 融合計算突破界限,英特爾大小腦融合架構加速具身智能進化
融合計算突破界限,英特爾大小腦融合架構加速具身智能進化
電子發燒友網報道(文/莫婷婷)具身智能作為新興市場,有望為國內市場帶來新的增長點。自動化技術已在工業和各個行業得到應用,工業機器人廠商開始探索具身智能領域。然而人形機器人/具身智能還面臨著落地挑戰,例如數據匱乏、硬件設計的挑戰,落地確定性、安全性以及成本等問題。
為此,英特爾基于公司在AI領域的技術基礎,正式發布了基于酷睿Ultra系列處理器的具身智能大小腦融合方案,通過大小腦融合的單系統架構解決當前雙系統方案存在的問題,推動具身智能加速落地。
這是一套怎么樣的解決方案,能夠解決具身智能機器人的哪些痛點,落地情況如何?
雙系統架構難解具身智能落地難題
在具身智能機器人中,機器人的大腦負責處理從各種外部設備如傳感器收集的數據,通過分析這些數據來引導機器人的行為,做出相應決策。機器人的小腦專注于接收來自多種傳感器的信息,對這些信息進行處理與分析后,指導機器人的精確運動控制。
現階段,具身智能機器人主流算力平臺采用的是大小腦雙系統方案,小腦部分是以x86為主,包括英特爾12、13代酷睿,凌動N97、N305等,采用小板子實現功耗和尺寸的優化;大腦部分主流方案還是以業界主流GPU為主。兩個系統通過網絡進行通信,最終實現雙系統方案。
英特爾技術專家指出,雙系統方案的確是解決了部分問題,但很多時候更多是無奈之舉,因為現在市面上沒有單系統能同時提供CPU算力和GPU算力。雙系統方案存在硬件成本較高、功耗與尺寸優化空間有限、網絡通信不可控延遲、軟硬件研發成本上升等。
浙江人形機器人創新中心首席科學家、浙江大學求是特聘教授熊蓉在接受媒體采訪時表示,雙系統方案很難去做多種傳感器的融合,如果一些傳感器放在大腦上,它往下傳就會出現信息過大,對帶寬會有要求,有延遲等問題。
與此同時,具身智能計算負載需求不斷演變,從人工設計算法慢慢轉向到數據驅動模型的階段,計算也從CPU為主計算發展到CPU、GPU并重,甚至云端輔助的階段。
面向新的需求,當前大小腦融合架構采用的雙系統方案存在的痛點制約了具身智能的進一步發展。英特爾認為具身智能機器人的發展需要異構算力,單系統架構成為解題思路。
英特爾大小腦融合架構,AI計算能力近100 TOPS
英特爾中國網絡與邊緣技術產品總監王景佳表示,英特爾在AI領域進行了大量的產品研發,2023年英特爾發布酷睿Ultra系列處理器。它并非單純的CPU,而是突破性地把CPU、GPU、NPU封裝在一起,讓低功耗的SoC可以提供強勁的算力,由此滿足了具身智能在絕大多數場景需求。
圖:英特爾中國網絡與邊緣技術產品總監王景佳
英特爾以酷睿Ultra高性能異構SoC計算平臺為核心,英特爾結合硬件模塊化的設計,以及全新軟件開發套件和AI加速框架,推出了具身智能大小腦融合解決方案。
酷睿Ultra系列處理器集成了CPU、GPU和NPU三大處理單元,以提供強大的綜合性能,尤其是在AI相關的任務處理上。
CPU提供了X86算力與實現實時的運動控制,運行主頻最高可達5.1GHz。在AI工作負載下,其實時確定性可達到20微秒抖動。NPU的AI 性能/瓦特效率高達20 倍,在2W的工作負載下提供13 TOPS的AI推理能力。GPU能夠提供高性能推理與并行加速,實現最高77 TOP算力。這對于AI計算而言是非常大的助力,可以支持各類視覺模型、大型語言模型,甚至端到端大模型。
這些強大的性能,成為英特爾具身智能大小腦融合解決方案的基石。
英特爾技術專家介紹,在硬件層面,英特爾具身智能方案搭配英特爾酷睿Ultra核心板,基于Arrow Lake-H可提供高達96 TOPS的性能。基于18A的下一代Panther Lake將提供180 TOPS的性能,計劃在今年下半年發布。未來英特爾的產品算力還將進一步提升,為具備智能機器人的落地提供強大的算力支持。
方案還支持MxM嵌入式顯卡插槽,可以進一步擴展英特爾銳炫獨立顯卡,從而進一步擴展系統AI計算能力。還提供攝像頭轉接板以及獨立的IO載板。
在軟件與AI層面,英特爾提供全棧開發軟件。同時,為了更好支持實時運動控制,提供實時調優的BKC、RTLinux內核、EtherCAT IgH主站協議棧示例,適配EtherCAT接口電機。英特爾還在CPU上優化傳統視覺和運動規劃算法,通過iGPU和NPU優化基于深度學習和大模型的感知操作。

圖:英特爾具身智能軟件開發套件
英特爾技術專家表示,我們在集成顯卡(iGPU)上也進行了具身智能相關算法的測試。例如,對于機器人在物體檢測中常用的YOLO v8算法,在2048x2048高分辨率下,使用FP16的網絡精度進行測試,推理效率可以達到108 FPS,效率非常高。
此外,英特爾具身智能方案搭載了最新一代的英特爾銳炫B系列顯卡(Battlemage),采用Xe2架構核心。每個Xe核心的性能提升高達70%,每瓦性能也提升了50%。AI能力進一步擴展。
以6B-9B規模的大模型為例,在銳炫B系列顯卡上進行大語言模型推理測試顯示,首個token的生成時間約為100毫秒,后續token的生成時間約為10-15毫秒。這對于具身智能應用中的人機交互、內容生成,以及通過大語言模型進行動作編排的應用場景來說,都是非常出色的解決方案。
英特爾通過大小腦融合的方式,以基礎通用大模型與硬件技術的協同突破,以及開放生態所帶來的加速效應,推動具身智能向實踐應用場景的邁進。
具身智能大小腦融合方案加速落地
英特爾中國邊緣計算事業部行業解決方案高級總監李巖表示,具身智能機器人的核心在于“具身智能”,即通過物理實體與環境交互,實現感知、決策和控制。英特爾在機器人控制系統方面積累了豐富的經驗,尤其是在強實時性和可靠性方面。目前,市面上大部分機器人均采用英特爾芯片。

圖:英特爾中國邊緣計算事業部行業解決方案高級總監李巖
2025英特爾具身智能解決方案推介會上,信步科技副總經理葉志輝推出了具身智能硬件開發平臺HB03,搭載英特爾酷睿 Ultra 200系列處理器和英特爾銳炫 B570顯卡,AI性能更強大。HB03提供薄款(50×142×53mm)和厚款(150×142×78mm),薄款在保證系統可靠性、低功耗、高效散熱的前提下,提供了更緊湊的尺寸,能夠適配人形機器人內部空間限制。此外,HB03采用模塊化設計也更便于開發定制。

圖:信步科技具身智能硬件開發平臺HB03
浙江人形機器人創新中心也推出了基于英特爾酷睿處理器的人形機器人——“領航者2號NAVIAI”。與上一代相比,強化手臂作業能力,實現5公斤負載和0.1毫米精度,全身有41個自由度。“在具身智能方面,我們首先專注于打造底層控制,提供各個關節力位姿的高精準高實時控制,最高控制頻率可以達到4000Hz,英特爾CPU為其提供了很大的支撐。”熊蓉教授提到。
小結:
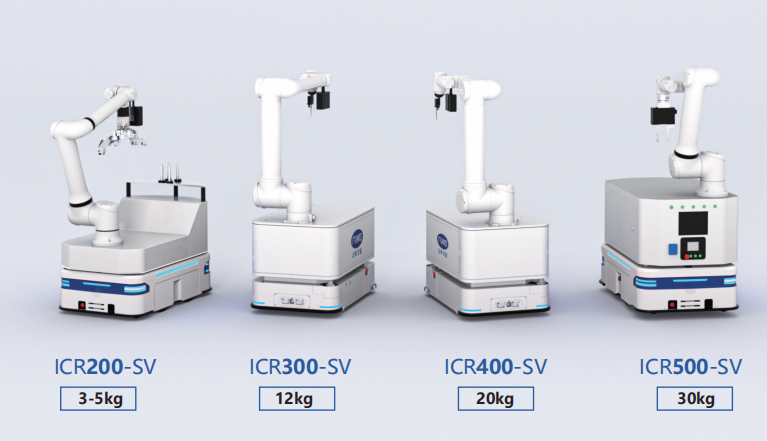
“在看待具身智能整個市場時,不僅要關注新興的人形機器人,更要看到更廣闊的、需要智能化賦能的市場。”英特爾認為,具身智能≠人形機器人,專用場景市場也有著巨大的機會,例如手臂機器人、AGV/AMR等。
英特爾推出的基于酷睿Ultra系列處理器的具身智能大小腦融合方案,為行業提供了高效、可靠的解決方案,也將成為具身智能領域的一次重要技術進步。通過開放生態與持續迭代,英特爾不僅推動了人形機器人的發展,也為更廣泛的智能設備市場帶來了新的機遇,如手臂機器人和AGV/AMR等,加速了具身智能技術的實際落地應用。
-
英特爾
+關注
關注
61文章
10166瀏覽量
173923
發布評論請先 登錄
突破智能駕艙邊界,Imagination如何構建高安全GPU+AI融合計算架構

英特爾與黑芝麻智能簽署合作備忘錄,聯合發布艙駕融合平臺


【「具身智能機器人系統」閱讀體驗】2.具身智能機器人的基礎模塊
【「具身智能機器人系統」閱讀體驗】2.具身智能機器人大模型
【「具身智能機器人系統」閱讀體驗】1.初步理解具身智能
《具身智能機器人系統》第7-9章閱讀心得之具身智能機器人與大模型
《具身智能機器人系統》第1-6章閱讀心得之具身智能機器人系統背景知識與基礎模塊

三大策略突破瓶頸,英特爾助力邊緣AI規模化發展
英特爾攜手軟通動力加速軟硬一體化融合創新
四大核心展區,英特爾在工博會展現AI與制造深度融合





 工商網監
工商網監
評論