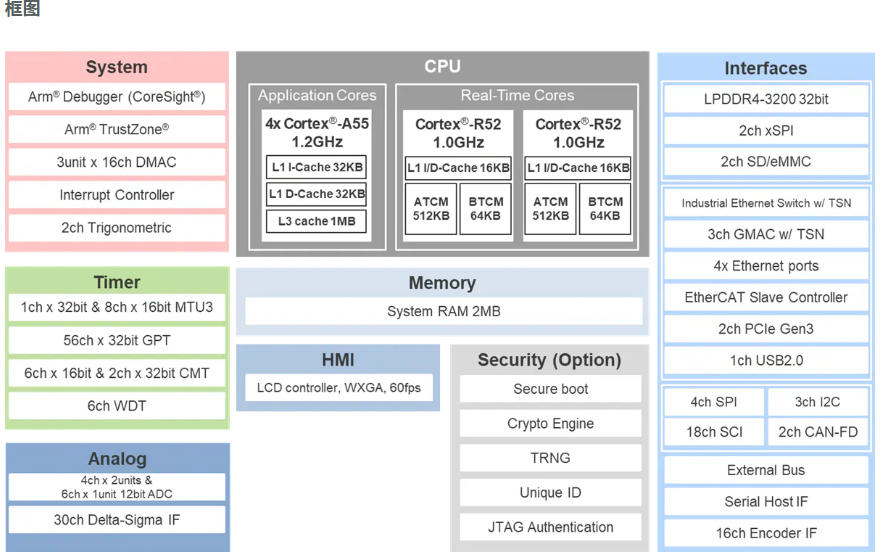
四個Arm Cortex-A55核,最高頻率1.2GHz
每個CPU有32KB L1的I-Cache和D-Cache
共享1MB L3 Cache
1.6V至5.5V的寬工作電壓范圍消除了在5V系統(tǒng)中使用電平轉(zhuǎn)換器/穩(wěn)壓器的需求
兩個Arm Cortex-R52核,最高頻率1GHz
每個CPU有16KB的L1 Cache
每個CPU有512KB ATCM和64KB BTCM
內(nèi)置高精度(±1.0%)高速片上振蕩器
1.6V至5.5V的寬工作電壓范圍消除了在5V系統(tǒng)中使用電平轉(zhuǎn)換器/穩(wěn)壓器的需求
對于外設(shè):
內(nèi)置高精度(±1.0%)高速片上振蕩器
1.6V至5.5V的寬工作電壓范圍消除了在5V系統(tǒng)中使用電平轉(zhuǎn)換器/穩(wěn)壓器的需求
支持EtherCAT,Profinet RT/IRT, Ethernet I/P,CC link IE Basic,TSN, OPC UA over TSN等工業(yè)通信協(xié)議
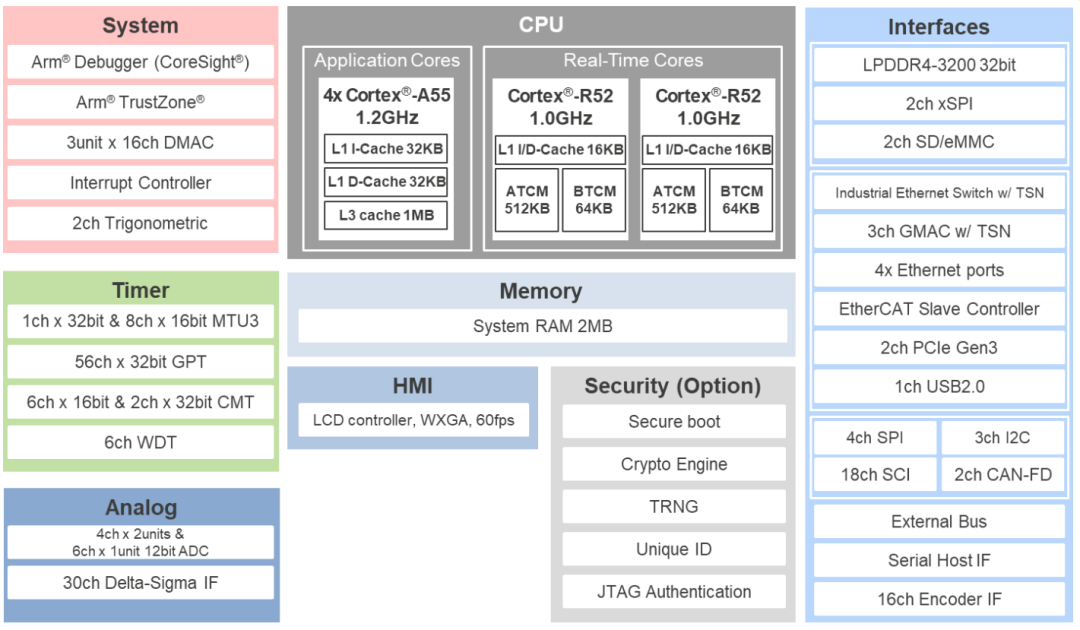
圖1 RZ T2H框圖
瑞薩電子提供了一套9軸demo,其硬件框架如下:
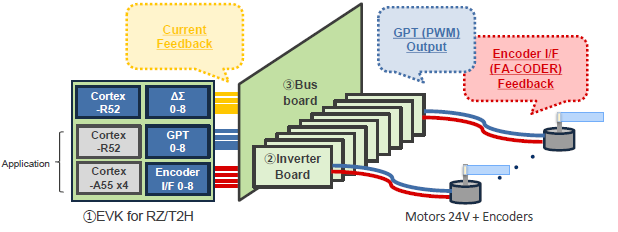
圖2 RZ T2H 9軸展示硬件框圖
硬件包括:
1塊RZ T2H EVK板,9塊逆變板分別驅(qū)動9個電機,1塊BUS母板用于接插逆變板。
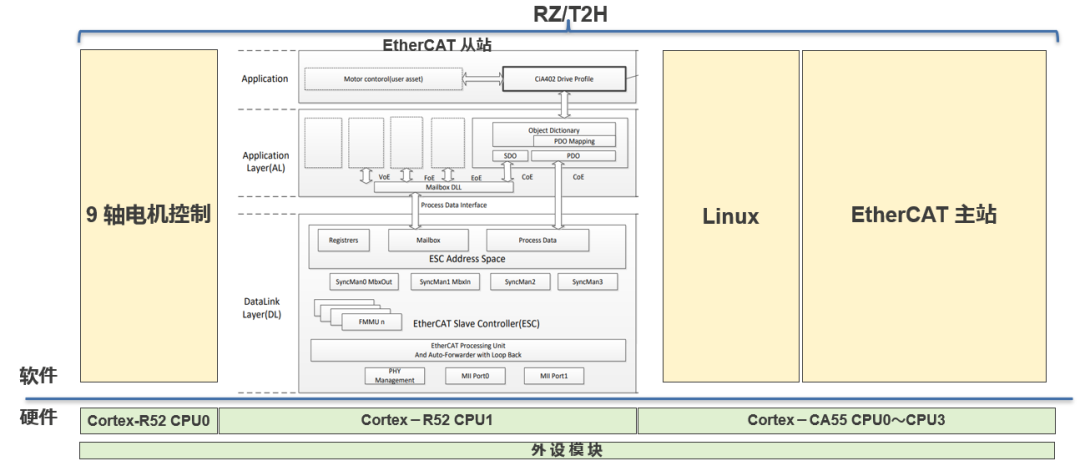
圖3 RZ T2H 9軸展示軟件框圖
9軸展示的軟件框架為:
由R52_0核來控制9路電機,R52_1作為EtherCAT從站,從主站接收控制指令,并傳輸現(xiàn)場運行數(shù)據(jù)到主站,4個A55核運行Linux系統(tǒng),和EtherCAT主站應(yīng)用內(nèi)軟件。由于T2H強大的多核異構(gòu)和外設(shè)能力,可以實現(xiàn)R核處理實時控制,而讓A核做復(fù)雜的主站控制,這種驅(qū)控一體的應(yīng)用設(shè)計。
具體實施:
下圖是硬件接線實物圖。
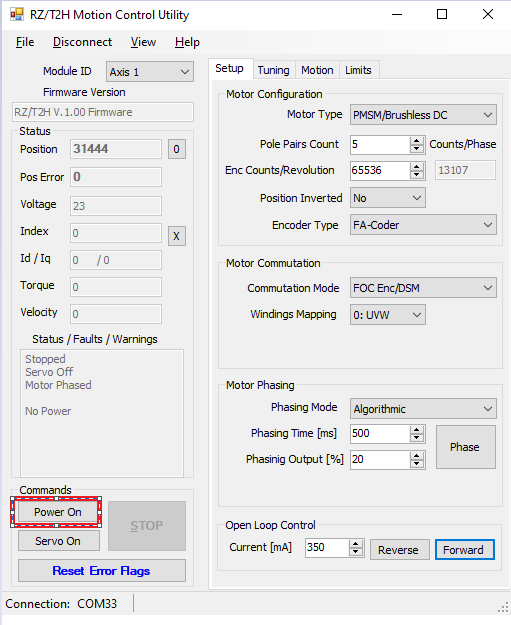
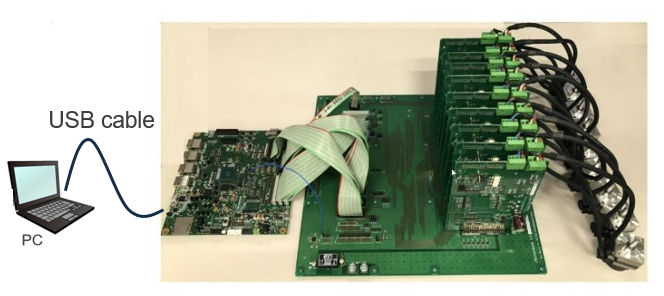
圖4 RZ T2H 9軸實物圖
右側(cè)電機型號是多摩川TSM3101 N2001 E020,24V交流伺服電機。
左側(cè)是運行在PC端的RZ/T2H Motion Control Utility,可以對9路電機分別采用電流環(huán)、位置環(huán)控制,也可以同時控制9路電機旋轉(zhuǎn)。
A55與R52_1之間的EtherCAT通信,如下圖的示意。同時,還可以通過T2H的網(wǎng)口連接更多的EtherCAT Slave設(shè)備,組成子網(wǎng)。

圖5 EtherCAT通信拓?fù)浣Y(jié)構(gòu)
R52_0與R52_1核間通信采用OpenAMP或者RZ T2H自帶的Mailbox and Semaphore機制。當(dāng)然,OpenAMP也是基于RZ T2H Mailbox and Semaphore實現(xiàn),該功能實現(xiàn)多核之間通信。
對于核間通信,數(shù)據(jù)Copy性能如下:

注:
測量1:發(fā)送端從0x101e0000拷貝16KB數(shù)據(jù)到共享地址 0x101a1000,non-cache操作。
測量2:接收端從共享地址0x101a1000拷貝16KB數(shù)據(jù)到0x101c0000,non-cache操作。
核間中斷是2us。
同時,如下圖所示,瑞薩提供了A55工作于Linux,一個R52核工作于FreeRTOS,另一個R52核工作于Baremetal下的數(shù)據(jù)共享例程。
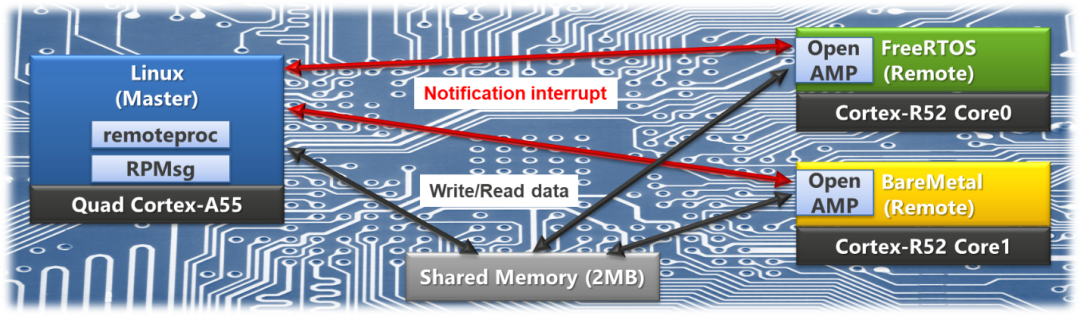
圖6 豐富多樣的參考例程
Q
為什么一個R52核就可以控制9路電機?
A:得益于LLPP(Low-Latency Peripheral Port)總線和強大的外設(shè)。如下圖所示,兩個R52核可同時訪問LLPP,且這兩個核的TCM容量較大,讓執(zhí)行程序在TCM中運行,運算和控制速度更快。
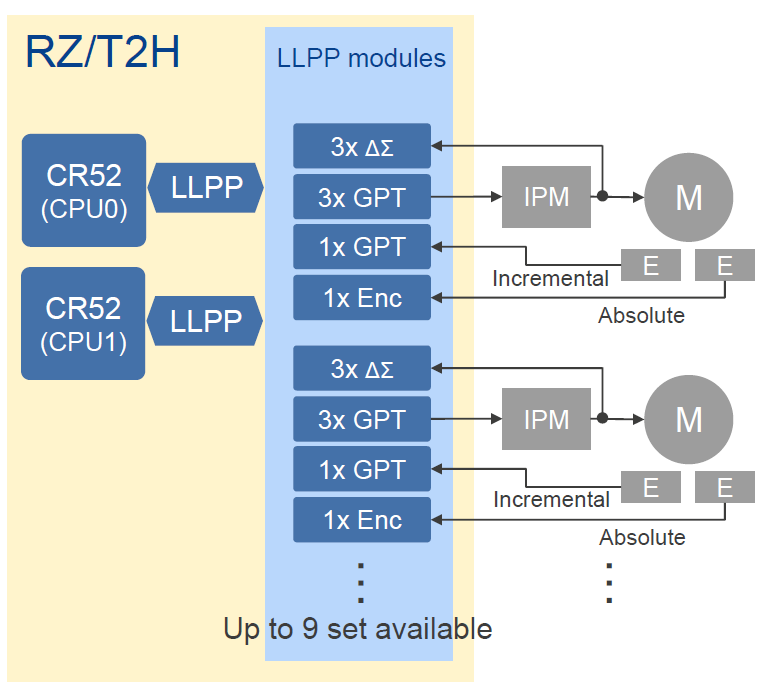
圖7 RZ T2H LLPP架構(gòu)
T2H系列的ELC(Event Link Contrller)功能,讓同步邏輯變得更加簡單,代碼中無需通過中斷回調(diào)的方式去觸發(fā),只用ELC硬件同步即可,代碼變得更加簡單高效。
在9軸展示例程中,硬件上,CR52 CPU0通過LLPP總線訪問9個GPT單元,進(jìn)而輸出用于驅(qū)動電機的PWM信號。9路SCIE接口采集9路增量編碼器信號,獲取電機位置信息,9路DSMIF接口采集電機的U/V/W 3相電流信號。
代碼內(nèi)部邏輯包含了PID控制算法、電流環(huán)控制算法、加速度、速度、位置計算、對控制臺命令協(xié)議的解析(如果不用控制臺,可以直接在代碼中固定相關(guān)參數(shù))。對于電機控制用到的三角函數(shù)計算,RZ T2H有TFU單元(Trigonometric Function Unit),加速數(shù)學(xué)計算。
-
機器人
+關(guān)注
關(guān)注
213文章
29726瀏覽量
212790 -
瑞薩
+關(guān)注
關(guān)注
36文章
22381瀏覽量
88024 -
AI
+關(guān)注
關(guān)注
88文章
35093瀏覽量
279471 -
運動控制
+關(guān)注
關(guān)注
4文章
718瀏覽量
33547 -
人形機器人
+關(guān)注
關(guān)注
7文章
736瀏覽量
17618
原文標(biāo)題:RZ T2H的9軸驅(qū)動助力多關(guān)節(jié)機器人
文章出處:【微信號:瑞薩MCU小百科,微信公眾號:瑞薩MCU小百科】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
瑞薩RZ T2H更換DDR流程和工具介紹
《電子發(fā)燒友電子設(shè)計周報》聚焦硬科技領(lǐng)域核心價值 第11期:2025.05.12--2025.05.16
常見的多關(guān)節(jié)機器人有哪些?具有什么特點?

瑞薩電子推出功能強大的單芯片RZ/V2H MPU
瑞薩RZ/T2H新產(chǎn)品量產(chǎn)上市

工業(yè)MPU新標(biāo)桿,多協(xié)議工業(yè)以太網(wǎng)+運動控制 - 瑞薩RZ/T2H 新產(chǎn)品

瑞薩電子量產(chǎn)高性能工業(yè)設(shè)備MPU RZ/T2H
如何使用瑞薩RZ/T2H單芯片提升工業(yè)機器人性能
瑞薩電子RZ MPU家族精品RZ/N2L產(chǎn)品介紹
瑞薩交流日進(jìn)行中,米爾演講-RZ/T2H高性能模組賦能工業(yè)產(chǎn)品創(chuàng)新

RZ/T2H MPU數(shù)據(jù)手冊和產(chǎn)品介紹#集成了強大的應(yīng)用處理能力和精確的實時控制功能
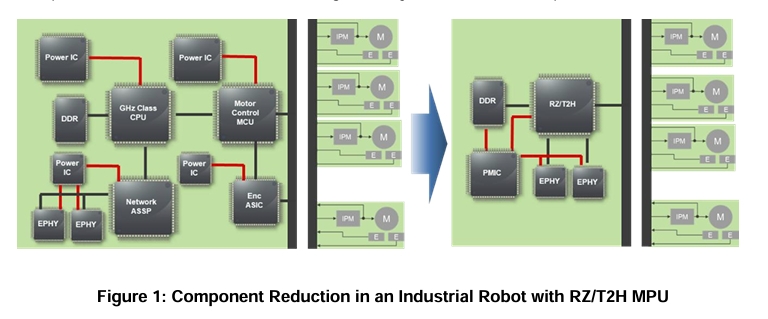
使用RZ/T2H MPU提高工業(yè)機器人性能并顯著減少組件數(shù)量和開發(fā)工時的方法





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論