") 自動駕駛規(guī)控算法驗證到底需要什么樣的場景仿真軟件?
自動駕駛規(guī)控算法驗證到底需要什么樣的場景仿真軟件?
隨著自動駕駛技術(shù)的不斷進(jìn)步,市場需求的持續(xù)增長,自動駕駛產(chǎn)業(yè)迎來廣闊的發(fā)展前景。L3及以上級別的自動駕駛技術(shù)有望逐步落地普及,為人們帶來更加安全、便捷、高效的出行體驗。
在自動駕駛技術(shù)落地之前,如何高效的進(jìn)行自動駕駛算法開發(fā)與驗證,是企業(yè)迫切需要解決的問題。同時規(guī)控算法作為自動駕駛算法的核心,其功能的好壞直接影響著乘客的安全性與舒適性,對規(guī)控算法的驗證顯得尤為重要。
自動駕駛規(guī)控算法驗證需求
自動駕駛算法可分為感知、規(guī)劃、決策、控制執(zhí)行四大模塊。規(guī)劃控制功能作為自動駕駛算法的核心,其主要目標(biāo)為:
- 從起點到終點規(guī)劃全局行駛路線,并在車輛行駛過程中,基于周圍環(huán)境,對局部軌跡進(jìn)行實時規(guī)劃
- 精準(zhǔn)控制自車按目標(biāo)軌跡行駛
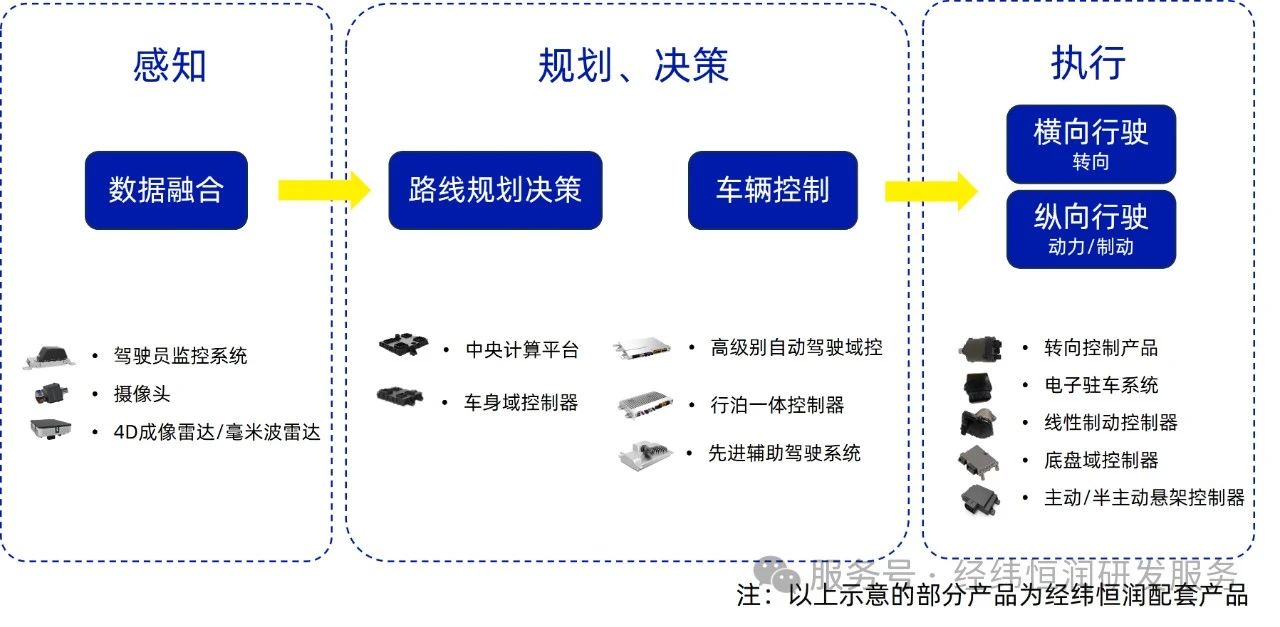
圖1 自動駕駛算法流程
自動駕駛規(guī)控算法通過接收傳感融合信息,避開障礙物,結(jié)合約束條件,規(guī)劃出兩點間一條最優(yōu)的路徑;然后由控制算法對自車的行駛軌跡進(jìn)行控制,從而實現(xiàn)車輛的自動行駛。
車輛軌跡的規(guī)劃控制是一個非常復(fù)雜的問題,一方面要考慮車輛自身的狀態(tài),另一方面還需要在行車過程中,考慮與其他車輛的博弈問題。通過獲取交通車的速度、加速度、橫擺角速度信息,預(yù)測交通車軌跡,實時調(diào)整自車的軌跡,保障自車行車的安全性與舒適性。
一個好的規(guī)控算法,需要反復(fù)驗證與迭代,才能給乘客提供更舒適、更安全的乘車體驗。行業(yè)公認(rèn)的測試驗證方法主要有兩種,一種是實車驗證,這種驗證方案準(zhǔn)確性較高,不過受限于路測條件,效率偏低且成本較高。另一種是仿真驗證,通過構(gòu)建一個虛擬仿真環(huán)境,利用數(shù)字化手段進(jìn)行驗證。仿真驗證由于其效率高、成本低,在自動駕駛行業(yè)獲得普遍認(rèn)可,其價值主要體現(xiàn)在以下幾個方面:
- 可通過仿真環(huán)境構(gòu)建大量極端場景,提高測試場景價值
- 可提供一個安全的驗證環(huán)境,降低犯錯成本
- 可隨機(jī)生成交通流,模擬復(fù)雜的交通車行為,驗證L3+自動駕駛算法
- 可通過仿真環(huán)境,重現(xiàn)功能失效場景,定位功能失效原因,實現(xiàn)算法優(yōu)化
- 可通過泛化大量場景,充分驗證算法的可靠性
場景仿真軟件介紹
實現(xiàn)規(guī)控算法的仿真驗證,需要一套完整的閉環(huán)解決方案,經(jīng)緯恒潤通過多年在仿真測試行業(yè)內(nèi)的積累,推出了成熟的SIL、HIL測試解決方案,在方案中采用經(jīng)緯恒潤自主研發(fā)的自動駕駛場景仿真軟件ModelBase-AD來滿足規(guī)控算法的閉環(huán)驗證需求。
ModelBase-AD軟件將自動駕駛算法仿真驗證需要的傳感器、道路、天氣、交通流、車輛動力學(xué)模型整合為一體,更便捷地進(jìn)行自動駕駛算法的驗證。
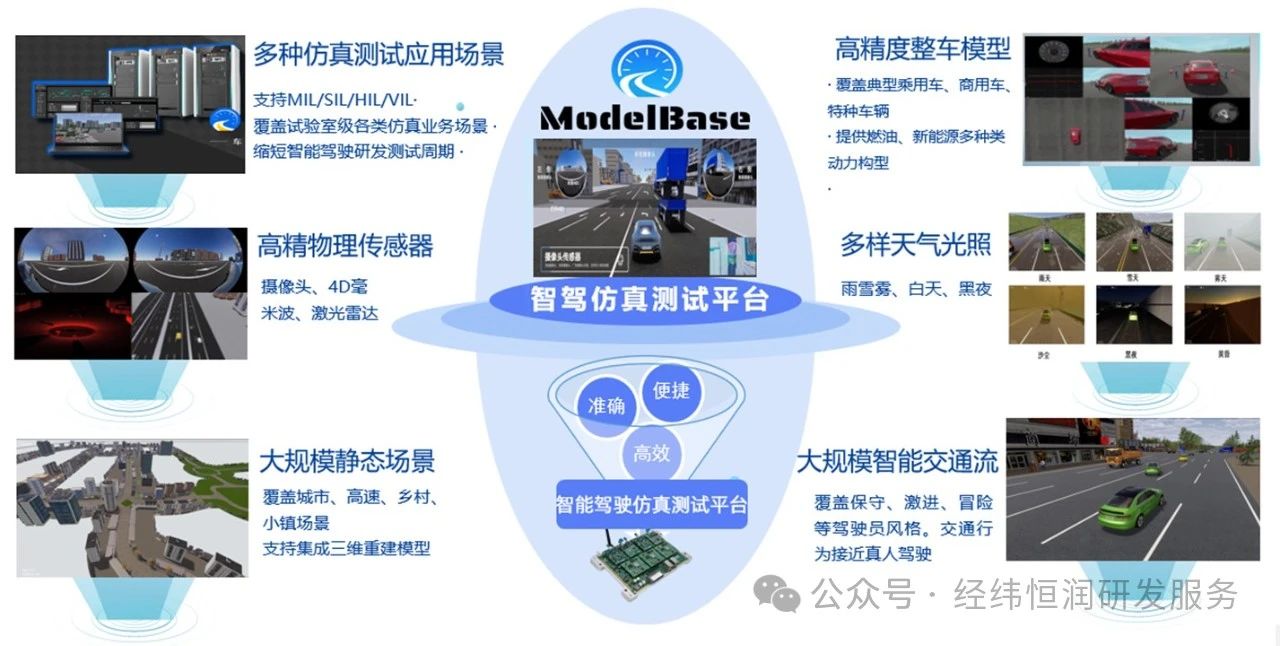
圖2 ModelBase-AD 軟件主要功能
規(guī)控算法主要基于道路、交通規(guī)則和交通障礙物信息的輸入,規(guī)劃自車行駛軌跡,并實時采集自車狀態(tài),輸出控制指令,保證自車按期望軌跡行駛。
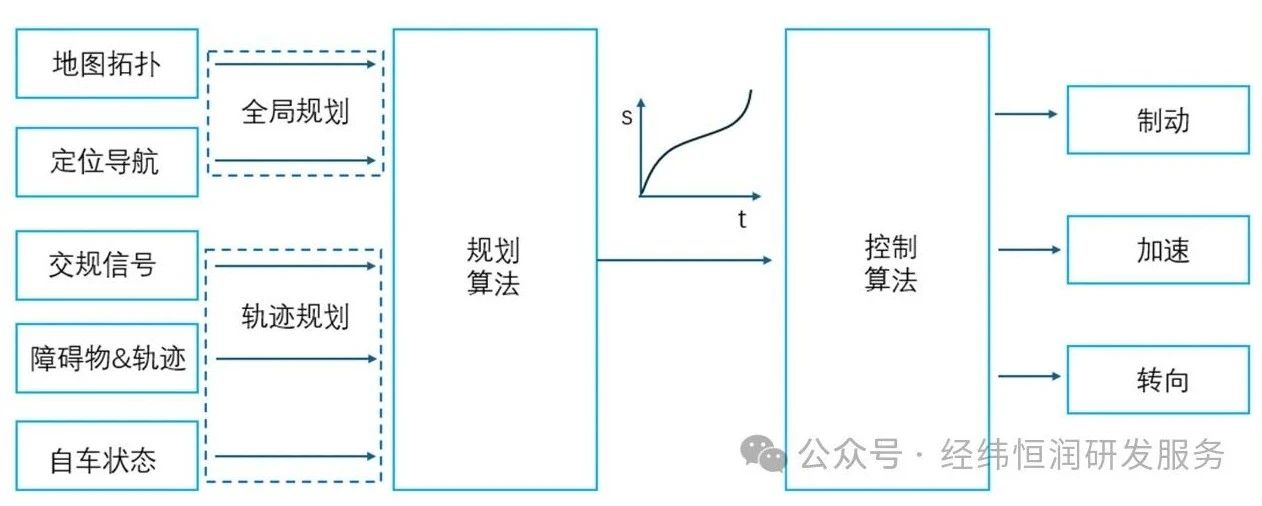
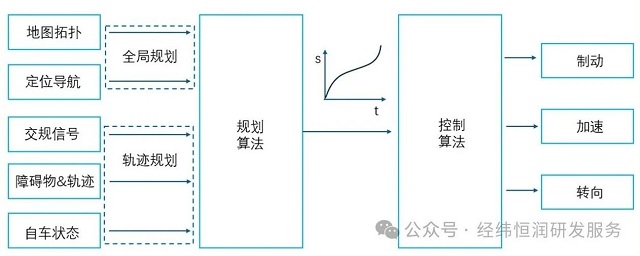
圖3 規(guī)劃控制算法接口信息
下面將從靜態(tài)場景模型、隨機(jī)交通流模型、車輛動力模型三個方面,詳細(xì)介紹ModelBase-AD是如何模擬算法的需求信息,并響應(yīng)算法的指令,實現(xiàn)車輛準(zhǔn)確行駛的。
- 靜態(tài)場景模型
ModelBase-AD靜態(tài)場景模型主要包括道路模型和交通資產(chǎn)模型兩大組成部分。道路模型基于OpenDRIVE標(biāo)準(zhǔn)開發(fā),軟件內(nèi)置了十多套道路模板,涵蓋城市路、鄉(xiāng)村路、高速路、雙車道、四車道、六車道、八車道等不同類型,用戶可以利用內(nèi)置的道路模板快,快速創(chuàng)建道路,實現(xiàn)復(fù)雜路網(wǎng)構(gòu)建。道路模型可覆蓋交叉路口、立交橋、橋梁、隧道、環(huán)島、坡道、閘道、收費站、停車場等道路元素。道路模型的路面摩擦系數(shù)可根據(jù)雨雪天氣自動適配,可以準(zhǔn)確的模擬車輛在雨雪天氣下的行駛狀態(tài)。
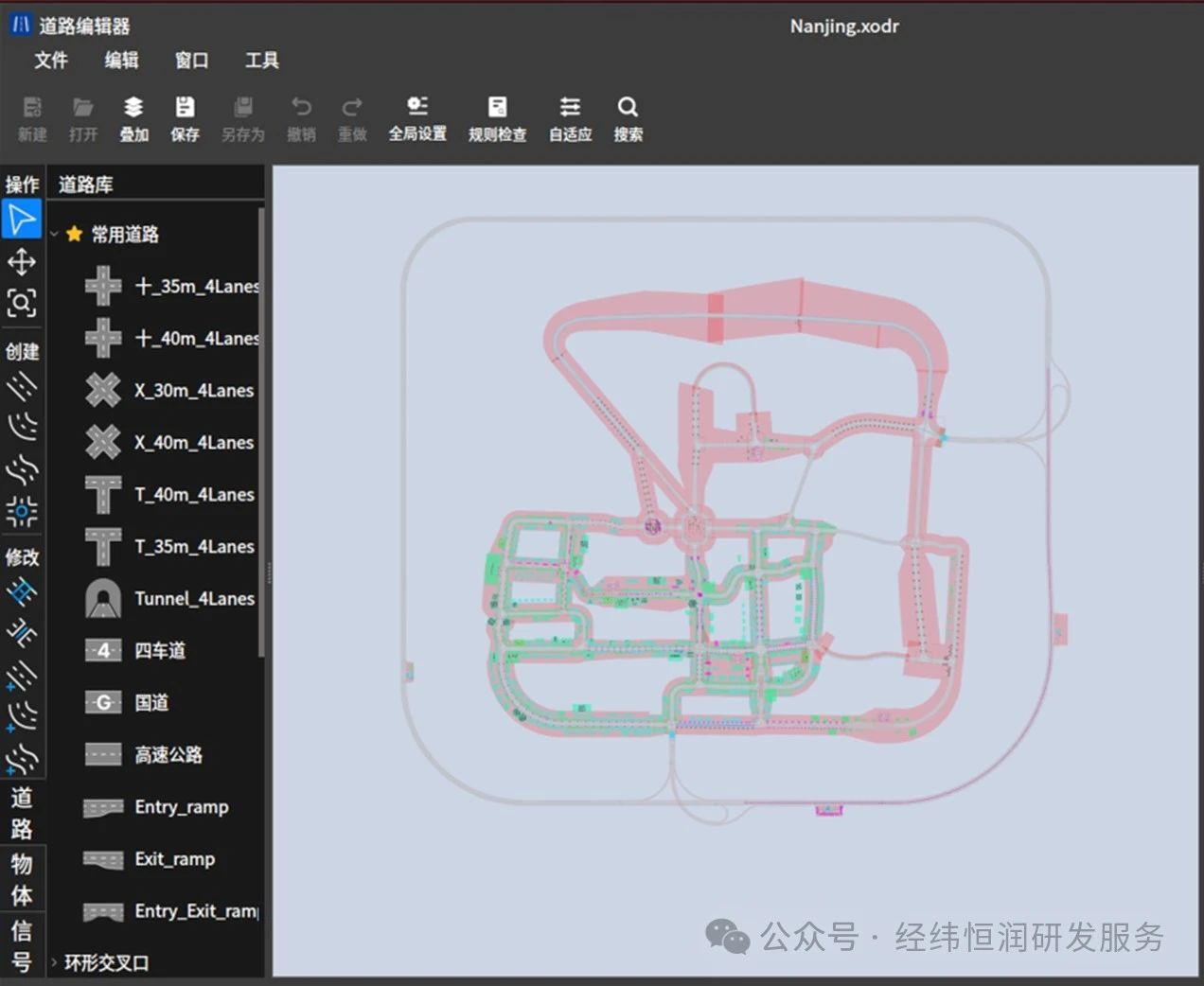
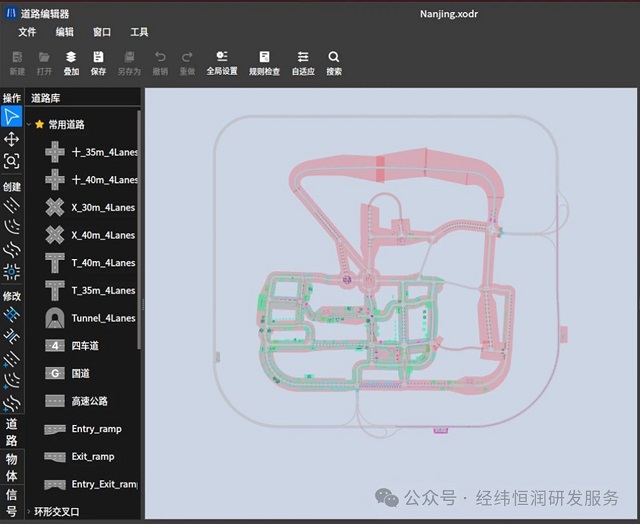
圖4 道路模型配置界面


圖5 整體靜態(tài)場景渲染效果


圖6 下雨路面效果
ModelBase-AD靜態(tài)場景模型內(nèi)置了大量的交通資產(chǎn)模型,包括路政設(shè)施、導(dǎo)流線、高速出入口標(biāo)識牌、交通燈、路燈、護(hù)欄、停車位、限速牌、路口提示牌、高速服務(wù)區(qū)提示牌等。可基于用戶對交通標(biāo)識的仿真需求,直接部署應(yīng)用,無需二次開發(fā)。

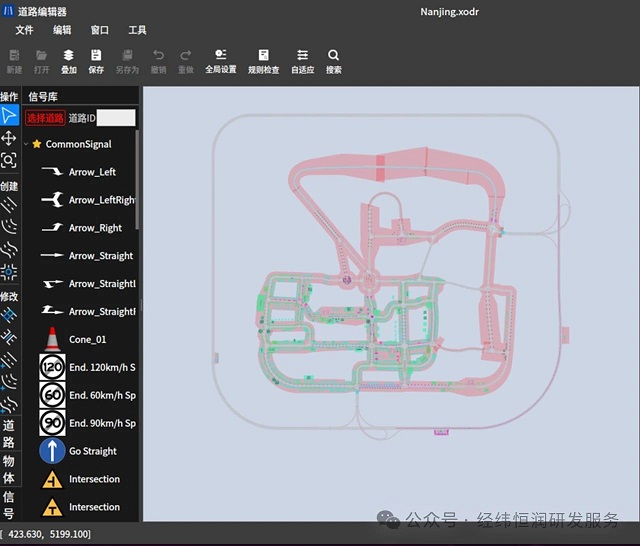
圖7 交通資產(chǎn)配置界面

圖8 交通資產(chǎn)模型展示
利用場景軟件中的道路模型庫和交通元素庫,可實現(xiàn)任意道路場景的搭建,充分覆蓋自動駕駛規(guī)控算法對靜態(tài)場景的需求。
- 隨機(jī)交通流模型
交通車輛的軌跡和駕駛風(fēng)格均影響著自動駕駛算法的實時軌跡規(guī)劃,準(zhǔn)確模擬出交通車的軌跡和駕駛風(fēng)格是規(guī)劃算法測試的核心需求。
為了將每輛交通車的行駛軌跡模擬準(zhǔn)確,ModelBase-AD采用 6自由度車身動力學(xué)模型來定義每一輛交通車,同時考慮了路面摩擦系數(shù)對交通車運動的影響,可準(zhǔn)確模擬出晴天、雨雪天氣下,交通車的行駛軌跡。
為了更有效地覆蓋交通車的駕駛風(fēng)格,ModelBase-AD定制了一套隨機(jī)交通流算法模型,將駕駛風(fēng)格細(xì)分為5種類型,分別為新手型、保守型、普通型、激進(jìn)型、冒險型。模型參數(shù)包括加速度、速度、道距離、換道時間、反應(yīng)時間、預(yù)瞄距離、視野距離、超車渴望度、是否遵守交通規(guī)則等。


圖9 隨機(jī)駕駛員參數(shù)配置
激進(jìn)型駕駛員風(fēng)格
保守型駕駛員風(fēng)格
ModelBase-AD通過隨機(jī)交通流算法、6自由度動力學(xué)模型、準(zhǔn)確的道路附著系數(shù),將場景軟件中交通車的行駛軌跡進(jìn)行了準(zhǔn)確描述,從而更準(zhǔn)確的實現(xiàn)了L3+自動駕駛規(guī)控算法驗證。
- 整車動力學(xué)模型
在規(guī)控算法模塊中,規(guī)劃算法輸出目標(biāo)軌跡給控制算法,控制算法基于自車當(dāng)前狀態(tài),實時解算出執(zhí)行器控制目標(biāo),并由執(zhí)行器驅(qū)動車輛行駛到目標(biāo)位置。在算法驗證過程中,整車動力學(xué)模型能否準(zhǔn)確表征真實車輛的姿態(tài)和行駛軌跡,是算法能否得到準(zhǔn)確驗證的核心影響因素。
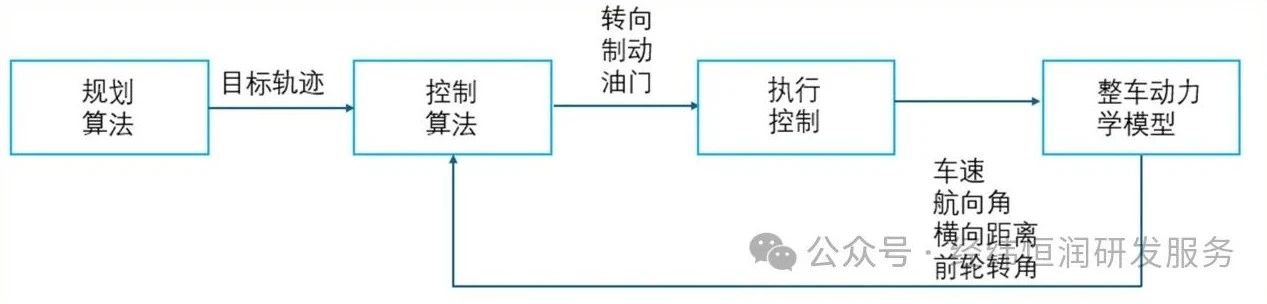
圖10 控制算法執(zhí)行流程
為了保證整車動力學(xué)模型能夠準(zhǔn)確表征實車的軌跡和姿態(tài)。ModelBase-AD軟件開發(fā)了30+自由度的整車動力學(xué)模型。除6自由度車身模型外,還包括動力系統(tǒng)模型、轉(zhuǎn)向系統(tǒng)模型、制動系統(tǒng)模型、懸架系統(tǒng)模型、輪胎系統(tǒng)模型。所有模型,均提供參數(shù)化接口,用戶可填入實車參數(shù),定義自己的專屬車輛模型。


圖11 車輛參數(shù)化界面
ModelBase-AD軟件還定義了一套標(biāo)準(zhǔn)的高精模型開發(fā)流程,采集標(biāo)準(zhǔn)工況下的實車數(shù)據(jù),訓(xùn)練模型的輸出結(jié)果,從而生成高精車輛動力學(xué)模型。


圖12 高精動力學(xué)模型生成流程
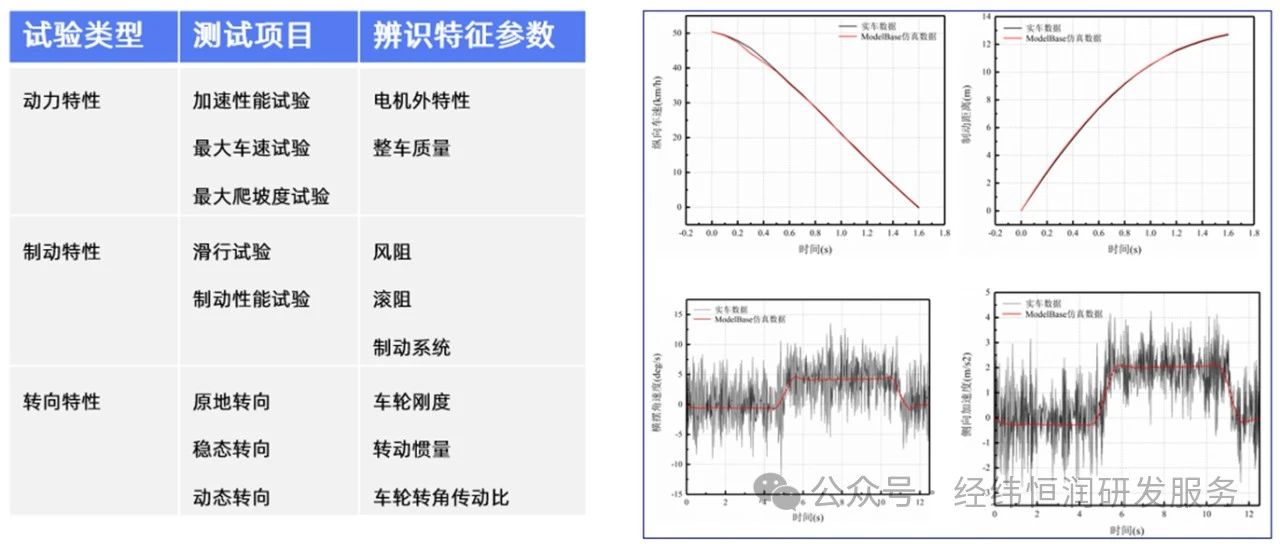
圖13 高精模型校準(zhǔn)效果展示
ModelBase-AD通過高精車輛動力學(xué)模型模擬自車的軌跡和姿態(tài),準(zhǔn)確表征自車的行駛狀態(tài),保障規(guī)控算法驗證更準(zhǔn)確。
總結(jié)
隨著自動駕駛電控技術(shù)的發(fā)展,傳統(tǒng)的規(guī)控算法正向著端到端大模型發(fā)展。雖然算法的內(nèi)核發(fā)生了變化,但算法的驗證需求不變,算法的輸入、輸出接口不變。ModelBase-AD憑借其優(yōu)秀的靜態(tài)場景模型、隨機(jī)交通流模型、整車動力學(xué)模型,為各大主機(jī)廠和供應(yīng)商提供了準(zhǔn)確的自動駕駛規(guī)控算法驗證仿真環(huán)境,提升了自動駕駛規(guī)控算法驗證效率。
-
仿真
+關(guān)注
關(guān)注
51文章
4234瀏覽量
135290 -
仿真軟件
+關(guān)注
關(guān)注
21文章
254瀏覽量
30875 -
自動駕駛
+關(guān)注
關(guān)注
788文章
14191瀏覽量
169452
發(fā)布評論請先 登錄
為什么仿真對于自動駕駛來說非常重要?

新能源車軟件單元測試深度解析:自動駕駛系統(tǒng)視角
技術(shù)分享 |多模態(tài)自動駕駛混合渲染HRMAD:將NeRF和3DGS進(jìn)行感知驗證和端到端AD測試

技術(shù)分享 | AVM合成數(shù)據(jù)仿真驗證方案


自動駕駛開發(fā)需要海量數(shù)據(jù),但真實數(shù)據(jù)難以覆蓋所有復(fù)雜場景,如何解決?# 自動駕駛# 仿真# #汽車電子
康謀分享 | 3DGS:革新自動駕駛仿真場景重建的關(guān)鍵技術(shù)

如何實現(xiàn)自動駕駛規(guī)控算法的仿真驗證

一文聊聊自動駕駛測試技術(shù)的挑戰(zhàn)與創(chuàng)新


基于場景的自動駕駛驗證策略


RISC-V適合什么樣的應(yīng)用場景
FPGA在自動駕駛領(lǐng)域有哪些優(yōu)勢?
FPGA在自動駕駛領(lǐng)域有哪些應(yīng)用?
自動駕駛仿真測試實踐:高精地圖仿真






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論