") CW32模塊使用 BMP180氣壓傳感器
CW32模塊使用 BMP180氣壓傳感器
一、模塊來(lái)源
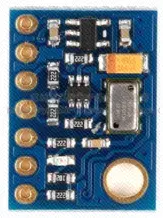
模塊實(shí)物展示:
資料下載鏈接:
https://pan.baidu.com/s/1miTIphm
二、規(guī)格參數(shù)
工作電壓:1.8~3.6V
工作電流:0.1~1000uA
溫度精度:±1℃
溫度范圍:0~65℃
氣壓范圍:300~1100 hPa
氣壓精度:1 hPa
輸出方式: IIC
管腳數(shù)量:3 Pin
以上信息見(jiàn)廠家資料文件
三、移植過(guò)程
我們的目標(biāo)是將例程移植至CW32F030C8T6開(kāi)發(fā)板上【能夠測(cè)量環(huán)境溫度、氣壓、高度】。首先要獲取資料,查看數(shù)據(jù)手冊(cè)應(yīng)如何實(shí)現(xiàn)讀取數(shù)據(jù),再移植至我們的工程。
3.1查看資料
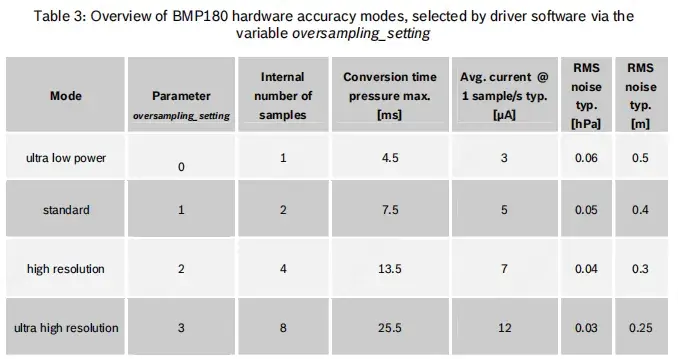
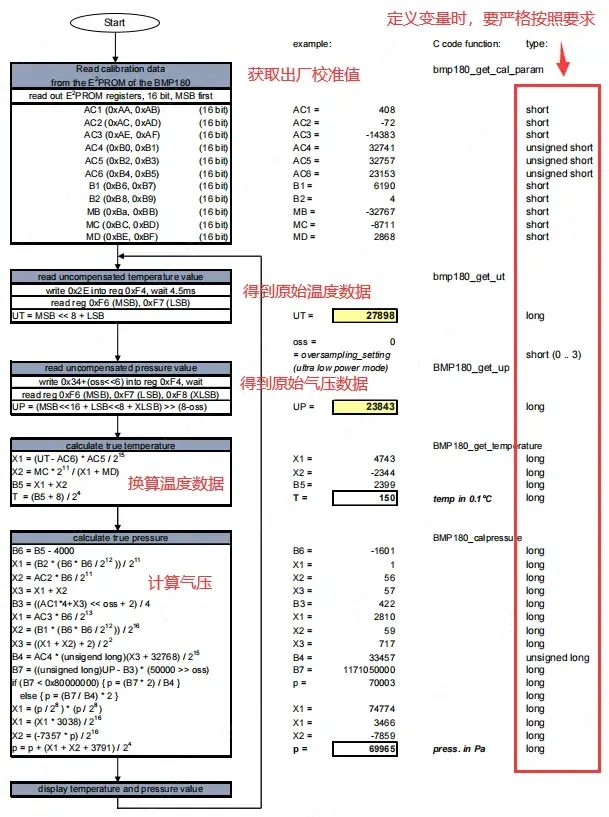
BMP180共有四種工作模式,每種模式有不同的采樣數(shù)量、轉(zhuǎn)換速度和噪聲等參數(shù)的不同。可以通過(guò)寫(xiě)入ctrl_meas寄存器來(lái)設(shè)置模式,默認(rèn)為第一個(gè)ultra low power超低功耗。
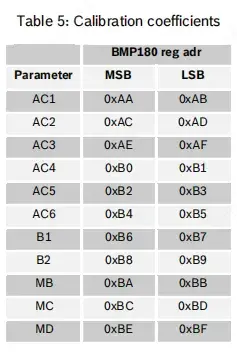
BMP180的氣壓和溫度數(shù)值并不是可以直接讀取的,每個(gè)不同的傳感器中,都有自己獨(dú)特的校準(zhǔn)數(shù)值,存儲(chǔ)在內(nèi)置的E2PROM存儲(chǔ)器中。當(dāng)微處理器讀取傳感器的原始溫度和氣壓數(shù)值后,再根據(jù)E2PROM中的校準(zhǔn)數(shù)值進(jìn)行轉(zhuǎn)換,才能得到真正的溫度、氣壓數(shù)據(jù)。每個(gè)校準(zhǔn)數(shù)值的存儲(chǔ)位置如下,微處理器通過(guò)這些地址讀取校準(zhǔn)數(shù)值。
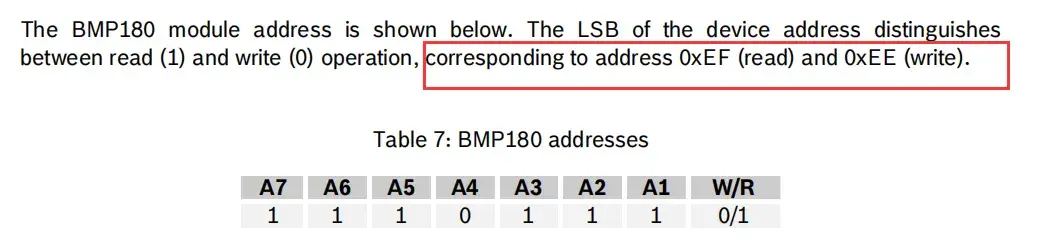
和所有的IIC總線器件一樣,BMP180也有一個(gè)器件的固定地址,根據(jù)其數(shù)據(jù)手冊(cè),出廠時(shí)默認(rèn)BMP180的從機(jī)地址為0xEE(寫(xiě)入方向),或0xEF(讀出方向)。
以下為讀取溫度與氣壓的步驟:
把16位的校準(zhǔn)數(shù)值讀取到單片機(jī)中,可以看到一共有11個(gè)數(shù)值。需要注意的是高位存儲(chǔ)在MSB地址,低位存儲(chǔ)在LSB地址。例如數(shù)值AC1,高八位存儲(chǔ)在0xAA地址,低八位存儲(chǔ)在0xAB地址。
溫度初始值讀取步驟:
往寄存器0xf4寫(xiě)入0x2e,等待4、5ms;
讀0xf6(高八位)和0xf7(低八位)兩個(gè)寄存器;
進(jìn)行換算: UT=MSB <<8 +LSB。
氣壓初始值讀取步驟:
往寄存器0xf4寫(xiě)入0x34(如果不是默認(rèn)的工作模式,需要加上oss左移六位的結(jié)果,oss為設(shè)置工作模式的寄存器0xf4的bit7、bit6位),等待4、5ms;
讀0xf6(16-23位)、0xf7(8-15位)和0xf8(0-7位)三個(gè)寄存器;
進(jìn)行換算: UP=MSB <<16 + LSB<<8 + XLSB >> (8-oss(這個(gè)同溫度初始值讀取一樣))。
根據(jù)第一步讀出來(lái)的校準(zhǔn)系數(shù)和第二步讀出來(lái)的UT、UP進(jìn)行換算,最后得出來(lái)的T(溫度,每個(gè)數(shù)值代表0.1攝氏度),p(氣壓,每個(gè)數(shù)值代表1帕)。
3.2引腳選擇
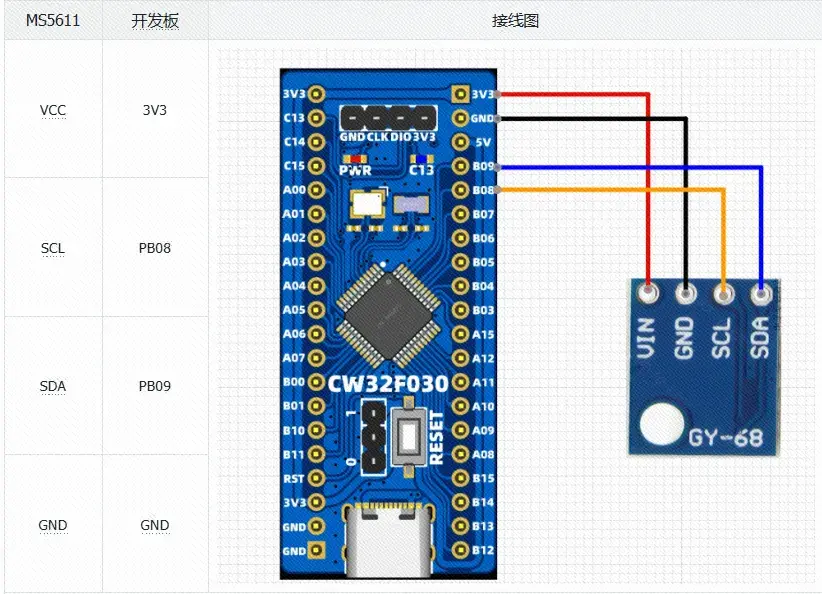
模塊接線圖
3.3移植至工程
移植步驟中的導(dǎo)入.c和.h文件與【CW32模塊使用】DHT11溫濕度傳感器相同,只是將.c和.h文件更改為bsp_bmp180.c與bsp_bmp180.h。這里不再過(guò)多講述,移植完成后面修改相關(guān)代碼。
在文件bsp_bmp180.c中,編寫(xiě)如下代碼。
/* * Change Logs: * Date Author Notes * 2024-06-20 LCKFB-LP first version */ #include "bsp_bmp180.h" #include "stdio.h" #include "math.h" typedef struct _BMP180_STRUCT{ short AC1; short AC2; short AC3; uint16_t AC4; uint16_t AC5; uint16_t AC6; short B1; short B2; short MB; short MC; short MD; }_BMP180_PARAM_; _BMP180_PARAM_ param={0}; long B5 = 0; /****************************************************************** * 函 數(shù) 名 稱(chēng):BMP180_GPIO_Init * 函 數(shù) 說(shuō) 明:BMP180的引腳初始化 * 函 數(shù) 形 參:無(wú) * 函 數(shù) 返 回:無(wú) * 作 者:LC * 備 注:無(wú) ******************************************************************/ void BMP180_GPIO_Init(void) { GPIO_InitTypeDef GPIO_InitStruct; // GPIO初始化結(jié)構(gòu)體 RCC_BMP180_ENABLE(); // 使能GPIO時(shí)鐘 GPIO_InitStruct.Pins = GPIO_SDA|GPIO_SCL; // GPIO引腳 GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_OD; // 開(kāi)漏輸出 GPIO_InitStruct.Speed = GPIO_SPEED_HIGH; // 輸出速度高 GPIO_Init(PORT_BMP180, &GPIO_InitStruct); // 初始化 } /****************************************************************** * 函 數(shù) 名 稱(chēng):IIC_Start * 函 數(shù) 說(shuō) 明:IIC起始時(shí)序 * 函 數(shù) 形 參:無(wú) * 函 數(shù) 返 回:無(wú) * 作 者:LC * 備 注:無(wú) ******************************************************************/ void IIC_Start(void) { SDA_OUT(); SDA(1); delay_us(5); SCL(1); delay_us(5); SDA(0); delay_us(5); SCL(0); delay_us(5); } /****************************************************************** * 函 數(shù) 名 稱(chēng):IIC_Stop * 函 數(shù) 說(shuō) 明:IIC停止信號(hào) * 函 數(shù) 形 參:無(wú) * 函 數(shù) 返 回:無(wú) * 作 者:LC * 備 注:無(wú) ******************************************************************/ void IIC_Stop(void) { SDA_OUT(); SCL(0); SDA(0); SCL(1); delay_us(5); SDA(1); delay_us(5); } /****************************************************************** * 函 數(shù) 名 稱(chēng):IIC_Send_Ack * 函 數(shù) 說(shuō) 明:主機(jī)發(fā)送應(yīng)答或者非應(yīng)答信號(hào) * 函 數(shù) 形 參:0發(fā)送應(yīng)答 1發(fā)送非應(yīng)答 * 函 數(shù) 返 回:無(wú) * 作 者:LC * 備 注:無(wú) ******************************************************************/ void IIC_Send_Ack(unsigned char ack) { SDA_OUT(); SCL(0); SDA(0); delay_us(5); if(!ack) SDA(0); else SDA(1); SCL(1); delay_us(5); SCL(0); SDA(1); } /****************************************************************** * 函 數(shù) 名 稱(chēng):I2C_WaitAck * 函 數(shù) 說(shuō) 明:等待從機(jī)應(yīng)答 * 函 數(shù) 形 參:無(wú) * 函 數(shù) 返 回:0有應(yīng)答 1超時(shí)無(wú)應(yīng)答 * 作 者:LC * 備 注:無(wú) ******************************************************************/ unsigned char I2C_WaitAck(void) { char ack = 0; unsigned char ack_flag = 10; SCL(0); SDA(1); SDA_IN(); delay_us(5); SCL(1); delay_us(5); while( (SDA_GET()==1) && ( ack_flag ) ) { ack_flag--; delay_us(5); } if( ack_flag <= 0 ) { IIC_Stop(); return 1; } else { SCL(0); SDA_OUT(); } return ack; } /****************************************************************** * 函 數(shù) 名 稱(chēng):Send_Byte * 函 數(shù) 說(shuō) 明:寫(xiě)入一個(gè)字節(jié) * 函 數(shù) 形 參:dat要寫(xiě)人的數(shù)據(jù) * 函 數(shù) 返 回:無(wú) * 作 者:LC * 備 注:無(wú) ******************************************************************/ void Send_Byte(uint8_t dat) { int i = 0; SDA_OUT(); SCL(0);//拉低時(shí)鐘開(kāi)始數(shù)據(jù)傳輸 for( i = 0; i < 8; i++ ) { SDA( (dat & 0x80) >> 7 ); delay_us(1); SCL(1); delay_us(5); SCL(0); delay_us(5); dat> 8); return 0; } /****************************************************************** * 函 數(shù) 名 稱(chēng):BMP180_Get_Temperature * 函 數(shù) 說(shuō) 明:讀取溫度單位℃ * 函 數(shù) 形 參:無(wú) * 函 數(shù) 返 回:溫度 * 作 者:LC * 備 注:無(wú) ******************************************************************/ float BMP180_Get_Temperature(void) { long UT = 0; long X1 = 0, X2 = 0; BMP180_Write_Cmd(0XF4, 0X2E); delay_ms(6); UT = BMP180_Read16(0xf6,2); X1 = ((long)UT - param.AC6) * param.AC5 / 32768.0; X2 = ((long)param.MC * 2048.0) / ( X1 + param.MD ); B5 = X1 + X2; return ((B5+8)/16.0)*0.1f; } /****************************************************************** * 函 數(shù) 名 稱(chēng):BMP180_Get_Pressure * 函 數(shù) 說(shuō) 明:讀取氣壓,單位Pa * 函 數(shù) 形 參:無(wú) * 函 數(shù) 返 回:當(dāng)前氣壓,單位Pa * 作 者:LC * 備 注:無(wú) ******************************************************************/ float BMP180_Get_Pressure(void) { long UP = 0; uint8_t oss = 0; long X1 = 0, X2 = 0; BMP180_Get_Temperature(); BMP180_Write_Cmd(0XF4, (0X34+(oss> 12) * param.B2 >> 11; X2 = param.AC2 * B6 >> 11; int32_t X3 = X1 + X2; int32_t B3 = (((param.AC1 > 2; X1 = param.AC3 * B6 >> 13; X2 = (B6 * B6 >> 12) * param.B1 >> 16; X3 = (X1 + X2 + 2) >> 2; uint32_t B4 = param.AC4 * (uint32_t)(X3 + 32768) >> 15; uint32_t B7 = ((uint32_t)UP - B3) * 50000; int32_t p; if(B7 < 0x80000000) { p = (B7 > 8) * (p >> 8); X1 = (X1 * 3038) >> 16; X2 = (-7375 * p) >> 16; p = p + ((X1 + X2 + 3791) >> 4); return p; } /****************************************************************** * 函 數(shù) 名 稱(chēng):BMP180_Get_Altitude * 函 數(shù) 說(shuō) 明:計(jì)算海拔高度 * 函 數(shù) 形 參:p=當(dāng)前氣壓 * 函 數(shù) 返 回:海拔高度 * 作 者:LC * 備 注:無(wú) ******************************************************************/ float BMP180_Get_Altitude(float p) { //#define PRESSURE_OF_SEA 101325.0f // 參考海平面壓強(qiáng) float altitude = 0; altitude = 44330*(1 - pow((p)/ 101325.0f, 1.0f / 5.255f)); // printf("altitude = %.2frn",altitude); return altitude; } /****************************************************************** * 函 數(shù) 名 稱(chēng):BMP180_Get_param * 函 數(shù) 說(shuō) 明:獲取出廠校準(zhǔn)值 * 函 數(shù) 形 參:無(wú) * 函 數(shù) 返 回:無(wú) * 作 者:LC * 備 注:無(wú) ******************************************************************/ void BMP180_Get_param(void) { param.AC1 = BMP180_Read16(0xaa,2); param.AC2 = BMP180_Read16(0xac,2); param.AC3 = BMP180_Read16(0xae,2); param.AC4 = BMP180_Read16(0xb0,2); param.AC5 = BMP180_Read16(0xb2,2); param.AC6 = BMP180_Read16(0xb4,2); param.B1 = BMP180_Read16(0xb6,2); param.B2 = BMP180_Read16(0xb8,2); param.MB = BMP180_Read16(0xba,2); param.MC = BMP180_Read16(0xbc,2); param.MD = BMP180_Read16(0xbe,2); }
在文件bsp_bmp180.h中,編寫(xiě)如下代碼。
/* * Change Logs: * Date Author Notes * 2024-06-20 LCKFB-LP first version */ #ifndef _BSP_BMP180_H_ #define _BSP_BMP180_H_ #include "board.h" //端口移植 #define RCC_BMP180_ENABLE() __RCC_GPIOB_CLK_ENABLE() #define PORT_BMP180 CW_GPIOB #define GPIO_SDA GPIO_PIN_9 #define GPIO_SCL GPIO_PIN_8 //設(shè)置SDA輸出模式 #define SDA_OUT() { GPIO_InitTypeDef GPIO_InitStruct; GPIO_InitStruct.Pins = GPIO_SDA; GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_OD; GPIO_InitStruct.Speed = GPIO_SPEED_HIGH; GPIO_Init(PORT_BMP180, &GPIO_InitStruct); } //設(shè)置SDA輸入模式 #define SDA_IN() { GPIO_InitTypeDef GPIO_InitStruct; GPIO_InitStruct.Pins = GPIO_SDA; GPIO_InitStruct.Mode = GPIO_MODE_INPUT; GPIO_InitStruct.Speed = GPIO_SPEED_HIGH; GPIO_Init(PORT_BMP180, &GPIO_InitStruct); } //獲取SDA引腳的電平變化 #define SDA_GET() GPIO_ReadPin(PORT_BMP180, GPIO_SDA) //SDA與SCL輸出 #define SDA(x) GPIO_WritePin(PORT_BMP180, GPIO_SDA, (x?GPIO_Pin_SET:GPIO_Pin_RESET) ) #define SCL(x) GPIO_WritePin(PORT_BMP180, GPIO_SCL, (x?GPIO_Pin_SET:GPIO_Pin_RESET) ) void BMP180_GPIO_Init(void); float BMP180_Get_Temperature(void); float BMP180_Get_Pressure(void); void BMP180_Write_Cmd(uint8_t regaddr,uint8_t cmd); void BMP180_Get_param(void); float BMP180_Get_Altitude(float p); #endif
四、移植驗(yàn)證
在自己工程中的main主函數(shù)中,編寫(xiě)如下。
/* * Change Logs: * Date Author Notes * 2024-06-20 LCKFB-LP first version */ #include "board.h" #include "stdio.h" #include "bsp_uart.h" #include "bsp_bmp180.h" int32_t main(void) { board_init(); // 開(kāi)發(fā)板初始化 uart1_init(115200); // 串口1波特率115200 BMP180_GPIO_Init(); BMP180_Get_param(); printf("startrn"); while(1) { printf("溫度 = %.2frn", BMP180_Get_Temperature() ); printf("氣壓 = %.2frn", BMP180_Get_Pressure() ); printf("海拔 = %.2frn", BMP180_Get_Altitude(BMP180_Get_Pressure()) ); printf("n"); delay_ms(1000); } }
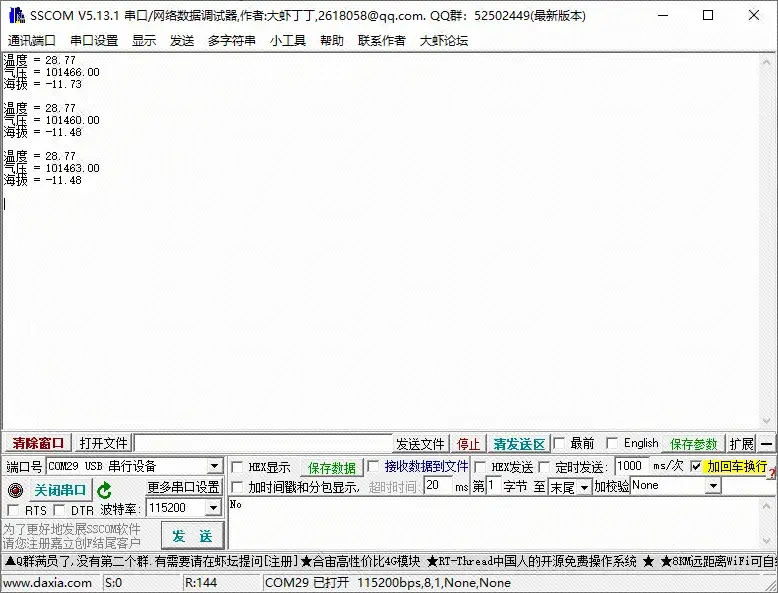
移植現(xiàn)象:每隔一秒左右測(cè)量一次溫度、氣壓和高度
模塊移植成功案例代碼:
鏈接:https://pan.baidu.com/s/1XigPjcZfrXBNn-wTb3S1KA?pwd=LCKF
提取碼:LCKF
審核編輯 黃宇
-
傳感器
+關(guān)注
關(guān)注
2562文章
52553瀏覽量
763646 -
CW32
+關(guān)注
關(guān)注
1文章
242瀏覽量
1093
發(fā)布評(píng)論請(qǐng)先 登錄
【CW32模塊使用】SGP30氣體傳感器
氣壓傳感器的分類(lèi)與應(yīng)用
CW32模塊使用 人體紅外傳感器

CW32模塊使用 MS5611氣壓傳感器
【CW32模塊使用】微波多普勒無(wú)線雷達(dá)傳感器

小型氣壓傳感器的應(yīng)用 工業(yè)氣壓傳感器的選購(gòu)技巧
氣壓傳感器選型指南 精密氣壓傳感器的優(yōu)勢(shì)
氣壓傳感器與溫度傳感器的區(qū)別
氣壓傳感器應(yīng)用領(lǐng)域分析 如何選擇氣壓傳感器
【CW32模塊使用】雨滴傳感器
基于CW32模塊的雨滴傳感器設(shè)計(jì)
基于CW32模塊的火焰傳感器設(shè)計(jì)
【CW32模塊使用】紅外測(cè)距傳感器

CW32模塊使用 指紋識(shí)別傳感器

CW32模塊使用 紅外循跡傳感器





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論