 UWB定位算法詳解(2025年更新版)
UWB定位算法詳解(2025年更新版)
一、基礎測距算法
?TW-TOF(雙向飛行時間法)?
通過標簽與基站之間的雙向信號交互計算飛行時間,消除時鐘同步依賴。公式為:
S = frac{C times [(T_{a2} - T_{a1}) - (T_{b2} - T_{b1})]}{2}S=2C×[(Ta2?Ta1)?(Tb2?Tb1)]
其中,CC為光速,T_{a1}/T_{a2}Ta1/Ta2為標簽發送/接收時間戳,T_{b1}/T_{b2}Tb1/Tb2為基站響應時間戳。該方法顯著降低設備同步要求,適合動態場景?。
?TWR(雙向測距法)?
在TW-TOF基礎上優化,通過多輪信號交互(請求-響應-確認)提升抗干擾能力。標簽與基站交替發射信號,計算多次往返時間均值,精度可達厘米級?。
二、核心定位算法
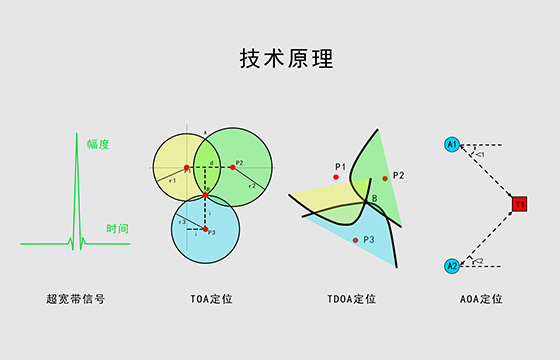
?TOA(到達時間法)?
?原理?:通過測量信號從標簽到基站的單程傳播時間計算距離,需標簽與基站嚴格同步時鐘。
?公式?:d = c times td=c×t,誤差來源于時鐘同步精度(納秒級誤差可導致米級定位偏差)?。
?應用?:高精度工業制造場景(如芯片裝配),需配合原子鐘或光纖同步技術?。
?TDOA(到達時間差法)?
?原理?:多個基站接收同一標簽信號,計算信號到達各基站的時間差,通過雙曲線相交確定位置。
?優勢?:僅需基站間同步,降低系統復雜度;適合大規模部署場景(如智能工廠、倉儲物流)?。
?案例?:某汽車工廠采用TDOA算法實時追蹤500+設備,定位誤差<15cm?。
?AOA(到達角法)?
通過天線陣列測量信號入射角度,結合單基站實現二維定位。優勢在于低基站密度需求,但易受多徑效應影響,需配合濾波算法優化?。
三、定位計算與優化方法
?三邊定位法(Trilateration)?
?原理?:以三個基站為圓心、測距值為半徑畫圓,交點即為標簽位置。
?公式?:基于幾何方程組求解:
?????(x?x1)2+(y?y1)2=d21(x?x2)2+(y?y2)2=d22(x?x3)2+(y?y3)2=d23
{(x?x1)2+(y?y1)2=d12(x?x2)2+(y?y2)2=d22(x?x3)2+(y?y3)2=d32
???(x?x1)2+(y?y1)2=d12(x?x2)2+(y?y2)2=d22(x?x3)2+(y?y3)2=d32
?缺陷?:實際測量誤差導致圓無法完美相交,需引入最小二乘法優化?。
?最小二乘優化(LSM)?
用于處理多基站冗余數據,通過最小化殘差平方和求解最優位置。公式為:
hat{theta} = (H^T H)^{-1} H^T zθ^=(HTH)?1HTz
其中,HH為幾何矩陣,zz為觀測向量,顯著提升復雜環境下的定位穩定性?。
四、算法對比與場景適配

五、技術挑戰與優化方向
?非視距(NLoS)誤差?:通過融合慣性傳感器(IMU)數據或LiDAR點云,修正信號遮擋導致的誤差?。
?多徑干擾抑制?:采用跳時擴頻(TH-SS)和脈沖整形技術,增強復雜電磁環境下的信號魯棒性?。
?低功耗設計?:優化標簽的間歇性喚醒機制,延長電池壽命(品鉑科技 醫療監護標簽續航>2年)?。
以上內容綜合UWB主流算法原理與產業實踐,涵蓋測距、定位計算及優化全流程,適用于工業、物流、醫療等場景的高精度需求?。
審核編輯 黃宇
-
算法
+關注
關注
23文章
4698瀏覽量
94739 -
UWB
+關注
關注
32文章
1160瀏覽量
62317
發布評論請先 登錄
UWB單基站360°測距定位400米,二維測距定位解決方案
UWB 定位測距
隧道UWB定位管理系統
基于 NXP NCJ29D5D UWB 定位算法方案


如何應對UWB室內定位信號被遮擋

UWB標簽與其他定位技術的比較
UWB技術如何實現不同維度的定位需求
高精度定位系統(UWB)在隧道安全管理中的創新應用

煤礦人員定位系統——基于UWB技術帶電子圍欄功能
一文介紹:UWB定位基站種類及選擇

UWB室內外高精度一體化融合定位系統源碼 UWB技術定位系統應用場景 Java+Spring boot+MYSQL?技術開發
基于java+單體服務 +?硬件(UWB定位基站、卡牌)技術架構開發的UWB室內定位系統源碼






 工商網監
工商網監
評論