 行走的藝術 | 人形機器人:姿態篇
行走的藝術 | 人形機器人:姿態篇
在人形機器人的設計中,行動姿態的精準控制是實現高效、安全行走的關鍵。特別是在夜間室內和復雜的野外,機器人的行走不僅需要穩健,更要細心。多模態感知系統作為人形機器人姿態控制的關鍵技術之一,極大地提升了機器人的性能,使其能夠在復雜多變的環境中安全、有效地工作。隨著技術的不斷進步,多模態感知系統將在未來的人形機器人中扮演越來越重要的角色。
建立多模態感知系統
人形機器人的多模態感知系統,需要結合視覺、聽覺、嗅覺、觸覺、材質感知、壓力感知等多種“感官”,使其獲得立體而全面的環境認知。該系統與AI算法相結合,迅速處理來自傳感器的海量數據,形成機器人的“直覺”,使機器人能在瞬間作出科學合理的行走姿態決策,從而適應各種環境,且能在復雜多變的情況下保持穩健和靈活,無論是避開障礙還是規劃最佳路徑,都能輕松應對。
夜間室內行走的“魔法”:超聲波材質識別技術
設想一個場景,人形機器人在夜間的室內環境中執行安保任務。由于室內可能鋪設有各種不同的地面材質,如木地板、瓷磚或地毯,機器人需要能夠識別這些材質以避免損壞。如果它的足部裝配了超聲波材質識別傳感器,利用回波檢測技術,便能夠快速而準確地識別出地面的材質。結合機器人的主機算法,人形機器人能夠建立多模式并行的行走體系,無論是輕盈地在室內行走,還是穩健地踏過崎嶇的野外山海。
接下來,讓我們將視野拓寬到更為復雜的地形。想象機器人穿越沙地或冰面,這些地面與堅硬的水泥地截然不同,行走其上,人類容易失去平衡。但人形機器人,作為人類生產生活的得力助手,它的設計必須克服這些挑戰。超聲波材質識別傳感器在這些特殊環境中發揮著至關重要的作用。當機器人的腳步落在沙地或冰面上,傳感器立即將信息傳輸到中央控制系統,機器人隨即根據地面材質的特性,智能調節各處關節的力矩,巧妙地保持身軀的平衡。這樣,無論是輔助人類還是與動物一起,機器人都能安全地穿越那些難以行走的地方,展現出其作為智能伙伴的真正價值。
腳底下的“智慧”:柔性壓力傳感技術
在戶外探險中,人形機器人可能需要獨立或協助人類穿越森林、濕地等特殊地形地貌。野外的地面條件復雜多變,僅僅依靠視覺感知難以準確判斷地面情況。如在機器人的腳底板上安裝柔性壓力傳感器,能夠使其精準探測出腳底板所受的壓力,從而判斷地面的軟硬度。當機器人遇到沼澤地時,柔性壓力傳感器能夠立即識別出異常,并通過預警系統提醒人類同伴避免潛在的危險。
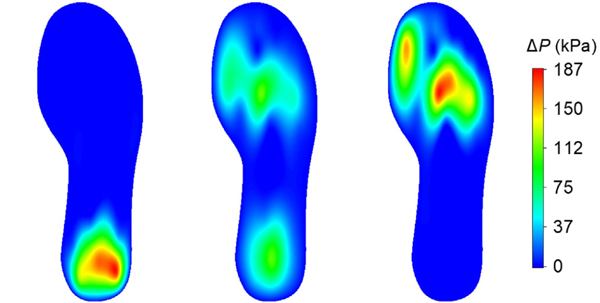
請暫且將視角轉向真人模仿實驗,實驗者的腳底安裝了五個柔性壓力傳感器。隨著實驗者行走,每一步的微妙力量變化都被這些傳感器逐一捕捉。如實驗成果印力圖呈現,可以看到從腳跟到腳尖,每一個區域所承受的壓力。設想一下,如在人形機器人的腳底板上安裝這款柔性壓力傳感器,那么機器人就能隨時感知到腳底各個區域的壓力分布情況,它能夠以前所未有的細致度感知地面的每一次接觸,再結合超聲波材質識別技術,機器人就能夠更加精準地調整自己的行走姿態,無論是在堅硬的大理石上,還是在柔軟的沙灘上,都能自在、自如。
-
機器人
+關注
關注
213文章
29475瀏覽量
211533 -
壓力傳感器
+關注
關注
35文章
2311瀏覽量
179974 -
柔性傳感器
+關注
關注
1文章
88瀏覽量
4348
發布評論請先 登錄
人形機器人感知革命!創新形態機器視覺傳感器涌現

人形機器人“造車”,車企扎堆布局!

從單芯片方案到多類型傳感,ADI賦能人形機器人創新

EtherCAT科普系列(4):EtherCAT技術在人形機器人靈巧手領域應用

短訊:全球首個!人形機器人技術新突破
伺服電動缸在人形機器人中的應用
全球巨頭加速布局人形機器人賽道
《人形機器人產業地圖(2024)》重磅發布!

眾擎機器人發布全尺寸人形機器人SE01
比亞迪工廠率先引入人形機器人

從市場角度簡要解讀“人形機器人”
從市場角度簡要解讀“人形機器人”






 工商網監
工商網監
評論