 PID調節比例、積分、微分之間的聯系與相匹配使用效果
PID調節比例、積分、微分之間的聯系與相匹配使用效果
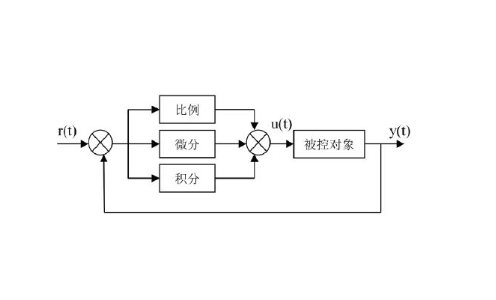
在自動控制系統中,P、I、D調節是比例調節,積分調節和微分調節作用。調節控制質量的好壞取決于控制規律的合理選取和參數的整定。在控制系統中總是希望被控參數穩定在工藝要求的范圍內。但在實際中被控參數總是與設定值有一定的差別。調節規律的選取原則為:調節規律有效,能迅速克服干擾。
比例、積分、微分之間的聯系與相匹配使用效果
比例調節簡單,控制及時,參數整定方便,控制結果有余差。因此,比例控制規律適應于對象容量大負荷變化不大純滯后小,允許有余差存在的系統,一般可用于液位、次要壓力的控制。
比例積分控制作用為比例及時加上積分可以消除偏差。積分會使控制速度變慢,系統穩定性變差。比例積分適應于對象滯后大,負荷變化較大,但變化速度緩慢并要求控制結果沒有余差。廣泛使用于流量,壓力,液位和那些沒有大的時間滯后的具體對象。
比例微分控制作用:響應快、偏差小,能增加系統穩定性,有超前控制作用,可以克服對象的慣性,控制結果有余差。適應于對象滯后大,負荷變化不大,被控對象變化不頻繁,結果允許有余差的系統。
在自動調節系統中,E=SP-PV。其中,E為偏差,SP為給定值,PV為測量值。當SP大于PV時為正偏差,反之為負偏差。比例調節作用的動作與偏差的大小成正比;當比例度為100時,比例作用的輸出與偏差按各自量程范圍的1:1動作。當比例度為10時,按lO:l動作。即比例度越小。比例作用越強。比例作用太強會引起振蕩。太弱會造成比例欠調,造成系統收斂過程的波動周期太多,衰減比太小。其作用是穩定被調參數。積分調節作用的動作與偏差對時間的積分成正比。即偏差存在積分作用就會有輸出。它起著消除余差的作用。積分作用太強也會引起振蕩,太弱會使系統存在余差。
微分調節作用的動作與偏差的變化速度成正比。其效果是阻止被調參數的一切變化,有超前調節的作用。對滯后大的對象有很好的效果。但不能克服純滯后。適用于溫度調節。使用微分調節可使系統收斂周期的時間縮短。微分時間太長也會引起振蕩。參數設定的方法一般是,先比例次積分后微分的順序進行。看曲線調參數,從調節品質的曲線逐步找到最佳參數.在隨動系統中,采用數字PI控制可以達到控制精度高、無超調、響應快、曲線擬合精度高等優點,并簡化了控制電路。傳統的位置式PI算法一般是可以達到基本控制要求,但必須有一個前提:控制周期要足夠小。如果控制周期過長,曲線擬合差,要達到15%的曲線擬合誤差有點困難,甚至可能會造成系統失控,并造成對機械設備的損傷。
因此,針對本文所提到的控制系統,不能簡單的采用位置式PI算法,而應該對其進行改進,以適應該控制系統的要求。比例系數K是和每次采樣的偏差值有直接關系,因此提高Kp能使系統響應較快;同時積分系數Ⅸ尾和前面所有的采樣偏差值有關,由于采樣周期長,每次采樣的誤差影響較大,因此降低積分系數對提高控制精度有好處。但提高比例系數和降低積分系數會使計算機每次輸出值的變化較大。
二
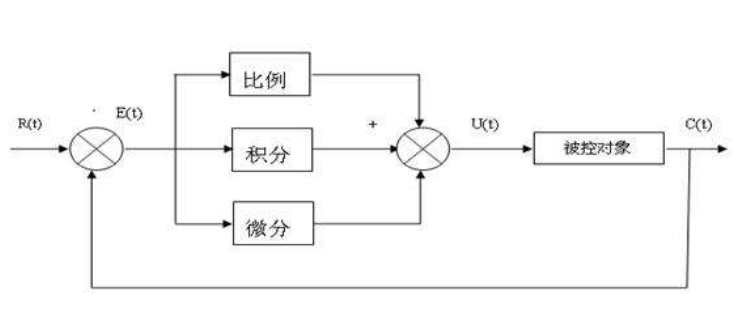
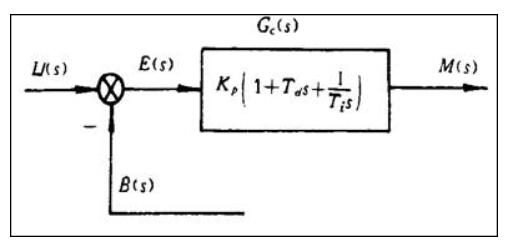
PID控制(實際中還有僅用到PI和PD的控制),就是根據系統的誤差或者加上系統誤差的變化率,利用比例、積分、微分計算出控制量進行控制。任何閉環控制系統的調節目標是使系統的響應達到快(快速)、準(準確)、穩(穩定)的最佳狀態,PID調整的主要工作就是如何實現這一目標。增大比例P項將加快系統的響應,其作用是放大誤差的幅值,它能快速影響系統的控制輸出值,但僅靠比例系數的作用,系統不能很好地穩定在一個理想的數值,其結果是雖較能有效地克服擾動的影響,但有穩態誤差出現。過大的比例系數還會使系統出現較大的超調并產生振蕩,使穩定性變差。積分I項的作用是消除穩態誤差,它能對穩定后有累積誤差的系統進行誤差修整,減小穩態誤差。在積分控制中,控制器的輸出與輸入誤差信號的積分成正比關系。
對一個自動控制系統,如果在進入穩態后存在穩態誤差,則稱這個控制系統為有差系統。為了消除穩態誤差,在控制器中必須引入積分項。積分項對誤差的作用取決于時間的積分,隨著時間的增加,積分項會增大。這樣,即便誤差很小,積分項也會隨著時間的增加而加大,它推動控制器的輸出向穩態誤差減小的方向變化,直到穩態誤差等于零。微分具有超前作用,對于具有滯后的控制系統,引入微分控制,在微分項設置得當的情況下,對于提高系統的動態性能指標有著顯著效果,它可以使系統超調量減小,穩定性增加,動態誤差減小。在微分控制中,控制器的輸出與輸入誤差信號的微分(即誤差的變化率)成正比關系。自動控制系統在克服誤差的調節過程中可能會出現振蕩甚至失穩,其原因是由于存在有較大慣性環節或滯后的被控對象,具有抑制誤差的作用,其變化總是落后于誤差的變化。解決的辦法是使抑制誤差作用的變化“超前”,即在誤差接近零時,抑制誤差的作用就應該是零。微分項能預測誤差變化的趨勢,從而做到提前使抑制誤差的控制作用等于零,甚至為負值,從而避免了被控量的嚴重超調,改善了系統在調節過程中的動態特性。
三
PID控制器參數調節的方法很多,概括起來有兩大類:
一是理論計算法,它主要是依據系統的數學模型,經過理論計算來確定控制器參數,這種方法可能會由于系統模型的不精確性使得所得到的PID參數不能直接應用,還必須通過工程實際進行調整和修改;
二是工程方法,它主要依賴工程經驗,直接在控制系統的試驗中進行,該方法簡單、易于掌握,在工程實際中被廣泛采用。工程實際中,PID控制器參數的調節方法主要有臨界比例法、反應曲線法和衰減法。3種方法各有其特點,其共同點都是通過試驗,然后按照工程經驗公式對控制器參數進行調節。但無論采用哪一種方法所得到的控制器參數,都需要在實際運行中進行最后調整與完善。
現在一般采用的是臨界比例法,利用該方法進行PID控制器參數的調節步驟如下:
①首先預選擇一個足夠短的采樣周期讓系統工作;
②僅加入比例控制環節,直到系統對輸入的階躍響應表現出臨界振蕩,記下這時的比例放大系數和臨界振蕩周期;
③在一定的控制度下通過公式計算得到PID控制器的參數。PID控制器參數的調試實例當調速系統的各項基本參數設定后,接下來是調整PID參數以取得最理想的控制效果。
下面以控制目標為恒定轉速的柴油機電站的PID調節器為例,具體說明工程法的調節步驟。
(1)比例參數:在保持轉速穩定時應使用最大比例增益。增加比例增益直到轉速開始波動,然后減小比例增益直到波動停止。如果一直沒有轉速波動,則抖動執行器連桿,然后減小比例增益直到波動停止。但比例增益太大會導致系統轉速出現振蕩,這時應減小比例增益。
(2)積分參數:在保持轉速穩定時應使用最大積分增益。增加積分增益直到轉速開始波動,然后減小積分增益直到波動停止。如果一直沒有轉速波動,則抖動執行器連桿,然后減小積分增益直到波動停止。但積分增益太大會導致系統轉速出現振蕩,這時應減小積分增益。
(3)微分參數:增加微分增益直到出現反應對負載瞬變有最小的超調量。但微分增益太大也會導致系統轉速出現振蕩,這時應減小微分增益。
(4)PID調整順序:調試時,可以先調比例參數,然后調積分參數,最后調微分參數,之后再調比例參數和積分參數。如果需要,重復進行(1)~(3)步驟,直至達到理想的效果。
PID控制是工程實際中應用最為廣泛的調節器控制規律,它具有結構簡單、穩定性好、工作可靠、調整方便等優點。但在實際在線調試中,需要遵循一定的規律,掌握一定的調試技巧才能又快又好地將控制系統調整到最佳的效果。溫度控制系統具有非線性、時變性和滯后性的特性,并且鍋爐水溫控制系統中的循環水也是強干擾,增加了系統控制的復雜性,常規PID控制效果不太理想,而模糊PID參數自整定控制算法對于解決溫度系統中的非線性、時變性和大延時起到明顯的改善效果,對干擾也具有較好的抑制詞節能力。
PID控制基礎理論
教學用PID參數調節實驗裝置的研究當前絕大多數生產過程的自動控制系統中采用的自動控制裝置,盡管它們的結構不同,但是它們具有的控制規律都是比例、積分和微分規律(即PID控制規律),敵稱之為PID控制器。在生產過程自動控制的發展過程中,PID控制器是歷史最久、生命力最強的基本控制裝置。PID控制器具有以下優點:
(1)原理簡單,應用方便。
(2)適應性強。已經廣泛應用于電力、機械、化工、熱工、冶金、建材和石油等各種蹩產部門。酃便是目前最薪發展的過程計算機控制系統,其基本的控制規律仍然是PID控制規律。
(3)魯棒性強。即其控制品質對被控對象特性的變化不敏感。大多數受控對象在受到外界擾動時,尤其是當外界負荷變化時,受控對象的動態特性往往會有較大的變化,為了滿足要求的控制性能,就需要經常改變控制器的參數,這是很麻煩的。
如果控制器的魯棒性好,就無需頻繁地改變控制器的參數。
-
自動控制系統
+關注
關注
1文章
192瀏覽量
19733 -
PID
+關注
關注
37文章
1480瀏覽量
87334
原文標題:PID 調節比例積分微分作用的特點和規律總結
文章出處:【微信號:gongkongworld,微信公眾號:工控資料窩】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
PID比例項 積分項 微分項 參數整定詳解
PID參數的調解,對于比例,積分,微分,都是對于偏移量的操作對嗎?
PID Controller比例積分微分控制器
PID控制器比例、積分、微分有什么控制規律?及應該在哪些場合使用
PID中比例控制和積分控制的作用 PID的參數整定過程





 工商網監
工商網監
評論