") 步進(jìn)電機(jī)的驅(qū)動方法有哪些
步進(jìn)電機(jī)的驅(qū)動方法有哪些
一、引言
步進(jìn)電機(jī),作為一種將電脈沖信號轉(zhuǎn)換為角位移或線位移的開環(huán)控制元件,在現(xiàn)代工業(yè)自動化、精密測量、機(jī)器人技術(shù)等領(lǐng)域中扮演著舉足輕重的角色。步進(jìn)電機(jī)的驅(qū)動方法直接決定了其運(yùn)動精度、穩(wěn)定性和響應(yīng)速度。本文將詳細(xì)探討步進(jìn)電機(jī)的幾種主要驅(qū)動方法,并通過分點(diǎn)表示和歸納,力求為讀者提供清晰、全面的信息。
二、步進(jìn)電機(jī)驅(qū)動方法概述
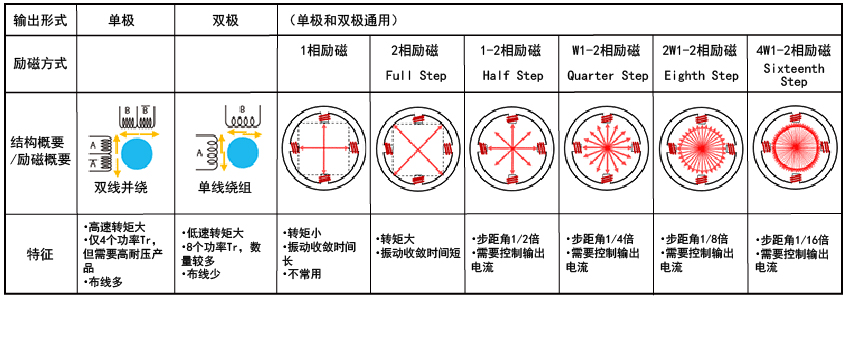
步進(jìn)電機(jī)的驅(qū)動方法主要包括全步進(jìn)驅(qū)動、半步進(jìn)驅(qū)動、微步進(jìn)驅(qū)動等。這些方法通過不同的電流控制策略,實(shí)現(xiàn)對步進(jìn)電機(jī)轉(zhuǎn)動角度和速度的精確控制。
三、全步進(jìn)驅(qū)動
定義與原理
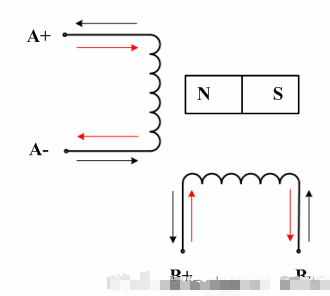
全步進(jìn)驅(qū)動是步進(jìn)電機(jī)最常見的驅(qū)動方式之一。它通過改變電流的方向和大小,使步進(jìn)電機(jī)按照設(shè)定的步距角進(jìn)行旋轉(zhuǎn)。全步進(jìn)驅(qū)動包括單相全步進(jìn)驅(qū)動和雙相全步進(jìn)驅(qū)動兩種形式。
單相全步進(jìn)驅(qū)動:在單相全步進(jìn)驅(qū)動中,通過向兩個(gè)相鄰線圈施加電流,使得步進(jìn)電機(jī)轉(zhuǎn)動一個(gè)步進(jìn)角度。該驅(qū)動方式簡單易實(shí)現(xiàn),但轉(zhuǎn)矩較小。
雙相全步進(jìn)驅(qū)動:雙相全步進(jìn)驅(qū)動是一種更為常見的驅(qū)動方式。它通過按照特定的順序向兩個(gè)線圈施加電流,實(shí)現(xiàn)步進(jìn)電機(jī)的轉(zhuǎn)動。這種驅(qū)動方式相比單相全步進(jìn)驅(qū)動具有更高的轉(zhuǎn)矩和更穩(wěn)定的運(yùn)行。
特點(diǎn)與應(yīng)用
全步進(jìn)驅(qū)動方式簡單直觀,適用于對轉(zhuǎn)矩要求不高的場合。由于其轉(zhuǎn)矩相對較小,因此在需要高精度定位和控制的場合中,可能需要結(jié)合其他驅(qū)動方式使用。
四、半步進(jìn)驅(qū)動
定義與原理
半步進(jìn)驅(qū)動是介于全步進(jìn)驅(qū)動和微步進(jìn)驅(qū)動之間的一種驅(qū)動方式。它通過改變電流的方向和大小,使步進(jìn)電機(jī)按照半個(gè)步距角進(jìn)行旋轉(zhuǎn)。半步進(jìn)驅(qū)動同樣包括單相和雙相兩種形式。
工作原理
在雙相半步進(jìn)驅(qū)動中,首先向一個(gè)線圈施加電流,使步進(jìn)電機(jī)轉(zhuǎn)動半個(gè)步進(jìn)角度;然后再向另一個(gè)線圈施加電流,使步進(jìn)電機(jī)再次轉(zhuǎn)動半個(gè)步進(jìn)角度。通過交替改變電流的方向和大小,可以實(shí)現(xiàn)精確的定位。
特點(diǎn)與應(yīng)用
半步進(jìn)驅(qū)動方式相比全步進(jìn)驅(qū)動方式具有更高的分辨率和更平滑的運(yùn)動。它適用于對定位要求較高的場合,如精密測量、機(jī)器人控制等。
五、微步進(jìn)驅(qū)動
定義與原理
微步進(jìn)驅(qū)動是步進(jìn)電機(jī)中最精細(xì)的驅(qū)動方式。它通過分段控制電流的大小和方向,使步進(jìn)電機(jī)按照更小的微步角度進(jìn)行旋轉(zhuǎn)。微步進(jìn)驅(qū)動可以實(shí)現(xiàn)更高的分辨率和更平滑的運(yùn)動。
工作原理
微步進(jìn)驅(qū)動將每個(gè)步進(jìn)角度細(xì)分為更小的微步角度。通過控制電流的大小和方向,可以使步進(jìn)電機(jī)按照微步角度進(jìn)行轉(zhuǎn)動。這種驅(qū)動方式在定位精度和運(yùn)動平穩(wěn)性方面優(yōu)于全步進(jìn)和半步進(jìn)驅(qū)動。
特點(diǎn)與應(yīng)用
微步進(jìn)驅(qū)動方式適用于對定位精度要求極高的場合,如高精密儀器、光學(xué)設(shè)備等。其高精度和平滑運(yùn)動的特性使得步進(jìn)電機(jī)在這些領(lǐng)域中得到了廣泛應(yīng)用。
六、其他驅(qū)動方法
除了上述三種主要的驅(qū)動方法外,步進(jìn)電機(jī)還有四拍驅(qū)動、八拍驅(qū)動等驅(qū)動方式。這些驅(qū)動方式通過改變電流的分配和時(shí)序,實(shí)現(xiàn)對步進(jìn)電機(jī)運(yùn)動狀態(tài)的精確控制。在實(shí)際應(yīng)用中,可以根據(jù)具體需求和條件選擇合適的驅(qū)動方法。
七、總結(jié)
本文詳細(xì)介紹了步進(jìn)電機(jī)的三種主要驅(qū)動方法:全步進(jìn)驅(qū)動、半步進(jìn)驅(qū)動和微步進(jìn)驅(qū)動。這些驅(qū)動方法通過不同的電流控制策略,實(shí)現(xiàn)對步進(jìn)電機(jī)轉(zhuǎn)動角度和速度的精確控制。在實(shí)際應(yīng)用中,應(yīng)根據(jù)具體需求和條件選擇合適的驅(qū)動方法,以確保步進(jìn)電機(jī)的正常運(yùn)行和精確控制。同時(shí),隨著技術(shù)的不斷發(fā)展,步進(jìn)電機(jī)的驅(qū)動方法也將不斷更新和完善,為工業(yè)自動化和精密控制領(lǐng)域帶來更多可能性。
-
線圈
+關(guān)注
關(guān)注
14文章
1844瀏覽量
45198 -
機(jī)器人
+關(guān)注
關(guān)注
213文章
29475瀏覽量
211529 -
步進(jìn)電機(jī)
+關(guān)注
關(guān)注
152文章
3156瀏覽量
149122
發(fā)布評論請先 登錄
步進(jìn)電機(jī)驅(qū)動相關(guān)的知識
步進(jìn)電機(jī)的驅(qū)動與控制的方法有哪些?
步進(jìn)電機(jī)的驅(qū)動技術(shù)
降低步進(jìn)電機(jī)振動、噪音的解決方法
步進(jìn)電機(jī)驅(qū)動器調(diào)速方法_步進(jìn)電機(jī)驅(qū)動器的作用
步進(jìn)電機(jī)的驅(qū)動方式與特征
步進(jìn)電機(jī)最簡單的驅(qū)動方法_步進(jìn)電機(jī)控制方法
步進(jìn)電機(jī)的雙極連接和單極連接驅(qū)動方法
步進(jìn)電機(jī)的驅(qū)動與控制 恒壓驅(qū)動 恒流驅(qū)動

步進(jìn)電機(jī)驅(qū)動器的主要驅(qū)動方式有哪些?

arduino如何驅(qū)動步進(jìn)電機(jī)
步進(jìn)電機(jī)驅(qū)動器撥碼開關(guān)的調(diào)節(jié)方法
步進(jìn)電機(jī)步進(jìn)驅(qū)動器計(jì)算方法
有刷電機(jī)和步進(jìn)電機(jī)電流調(diào)節(jié)的配置方法





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論