") 阿里首次出現(xiàn)在自動駕駛計算機(jī)視覺算法集KITTI道路場景分割排行榜上
阿里首次出現(xiàn)在自動駕駛計算機(jī)視覺算法集KITTI道路場景分割排行榜上

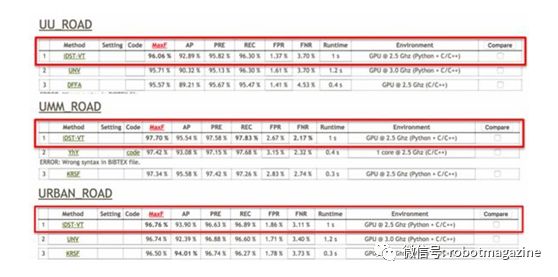
近日,阿里巴巴首次出現(xiàn)在自動駕駛計算機(jī)視覺算法集KITTI道路場景分割排行榜上。
榜單顯示,阿里人工智能團(tuán)隊iDST獲得三項分割任務(wù)第一,包括UU_ROAD(鄉(xiāng)村車道)與UMM_ROAD(多車道)兩項特定場景任務(wù),及整體場景的綜合評測任務(wù)URBAN_ROAD(城市車道)。
據(jù)悉,KITTI數(shù)據(jù)集由德國卡爾斯魯厄理工學(xué)院和豐田美國技術(shù)研究院聯(lián)合創(chuàng)辦,是國際公認(rèn)的最大自動駕駛計算機(jī)算法評測數(shù)據(jù)集。KITTI數(shù)據(jù)集涵蓋城市、住宅區(qū)、道路、校園、行人等五大場景,采用更適合自動駕駛的BEV(Bird’sEye View,鳥瞰)視角評價方式,包含眾多難度較大的無標(biāo)識線道路。
阿里獲三項分割任務(wù)第一
聲明:本文內(nèi)容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場。文章及其配圖僅供工程師學(xué)習(xí)之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問題,請聯(lián)系本站處理。
舉報投訴
-
人工智能
+關(guān)注
關(guān)注
1806文章
49014瀏覽量
249428 -
計算機(jī)視覺
+關(guān)注
關(guān)注
9文章
1709瀏覽量
46776 -
自動駕駛
+關(guān)注
關(guān)注
789文章
14318瀏覽量
170618 -
阿里
+關(guān)注
關(guān)注
6文章
454瀏覽量
33331
原文標(biāo)題:阿里視覺算法獲三項分割任務(wù)第一
文章出處:【微信號:robotmagazine,微信公眾號:機(jī)器人技術(shù)與應(yīng)用】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
熱點推薦
自動駕駛汽車如何正確進(jìn)行道路識別?
[首發(fā)于智駕最前沿微信公眾號]自動駕駛汽車在行駛過程中必須準(zhǔn)確識別道路環(huán)境,以便做出安全有效的決策,不同于人類開車,可以思考,自動駕駛汽車對于道路的識別需要更多的技術(shù)輔助。對于

卡車、礦車的自動駕駛和乘用車的自動駕駛在技術(shù)要求上有何不同?
,自動駕駛技術(shù)也得到了充足的應(yīng)用,但因應(yīng)用場景不同,技術(shù)的側(cè)重方向也有所區(qū)別。今天就來和大家聊一聊這個話題。 應(yīng)用場景:開放道路vs封閉場地 首先要理解的是,

自動駕駛安全基石:ODD
電子發(fā)燒友網(wǎng)綜合報道 自動駕駛ODD(Operational Design Domain)即設(shè)計運(yùn)行域,是指自動駕駛系統(tǒng)被設(shè)計為安全、有效運(yùn)行的具體條件范圍。它定義了自動駕駛汽車在哪些環(huán)境、場
新能源車軟件單元測試深度解析:自動駕駛系統(tǒng)視角
。
?自動駕駛軟件的特殊性?
? 感知層: ?激光雷達(dá)、攝像頭等傳感器數(shù)據(jù)處理算法的單元測試需覆蓋極端場景。例如,激光雷達(dá)點云濾波算法在雨雪天氣下的噪聲抑制能力需通過邊界測試驗證。某
發(fā)表于 05-12 15:59
自動駕駛規(guī)控算法驗證到底需要什么樣的場景仿真軟件?
ModelBase-AD憑借其優(yōu)秀的靜態(tài)場景模型、隨機(jī)交通流模型、整車動力學(xué)模型,為各大主機(jī)廠和供應(yīng)商提供了準(zhǔn)確的自動駕駛規(guī)控算法驗證仿真環(huán)境,提升了自動駕駛規(guī)控

2024年自動駕駛行業(yè)熱點技術(shù)盤點
感知輕地圖以及純視覺等。這些技術(shù)的出現(xiàn),也代表著自動駕駛正從概念走向現(xiàn)實,今天就給大家來盤點2024年自動駕駛行業(yè)出現(xiàn)的那些技術(shù)熱點! ?
自動駕駛技術(shù)的典型應(yīng)用 自動駕駛技術(shù)涉及到哪些技術(shù)
自動駕駛技術(shù)的典型應(yīng)用 自動駕駛技術(shù)是一種依賴計算機(jī)、無人駕駛設(shè)備以及各種傳感器,實現(xiàn)汽車自主行駛的技術(shù)。它通過使用人工智能、視覺
激光雷達(dá)與純視覺方案,哪個才是自動駕駛最優(yōu)選?
主要分為兩大類:激光雷達(dá)與視覺感知。激光雷達(dá)因其能夠提供精確的距離和形狀信息,在自動駕駛技術(shù)早期的開發(fā)中被廣泛應(yīng)用。然而,隨著計算機(jī)視覺技術(shù)的飛速進(jìn)步,基于攝像頭的純
NVIDIA Research端到端自動駕駛模型引領(lǐng)國際挑戰(zhàn)賽
NVIDIA 在國際計算機(jī)視覺與模式識別會議(CVPR)上展示了用于自動駕駛汽車開發(fā)的加速計算和生成式 AI 的突破技術(shù)。
計算機(jī)視覺有哪些優(yōu)缺點
計算機(jī)視覺作為人工智能領(lǐng)域的一個重要分支,旨在使計算機(jī)能夠像人類一樣理解和解釋圖像和視頻中的信息。這一技術(shù)的發(fā)展不僅推動了多個行業(yè)的變革,也帶來了諸多優(yōu)勢,但同時也伴隨著一些挑戰(zhàn)和局限性。以下是對
RISC-V適合什么樣的應(yīng)用場景
設(shè)計的理想工具,有助于培養(yǎng)更多的計算機(jī)專業(yè)人才。
綜上所述,RISC-V適合的應(yīng)用場景非常廣泛,包括物聯(lián)網(wǎng)、嵌入式系統(tǒng)、人工智能、自動駕駛、汽車電子、數(shù)據(jù)中心和云計算以及教育和研究等多
發(fā)表于 07-29 17:16
FPGA在自動駕駛領(lǐng)域有哪些優(yōu)勢?
可以根據(jù)自動駕駛系統(tǒng)的具體需求,通過編程來配置FPGA的邏輯功能和連接關(guān)系,以適應(yīng)不同的應(yīng)用場景和算法變化。這種靈活性使得FPGA能夠快速適應(yīng)自動駕駛技術(shù)的快速發(fā)展和變化。
低延遲:
發(fā)表于 07-29 17:11
FPGA在自動駕駛領(lǐng)域有哪些應(yīng)用?
是FPGA在自動駕駛領(lǐng)域的主要應(yīng)用:
一、感知算法加速
圖像處理:自動駕駛中需要通過攝像頭獲取并識別道路信息和行駛環(huán)境,這涉及到大量的圖像處理任務(wù)。FPGA在處理圖像上的運(yùn)算速度快,可
發(fā)表于 07-29 17:09
地平線科研論文入選國際計算機(jī)視覺頂會ECCV 2024
近日,地平線兩篇論文入選國際計算機(jī)視覺頂會ECCV 2024,自動駕駛算法技術(shù)再有新突破。

計算機(jī)視覺技術(shù)的AI算法模型
計算機(jī)視覺技術(shù)作為人工智能領(lǐng)域的一個重要分支,旨在使計算機(jī)能夠像人類一樣理解和解釋圖像及視頻中的信息。為了實現(xiàn)這一目標(biāo),計算機(jī)視覺技術(shù)依賴于





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論