") 運動控制與機(jī)器人密切相關(guān):機(jī)器人的電機(jī)控制原理
運動控制與機(jī)器人密切相關(guān):機(jī)器人的電機(jī)控制原理
機(jī)器人的應(yīng)用日漸廣泛,對工業(yè)生產(chǎn)與提高效能有重要作用。工業(yè)機(jī)器人主要利用伺服電機(jī)進(jìn)行運動控制,從而實現(xiàn)移動和抓取工具。本文將詳細(xì)討論伺服電機(jī)的特點以及不同類型伺服電機(jī)相應(yīng)的控制原理。
運動控制原理
運動控制與機(jī)器人密切相關(guān)。工業(yè)應(yīng)用中的機(jī)器人必須透過由多款電機(jī)所構(gòu)成的致動器才能自行移動,以執(zhí)行任務(wù)或透過機(jī)器手臂抓取工具。
機(jī)器人的運動控制系統(tǒng)通常由電機(jī)控制器、電機(jī)驅(qū)動、電機(jī)本體(多為伺服電機(jī))組成。電機(jī)控制器具備智能運算功能,并可傳送指令以驅(qū)動電機(jī)。驅(qū)動可提供增壓電流,根據(jù)控制器指令以驅(qū)動電機(jī)。電機(jī)可以直接移動機(jī)器人,也可通過傳動系統(tǒng)或鏈條系統(tǒng)讓機(jī)器人移動。
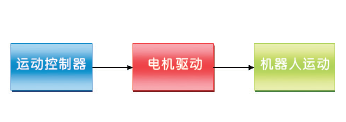
圖1:機(jī)器人的運動控制系統(tǒng)。
輸出類型
移動機(jī)器人往往用于探索大范圍面積的土地,并能夠使用各種螺旋槳、機(jī)器腳、輪子、軌道或機(jī)器臂移動。例如各種NI展示平臺,包括VINI、VolksBot與Isadora。這些機(jī)器人分別使用了全向輪(Mecanum wheel)、一般輪以及機(jī)器手臂。而針對嵌入式控制,則可通過NI CompactRIO等嵌入式平臺,并整合實時控制器與FPGA。CompactRIO亦包含可重配置機(jī)箱,能夠容納多樣化的I/O配置,包含傳感器輸入與電機(jī)控制。
VINI是使用全向輪的機(jī)器人平臺,能以多方向行進(jìn)。除了像傳統(tǒng)輪子般的前進(jìn)與后退,全向輪亦可將輪軸旋轉(zhuǎn)為相反方向,以任何方向行進(jìn)。此款車輪已普遍用于必須能在狹小空間中移動的自動堆高機(jī)等應(yīng)用。
VINI還是一款地圖描繪機(jī)器人,通過NI工業(yè)級控制器與CompactRIO執(zhí)行路徑規(guī)劃與數(shù)據(jù)處理作業(yè)。嵌入式的工業(yè)級控制器提供雷射掃描地圖,并執(zhí)行機(jī)器視覺處理,讓CompactRIO接收傳感器數(shù)據(jù),并在攝像機(jī)系統(tǒng)上控制伺服電機(jī)。
圖2:VINI機(jī)器人。
VolksBot搭載的車輪是由德國的弗勞恩霍夫研究所(Fraunhofer Institute)所開發(fā)的。
圖3:德國Fraunhofer Institute研究機(jī)構(gòu)開發(fā)的RT3 VolksBot。
Isadora則是一種會跳舞的人形機(jī)器人,經(jīng)由人類操作縮小版的機(jī)器人以取得輸入數(shù)據(jù)。接著開始移動自己的機(jī)器手臂與軀干,以模仿縮小版機(jī)器人的運動。Isadora采用2組CompactRIO,其中1組用于仿真已記錄的運動,另1組則是讓機(jī)器人重現(xiàn)運動軌跡。
圖4:Isadora跳舞機(jī)器人。
伺服電機(jī)控制原理及其類型
伺服電機(jī)是機(jī)器人應(yīng)用中常見的一種電機(jī),其基本控制原理是利用控制回路、結(jié)合必要的電機(jī)反饋,從而協(xié)助電機(jī)進(jìn)入所需的狀態(tài),如位置與速度等。由于伺服電機(jī)必須通過控制回路了解目前狀態(tài),因此其穩(wěn)定性高于步進(jìn)電機(jī)。
伺服電機(jī)有不同種類——帶刷式與無刷式。有刷伺服電機(jī)與無刷伺服電機(jī)之間的差異在于其通訊機(jī)制。伺服電機(jī)的工作原理是根據(jù)反向磁力,進(jìn)而移動或建立轉(zhuǎn)矩。最簡單的例子有固定磁場與旋轉(zhuǎn)磁場。只要改變流過磁場的電流方向,即可變更磁極,并讓磁極(轉(zhuǎn)子)開始旋轉(zhuǎn)。變更線圈的電流方向,即所謂的“換相”(commutation)。
有刷伺服電機(jī)
有刷伺服電機(jī)(brushed motor)的控制原理即是通過機(jī)械式電刷,改變電機(jī)線圈中的電流。由于有刷電機(jī)能改變流入的電流方向,因此可由直流電源(DC)供電。有刷伺服電機(jī)可分為2組零件:
電機(jī)機(jī)殼即具有場磁鐵(Field magnet),即定子(Stator)
轉(zhuǎn)子(Rotor)是由線圈所構(gòu)成,中間具有鐵制核心,并連接至電流變換器
電刷則接觸電流變換器,將電流導(dǎo)入線圈中。在使用一段時間之后,電刷即可能磨耗并對系統(tǒng)產(chǎn)生摩擦力;但在無刷伺服電機(jī)中則不會發(fā)生此種情況。
無刷伺服電機(jī)
大多數(shù)的無刷伺服電機(jī)均使用交流電源(AC)。無刷伺服電機(jī)的控制原理是將鐵制核心置于外部。當(dāng)轉(zhuǎn)子成為暫時性的磁鐵,定子則成為繞鐵線圈。外部電路的電流將會在既定的轉(zhuǎn)子位置進(jìn)行反轉(zhuǎn)。所以,此款伺服電機(jī)是由交流電所驅(qū)動的。當(dāng)然亦有無刷DC伺服電機(jī)。這些電機(jī)一般均具備某些電子切換電路,可針對流入的DC進(jìn)行變換。無刷伺服電機(jī)的價位較高,但較無磨損問題。
步進(jìn)電機(jī)
在機(jī)器人運動應(yīng)用中,步進(jìn)電機(jī)不如伺服電機(jī)普及,但仍為電機(jī)的重要范例,而且使用方式較為簡易。與伺服電機(jī)相比,步進(jìn)電機(jī)的速度較慢亦較為精確。步進(jìn)電機(jī)中具有一系列內(nèi)建的無刷齒(Brushless teeth),可在電流通過而改變電磁電荷后,由下一組刷齒拉動轉(zhuǎn)子,前一組刷齒推動轉(zhuǎn)子,從而為步進(jìn)電機(jī)通電。
相較于伺服電機(jī),由于步進(jìn)電機(jī)可通過刷齒的數(shù)量(即等于所移動的距離)進(jìn)而精確進(jìn)行控制,因此一般情況下并不需要反饋。但可能因為障礙物而遺漏刷齒,因此可用編碼器做為反饋。
運動控制器與軟件架構(gòu)
許多制造商均建立了自家的驅(qū)動系統(tǒng),以操控機(jī)器人。在考慮機(jī)器人應(yīng)用中的運動控制系統(tǒng)時,可先了解初階的網(wǎng)狀循環(huán),如下圖所示。
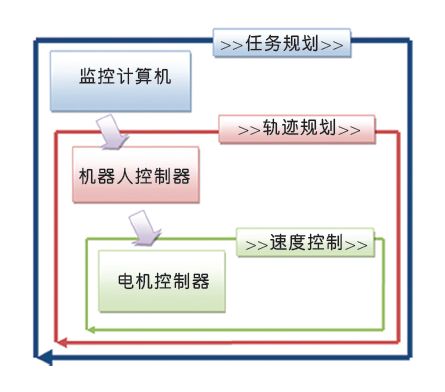
圖5:運動控制軟件架構(gòu)。
至于機(jī)器人任務(wù)規(guī)劃的較高階功能,則是讓機(jī)器人的行動達(dá)到最終的目標(biāo)。它可能是以單一指令囊括多組目標(biāo),或可讓機(jī)器人進(jìn)入特定位置。若機(jī)器人采用遙控(Tele-operated)架構(gòu),那么這些指令最可能通過連接板外(off-board)的計算機(jī)而傳送的,而且可在此人為操作選擇機(jī)器人的后續(xù)動作或行為。在完全自動化的機(jī)器人中,根據(jù)決策用算法的不同,任務(wù)規(guī)劃亦可能直接在板上執(zhí)行。
在規(guī)劃路徑時,往往會產(chǎn)生“我應(yīng)該如何到目的地以完成此任務(wù)?”或是“我應(yīng)如何讓機(jī)器手臂移動到該位置?”等問題。而此種問題均可由機(jī)器人運動控制器完成。
一旦清楚目的地與行進(jìn)速度之后,伺服電機(jī)控制器將發(fā)出控制信號(PWM或電流等)至實際的電機(jī)驅(qū)動,使其得以到達(dá)目的地。一般均以PID建構(gòu)控制功能。另請注意,此時亦應(yīng)建置安全性功能。舉例來說,若高速行進(jìn)中的機(jī)器人在目前的路徑上偵測到人類,則應(yīng)發(fā)出緊急信號以停止電機(jī)或立刻煞車。
-
機(jī)器人
+關(guān)注
關(guān)注
213文章
29475瀏覽量
211528 -
電機(jī)
+關(guān)注
關(guān)注
143文章
9248瀏覽量
148322
發(fā)布評論請先 登錄
《機(jī)器人設(shè)計與實現(xiàn)》——低成本DIY機(jī)器人,一本機(jī)器人制作的經(jīng)典入門書
工業(yè)機(jī)器人的基本結(jié)構(gòu)
什么是工業(yè)機(jī)器人
機(jī)器人依靠什么裝置運動?
先進(jìn)機(jī)器人控制
【MYD-Y6ULX申請】機(jī)器人運動控制板(電機(jī)控制)項目
工業(yè)機(jī)器人的技術(shù)原理
機(jī)器人基礎(chǔ)書籍
傳感器解決機(jī)器人發(fā)展的常見問題
機(jī)器人運動控制技術(shù)
機(jī)器人系統(tǒng)與控制需求簡介
機(jī)器人的控制系統(tǒng)
機(jī)器人是什么?
機(jī)器人的伺服電機(jī)控制原理是什么






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論