 步進電機原理及使用教程
步進電機原理及使用教程

一、步進電機原理
步進電機是一種將電脈沖信號轉換為角位移或線位移的電動機。它的工作原理基于電磁學原理,通過電能轉化為機械能。當步進電機接收到一個脈沖信號時,它的轉子會轉動一個固定的角度,這個角度被稱為步距角。因此,步進電機的角位移量與輸入的脈沖個數嚴格成正比,而且在時間上與脈沖同步。
步進電機的工作原理可以進一步細分為以下幾個步驟:
1. 驅動器接收信號:步進電機的驅動器接收外部的控制脈沖和方向信號。
2. 邏輯電路控制:驅動器內部的邏輯電路按照一定的時序控制電機的繞組進行通電。
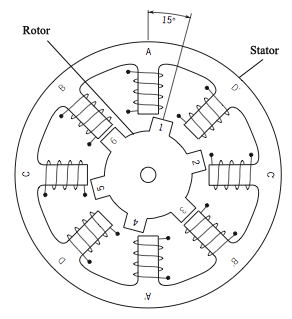
3. 轉子旋轉:通電后的繞組會產生磁場,與轉子上的永磁體或軟磁材料相互作用,從而使轉子旋轉。
4. 鎖定位置:當兩相繞組都通電時,電機將保持靜止并鎖定位置。這個鎖定的力矩在額定電流下達到最大,被稱為保持力矩。
步進電機還可以根據勵磁方式的不同分為磁阻式、永磁式和混磁式三種,以及根據相數的不同分為單相、兩相、三相和多相等形式。
二、步進電機使用教程
1. 選擇適當的步進電機:
● 根據應用需求選擇合適的步進電機型號,包括步距角、最大靜力矩、額定電流等參數。
● 確保所選步進電機的尺寸和重量適合安裝空間和使用環境。
2. 連接驅動器:
● 將步進電機與專用的驅動器連接。驅動器負責將控制脈沖和方向信號轉換為步進電機所需的電流和電壓。
● 根據步進電機的相數和驅動器的要求,正確連接電機的線圈和驅動器的輸出端。
3. 設置控制參數:
● 在驅動器上設置控制參數,如脈沖頻率、細分步數等。這些參數將決定步進電機的轉速、步距角和運行平穩性。
● 根據應用需求調整參數,以獲得最佳的運動性能和精度。
4. 編寫控制程序:
● 使用單片機、PLC或其他控制器編寫控制程序,以產生控制脈沖和方向信號。
● 程序應能夠根據需要調整脈沖頻率和步數,以實現步進電機的精確控制。
5. 調試和運行:
● 在連接好電路并設置好參數后,進行步進電機的調試。觀察電機的運行情況,檢查是否有異常聲音、振動或失步現象。
● 根據調試結果調整參數或程序,以確保步進電機能夠穩定運行并滿足應用需求。
6. 維護和保養:
● 定期檢查步進電機和驅動器的連接和固定情況,確保無松動或損壞。
● 清潔電機和驅動器表面的灰塵和污垢,以保持散熱良好。
● 注意電機的工作溫度和濕度范圍,避免超出規定值導致性能下降或損壞。
三、注意事項
1. 避免超載:確保步進電機在不超過其最大靜力矩的情況下工作,以避免過載損壞。
2. 合理設置參數:根據應用需求合理設置脈沖頻率、細分步數等參數,以獲得最佳的運動性能和精度。
3. 注意散熱:步進電機在工作時會產生熱量,應確保散熱良好以避免過熱損壞。
4. 選擇合適的驅動器:選擇與步進電機相匹配的驅動器,以確保電機能夠穩定運行并發揮最佳性能。
通過以上步驟和注意事項,您可以正確地使用步進電機并實現精確的控制。
審核編輯 黃宇
-
步進電機
+關注
關注
152文章
3157瀏覽量
149126
發布評論請先 登錄
行星減速步進電機與步進電機的區別

步進電機如何自適應控制?步進電機如何細分驅動控制?
步進電機的控制技術及發展概況有哪些?
步進電機主要有哪些分類?步進電機的主要構造是什么?
什么是步進電機?它的工作原理是什么?

什么是步進電機?步進電機的類型和結構






 工商網監
工商網監
評論