") FORT單元-不依賴GPS的步跟蹤定位穿戴設備@PNI
FORT單元-不依賴GPS的步跟蹤定位穿戴設備@PNI

歷史上,大多數(shù)基于傳感器的定位跟蹤系統(tǒng)一直受到從傳感器漂移到磁干擾和可靠性的問題的困擾,為了提供精確的位置數(shù)據(jù),現(xiàn)代基于傳感器的跟蹤系統(tǒng)必須克服這些問題,同時提供一個高精度、低功耗的傳感器模塊,隨時隨地提供精確的精度。新的FORT現(xiàn)場行動遠程跟蹤正是做到這一點。FORT應用最先進的技術(shù)來確定某點精確位置——即使GPS被破壞或拒絕。
FORT由PNI Sensor創(chuàng)建,是一種小型可穿戴設備,每行駛一公里可提供10米的位置精度,不使用GPS或射頻信標。在開發(fā)FORT改變游戲規(guī)則的技術(shù)時,PNI利用了多年的行業(yè)領先研究,在基于現(xiàn)實應用的基礎上進行精確定位、運動跟蹤和傳感器系統(tǒng)的融合,應用為可穿戴設備和智能手機開發(fā)的高精度、低功耗傳感器融合算法的學習,我們可以創(chuàng)建高精度的定位技術(shù)。
與早期的傳感器跟蹤器不同,F(xiàn)ORT的數(shù)據(jù)在時間的推移和廣泛的條件下保持準確,在任務關鍵的場景中提供精確的跟蹤數(shù)據(jù)。使用連續(xù)自適應導航算法(CAN),結(jié)合先進的磁強計(RM3100)、精密的陀螺儀、加速度計和邊緣人工智能,消除了傳感器漂移、磁干擾和磁異常.
PNI的Becky Oh解釋說:“FORT傳感器和算法可以跟蹤下馬士兵從最初的種子位置到20分鐘內(nèi)1%的位置精度,而無需任何額外的GPS、位置輸入或依賴基礎設施。”“例如,如果一名下馬的士兵在任何完全沒有g(shù)ps系統(tǒng)的環(huán)境下行駛1公里,部隊將能夠追蹤他們到10米的位置精度。”
FORT可以在室內(nèi)或室外工作,也可以進行現(xiàn)場配置,并易于與EUD(最終用戶設備)合并。通過使用能夠快速迭代、測試和部署的硬件平臺,F(xiàn)ORT可以輕松地與PNT和感知系統(tǒng)集成。FORT還解決了GPS的關鍵問題,減少了它在某些環(huán)境中可能暴露出來的漏洞。“從準確性、普遍性和成本的角度來看,GPS是驚人的,”Becky Oh說。“但從根本上說,它仍然是一種射頻技術(shù),這使得它天生脆弱,存在不可避免的可被沖突利用的漏洞。”
Becky Oh說:“PNI所使用的技術(shù)不僅確保了準確性,而且它還被設計成最小化重量和最大限度的便攜性,單人極限的載重量加起來可以超過68磅,在特殊情況中,這個重量可以高達120磅。因此,像FORT這樣只有35克重的低交換裝置(包括它內(nèi)部的可充電電池)對要求嚴苛的環(huán)境來說是有意義的。FORT通過利用手機中使用的陀螺儀、加速度計、壓力傳感器以及PNI傳感器更精確的磁強傳感器的創(chuàng)新,實現(xiàn)了這種低損耗。當然,這些傳感器是算法融合的,從這些傳感器的組合中提取性能,遠遠超過一個傳感器的性能。”

PNI開始為消費者市場開發(fā)被gps拒絕的跟蹤技術(shù),以實現(xiàn)基于位置的服務(LBS)。在那個應用程序中,這種跟蹤通常被稱為室內(nèi)導航(室內(nèi)沒有GPS)或脈沖多普勒雷達(PDR),它追蹤移動設備用戶的位置以進行營銷促銷,”O(jiān)h解釋說。“在這個實現(xiàn)中,PNI沒有直接訪問手機上的傳感器,而是通過安卓HAL(硬件抽象層),這不足以運行精確的傳感器融合。而且,我們也不能選擇移動設備的原生傳感器的質(zhì)量。這使得我們很難達到目前實現(xiàn)的準確性。FORT使用了一流的傳感器,我們對傳感器數(shù)據(jù)和應用于它們的算法有完全的控制。這項技術(shù)的不同之處在于,F(xiàn)ORT 是完全獨立的,不依賴于外部基礎設施,而不像手機經(jīng)常使用WiFi指紋、射頻信標數(shù)據(jù)和上下文信息。所有這些在民用環(huán)境中都很有用,但在某些特情下并不一定有用。“LBS并不是消費者市場上的關鍵任務服務"。
但在與gps競爭的環(huán)境中追蹤人員確實是關鍵的關鍵。在特情環(huán)境中,沒有額外的基礎設施,如WiFi指紋或射頻信標,因此,一個獨立的基于傳感器的跟蹤系統(tǒng),如FORT,可以作為一個關鍵的A-PNT(保證定位導航和定時)解決方案。”

人員在被GPS拒絕的環(huán)境中工作時,也已經(jīng)面臨著定位和導航方面的挑戰(zhàn),包括地下、水下、隧道、d建筑物,深深的峽谷和沉重的樹冠下。在這些情況下,F(xiàn)ORT也是一個極好的A-PNT解決方,它將不依賴GPS的精確定位精度與一個小型、輕便、易于使用的跟蹤器的結(jié)合,提高了可靠性。集合陀螺儀、加速度計和磁強計等慣性傳感器的慣性導航系統(tǒng),在歷史上一直被用于沒有GPS的導航的飛機和大型船只上,但它們的大小、重量和費用使它們不適合單人使用。”相比之下,傳統(tǒng)INS(慣性導航系統(tǒng))中使用的慣性傳感器很大,需要汽車電池來提供動力,而FORT使用PNI的微型手機MEMS慣性傳感器,且小于3 x 5 x 1.2厘米。FORT在現(xiàn)場的經(jīng)過證明的表現(xiàn),加上來自不同公司和機構(gòu)的評估,使得FORT傳感器目前被設計成一個特情EUD(最終用戶設備),作為GPS的補充品或替代品,PNI的FORT提供了無與倫比的位置、跟蹤信息和準確性——即使是在GPS被卡住、欺騙或拒絕的情況下。
PNI Sensor在過去7年里投資紅外研發(fā)公司開發(fā)慣性跟蹤算法,該算法僅使用消費者級MEMS慣性傳感器,并結(jié)合我們的高性能RM3100磁強計。因此,F(xiàn)ORT模塊(零件號pn14649)一個獨立的低SWaP-C跟蹤單元,可以佩戴身體,并在gps拒絕或妥協(xié)的環(huán)境中提供高分辨率、一步一步的跟蹤和定位。
FORT模塊可通過BLE與手機連續(xù)連接使用4小時。在使用2-3小時后,我們建議在進一步測試之前給模塊充電。
帶有CAN Eval iOS應用程序的堡壘將通過測試飛行提供,這可以在蘋果應用程序商店中找到。
FORT模塊使用3軸磁性傳感器,3軸陀螺儀和3軸加速度計進行慣性跟蹤(無需GPS)。陀螺儀偏差學習對于實現(xiàn)跟蹤精度非常重要,因此FORT模塊應該放置在一個穩(wěn)定的表面上,如在行走開始時至少30秒,每20分鐘步行一次,以允許陀螺偏差學習。
使用磁傳感器的自動陀螺偏置學習是該產(chǎn)品未來發(fā)布的技術(shù)發(fā)展之一。
將iPhone和模塊放置在足夠近的地方,以保持良好的、持續(xù)的藍牙連接。需要注意的是,隨著iPhone電池的耗盡,藍牙信號可能會變?nèi)酢_@可能需要將手機放在更靠近模塊的地方,以保持藍牙連接。
-
定位
+關注
關注
5文章
1443瀏覽量
35963 -
FORTE
+關注
關注
0文章
2瀏覽量
9022 -
穿戴設備
+關注
關注
2文章
104瀏覽量
32705
發(fā)布評論請先 登錄
自動駕駛汽車在隧道、山區(qū)如何精準定位?

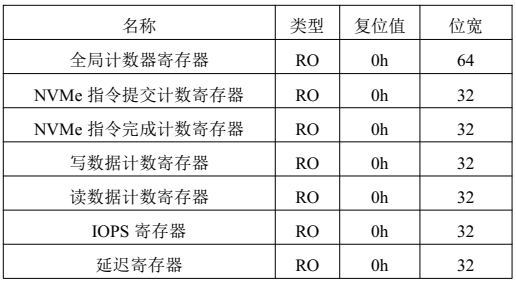
NVMe IP高速傳輸卻不依賴XDMA設計之六:性能監(jiān)測單元設計
NVMe IP高速傳輸卻不依賴XDMA設計之五:DMA 控制單元設計
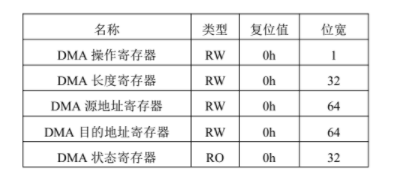
NVMe IP高速傳輸卻不依賴XDMA設計之五:DMA 控制單元設計
NVMe IP高速傳輸卻不依賴便利的XDMA設計之三:系統(tǒng)架構(gòu)
GPS對時設備,不依賴互聯(lián)網(wǎng)的"獨立時鐘"

谷歌地圖GPS定位
NVMe IP高速傳輸卻不依賴便利的XDMA設計之二
新品| 高精度GPS定位單元 GPS Unit v1.1 &amp; 高清顯示器驅(qū)動底座 Atomic Display Base






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論