") PI+重復控制的有源電力濾波器提高電力諧波控制效果
PI+重復控制的有源電力濾波器提高電力諧波控制效果
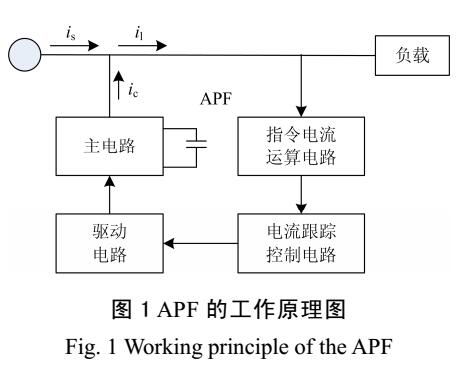
電網(wǎng)中諧波的大量存在對電力系統(tǒng)的正常運行提出了挑戰(zhàn)。為了更好地進行諧波處理,有源電力濾波器(APF)的設計與應用成為一大熱點。其設計的原理是通過采集系統(tǒng)中三相負載電流含量,計算其基波電流值,兩者做差即為相應的諧波電流分量[1],然后將此反向分量送給三相電源,完成對電網(wǎng)中諧波的抑制。三相四線制系統(tǒng)中因為不平衡電流的存在,在處理諧波同時,也需要完成對中線電流的補償。
1
系統(tǒng)模型
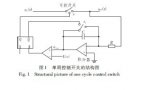
系統(tǒng)結(jié)構(gòu)采用四橋臂模型,在電容分裂式模型基礎上多一個橋臂,用此橋臂實現(xiàn)中線電流的補償,四相橋臂分別對應特定相電流進行跟蹤,發(fā)揮補償作用。不同于三橋臂結(jié)構(gòu)需要對直流側(cè)電容進行平衡,縮小電容電壓差,而且電路相對復雜,四橋臂結(jié)構(gòu)可直接對中線電流進行補償,電路相對簡單。APF拓撲結(jié)構(gòu)及工作示意圖如圖1所示。
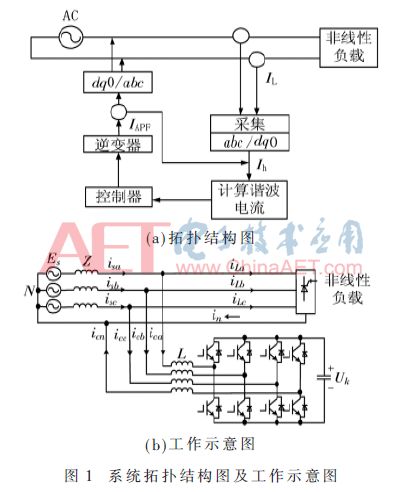
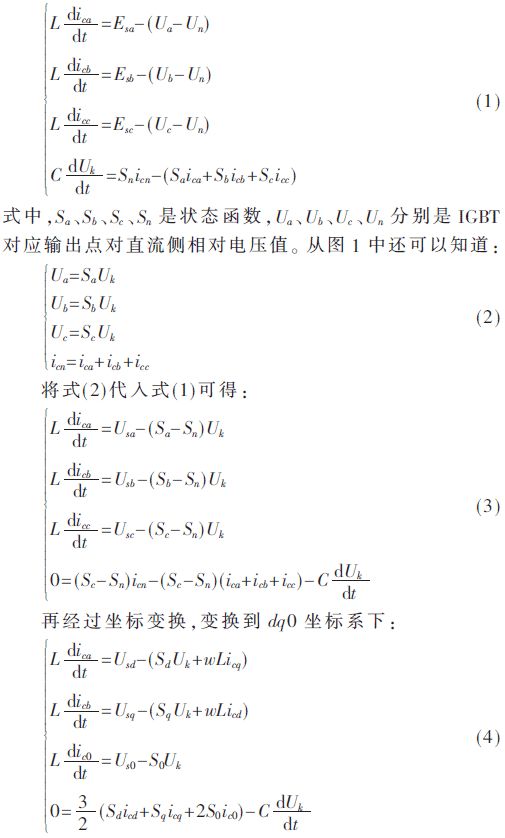
由圖1所示,列基爾霍夫方程:
系統(tǒng)采集三相電流 ica、icb、icc和中線電流in,測得電流中所含有的諧波含量,實時傳輸?shù)?a target="_blank">控制器對系統(tǒng)進行跟蹤產(chǎn)生補償電流量,輸送到對應相進行補償。
2
復合控制算法
系統(tǒng)通過ip-iq法得到補償指令信號,指令信號傳輸?shù)娇刂破鳎刂破餍柰瓿蓪χC波的抑制過程。
2.1 復合控制算法構(gòu)成
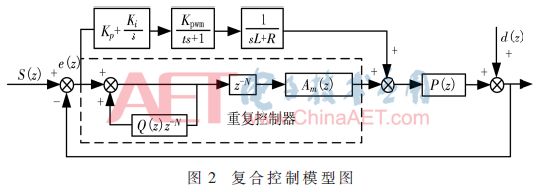
PI控制算法簡單[2-4],跟蹤速度快,但是穩(wěn)態(tài)性能差;重復控制穩(wěn)態(tài)性能好,但是跟蹤滯后一個周期[5],因此在對PI算法和重復算法進行研究的過程中,提出PI與重復控制并聯(lián)的模型,其基本模型如圖2所示。
2.1.1 PI控制器
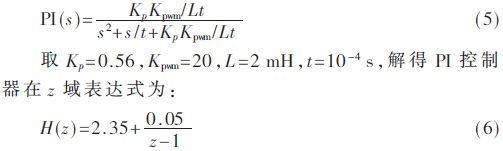
由圖2可知PI部分的閉環(huán)傳函為:
2.1.2 重復控制器
重復控制算法的核心是內(nèi)模原理,內(nèi)模主要是指對外部信號的一種描述[6],包含指令信號和擾動信號兩部分,使系統(tǒng)在跟蹤指令信號的同時,消除外部擾動影響,這種動態(tài)反饋控制系統(tǒng)具有良好的穩(wěn)態(tài)性能。離散模型如下:

其中,z-N是周期延遲環(huán)節(jié)。
由于系統(tǒng)基波信號是呈周期出現(xiàn)的,而且含有的諧波是基波周期的整數(shù)倍,因此認為外部信號是周期性變化的。z-N的作用是將此周期誤差值經(jīng)過延時作用于下周期的控制量。
另一重要組成部分是補償器。補償器根據(jù)所控對象P(z)的具體特性進行參數(shù)設置[7],根據(jù)上一周期已經(jīng)采集到的數(shù)據(jù)與這周期內(nèi)所測得的誤差,對所控對象的相位和幅值進行補償修正,每周期誤差進行累加直到誤差為零[8],不再存在修正參數(shù)時,會保持原值不變。其模型為:
2.2 自適應PI
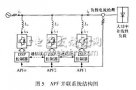
當系統(tǒng)中負載發(fā)生變化時,上述并聯(lián)控制器能夠在一定時間內(nèi)重新進行跟蹤,但是效果不理想。針對PI算法的這一缺點,提出神經(jīng)網(wǎng)絡PI算法構(gòu)成自適應PI控制器,迅速調(diào)節(jié)參數(shù)以保持整體狀態(tài),其基本結(jié)構(gòu)如圖3所示。
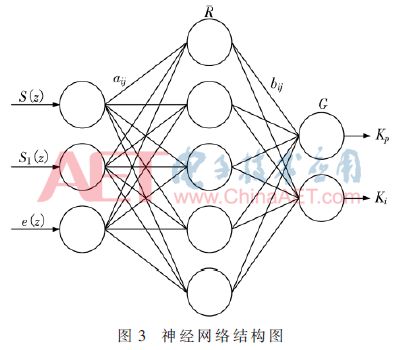
神經(jīng)網(wǎng)絡由3節(jié)點的輸入層(輸入量分別為指令量 S(z)、實際輸出 S1(z)和誤差 e(z))、2節(jié)點輸出層(自適應PI參數(shù)Kp和Ki)和5節(jié)點隱藏層構(gòu)成。
R函數(shù)為隱層輸出函數(shù),采用Sigmoid函數(shù):

G為輸出層函數(shù),由于其輸出值具有非負性,因此采用:

首先選定系統(tǒng)結(jié)構(gòu),確定每層權(quán)值的初始數(shù),選擇相應的學習速率及慣性系數(shù);將輸入值S和S1輸入系統(tǒng),即可得到Kp和Ki,系統(tǒng)通過權(quán)值的學習,調(diào)整各層加權(quán)參數(shù),實現(xiàn)自適應PI參數(shù)的自動調(diào)節(jié)。
3
仿真及分析
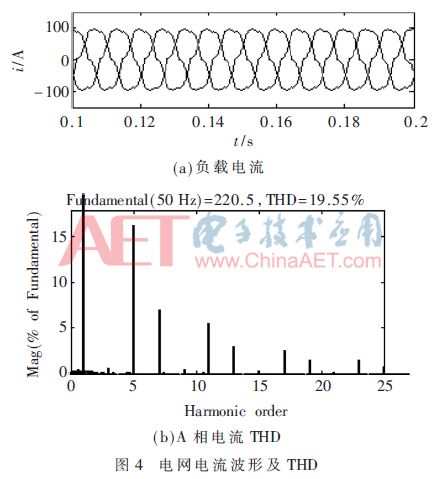
根據(jù)系統(tǒng)拓撲結(jié)構(gòu)及基本參數(shù),建立Simulink模型[10]。負載由整流橋和三相串聯(lián)RLC電路構(gòu)成,為了試驗效果,在A相接一個電感負載以產(chǎn)生中線電流。
對系統(tǒng)中負載電流進行測量,其波形如圖4(a)所示。由于諧波分量的存在,波形畸變嚴重,以A相為例,測得THD為19.55%,如圖4(b)所示。
為了檢驗改進后的補償效果,分別對3種算法進行Simulink仿真實驗,設置補償初始時間為0.1 s,圖5為采用PI控制法、重復控制法及并聯(lián)控制策略進行諧波補償時系統(tǒng)測得的THD值,圖6(a)為改進后的三相電流波形圖,測得的A相THD值如圖6(b)所示。
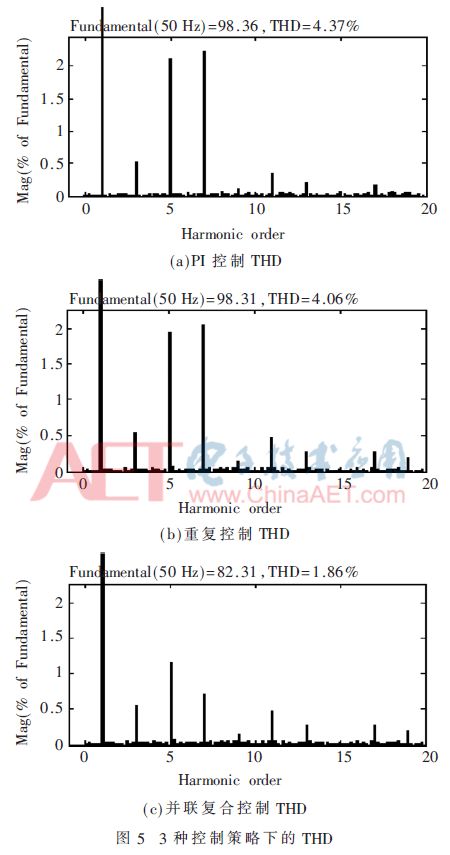
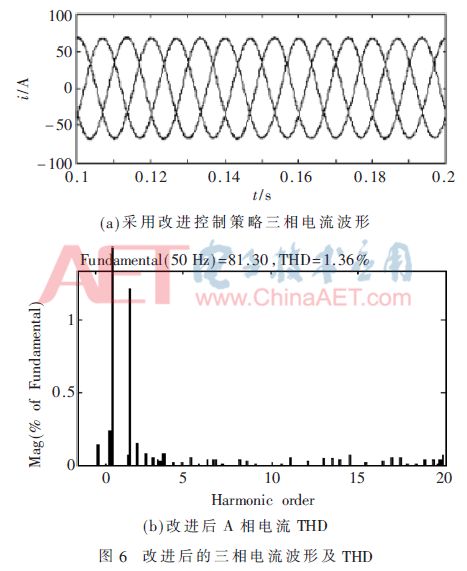
采用PI控制和重復控制對電網(wǎng)電流進行補償時都使波形有趨于正弦波的趨勢,但是不能達到很好的效果,補償后電流波形不是平滑的正弦波。采用PI控制和重復控制時,其THD分別是4.37%和4.06%,采用重復控制雖然相比于PI控制畸變率降低,但效果并不明顯,即兩種控制的效果均不理想。將兩種控制方法并聯(lián)后,得到THD為1.86%,在此方法下諧波得到一定的控制。而采用改進的自適應結(jié)構(gòu)后,電流波形基本接近基波波形,三相對稱,其諧波含量降低為1.36%,比簡單并聯(lián)時又降低了30%,因此采用改進控制器抑制諧波具有顯著效果。
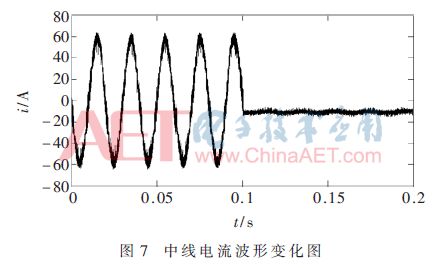
三相不平衡負載使系統(tǒng)出現(xiàn)中線電流,中線電流的存在會導致系統(tǒng)出現(xiàn)發(fā)熱現(xiàn)象,嚴重時會燒壞電子器件,令APF無法正常使用。如圖7所示,系統(tǒng)中線電流幅值達到60 A,設置APF在0.1 s進行補償操作,補償后的中線電流可以控制為在一定的范圍內(nèi)波動,比較平穩(wěn),控制效果較好。
為研究APF在系統(tǒng)負載發(fā)生突變的情況下補償效果,在0.15 s突加負載,系統(tǒng)迅速完成對各相電流的跟蹤及補償。控制器對指令電流進行跟蹤,0.1 s以前APF輸出電流為零,當APF開始工作以后,迅速跟蹤指令電流,在0.15 s當負載發(fā)生突變時,指令電流變大,APF在極短時間內(nèi)對新的指令電流進行跟蹤,輸出補償電流。圖8為APF電流跟蹤情況,可以發(fā)現(xiàn)采用簡單并聯(lián)模型對中線電流進行追蹤,其效果不如改進后效果理想。

仿真結(jié)果表明,采用復合控制對三相四線制電路進行諧波補償時,其抑制效果明顯,電網(wǎng)電流中諧波含量顯著下降,波形近似正弦波。當系統(tǒng)發(fā)生負載突變時,APF在一個周期內(nèi)迅速跟蹤變化的指令電流,調(diào)整輸出補償電流,使電網(wǎng)電流重新達到三相平衡。
4
結(jié)論
在低壓配電網(wǎng)中,系統(tǒng)中含有大量諧波成分,阻礙系統(tǒng)的運轉(zhuǎn)和發(fā)展,當負載出現(xiàn)不均衡時,就會出現(xiàn)中線電流,它的存在也會對電網(wǎng)產(chǎn)生影響。本文通過對比傳統(tǒng)PI、重復控制器、簡單并聯(lián)控制器和自適應復合控制器的諧波控制效果,發(fā)現(xiàn)改進控制器對系統(tǒng)諧波具有更好的控制作用,提高了供電質(zhì)量,基于復合控制的APF具有較高的應用價值。
-
濾波器
+關(guān)注
關(guān)注
162文章
8066瀏覽量
181005 -
PI
+關(guān)注
關(guān)注
12文章
225瀏覽量
112966 -
諧波
+關(guān)注
關(guān)注
7文章
865瀏覽量
42445 -
APF
+關(guān)注
關(guān)注
3文章
50瀏覽量
19833
原文標題:【學術(shù)論文】重復控制自適應PI控制器在APF中的應用
文章出處:【微信號:ChinaAET,微信公眾號:電子技術(shù)應用ChinaAET】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
基于i_p-i_q算法的DSP并聯(lián)有源電力濾波器設計
有源電力濾波器補償電流控制與主電路參數(shù)設計
采用雙DSP控制的并聯(lián)型有源電力濾波器
電力有源濾波器的工作原理是什么?
如何去實現(xiàn)一種APF有源電力濾波器設計
有源電力濾波器控制器
基于單周控制的電鐵有源電力濾波器
有源電力濾波器的并聯(lián)運行及控制
有源電力濾波器電流控制策略





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論