 SaberRD基于JMAG電機模型的電動汽車動力系統仿真(二)
SaberRD基于JMAG電機模型的電動汽車動力系統仿真(二)
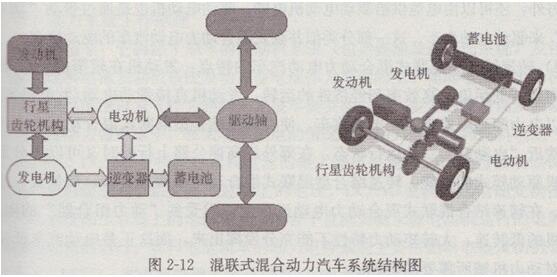
本文介紹了在不同抽象層次上有效模擬電動汽車動力系統的技術,仿真目標從駕駛周期數小時內的全局效率和熱分析,到逆變器開關特性和損耗的納秒細節。這些技術可以用來優化電機和逆變器控制,驗證電能質量(THD和損耗),并模擬故障。
本文分為兩部分,第一部分闡述電路設計思路以及在Saber RD中進行的選型與建模;第二部分闡述SaberRD基于JMAG電機模型搭建的四個不同抽象級別的電路以及在SaberRD中進行一系列的仿真驗證。
概述
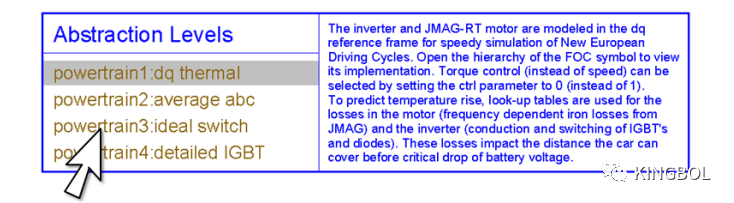
*電動汽車動力總成設計示例(從SaberRD開始頁面安裝)包含4個抽象級別,每個抽象級別都允許最有效地分析動力總成的特定行為。
*通過單擊導航符號上的屬性powertrain1到powertrain4,可以方便地瀏覽不同的抽象級別。
01
Powertrain 1:dq thermal
*powertrain1提供最大模擬速度,允許長時間模擬駕駛周期。在圖1中,正在重復新歐洲駕駛循環(NEDC),直到電池耗盡。相當于在60秒內模擬7個小時的駕駛。采用dq模型對電機和逆變器進行仿真,仿真速度快。dq模型(也稱為基頻模型)通過使用平均技術并僅保留相位和幅值信息,抽象了電壓的高頻開關性質和電流的正弦性質。這種抽象水平非常適合于研究長時間的熱效應。由于溫度升高和影響汽車在充電之間的距離,逆變器和電機的損耗在查找表中被準確地計算出來。
*電機和逆變器的損耗是頻率相關的(頻率是逆變器的開關頻率和電機的轉子速度)。逆變器的損耗取決于溫度,確保充分的電熱耦合。然而,此時在運動模型中不存在溫度依賴性。
*逆變器和電機產生的熱流提供一個簡化的熱網絡,連接到20°C環境溫度源。在全局變量下,電池組的溫度也設置為環境溫度20°C。圖1顯示了真實的速度、溫度和電池電壓在重復駕駛循環中的波形。模擬預測NEDC的射程為225公里,而制造商報告的射程為200公里。略微樂觀的預測的一種可能性是,仿真模型中的制動是100%再生的,沒有耗散成分。然而,事后看來,額外的車輛載重,有5名乘客被忽略了。考慮到這一點,實現的射程約為201公里。實際上,混合動力汽車動力系統的仿真模型或虛擬原型可以很好地預測實際性能。請注意,此初始測試假設新制造的電池組具有100%的額定容量。鋰離子電池從制造時就開始老化,所以這種退化也應該被考慮在內。
通過將暫態分析信號列表設置為All Signals(…: )并在vsi_dqx中繪制信號的瞬時效率,可以很容易地獲得電機和逆變器的瞬時效率。Vsi和jmag_pmsm_dqx.pmsm:fea_pmsm_dqx.pmsm。逆變器的平均效率為79%,電機的平均效率為85%。電機和逆變器信號以及車輛性能與電池組能量的關系可從Analyze_system_performance實驗中獲得。
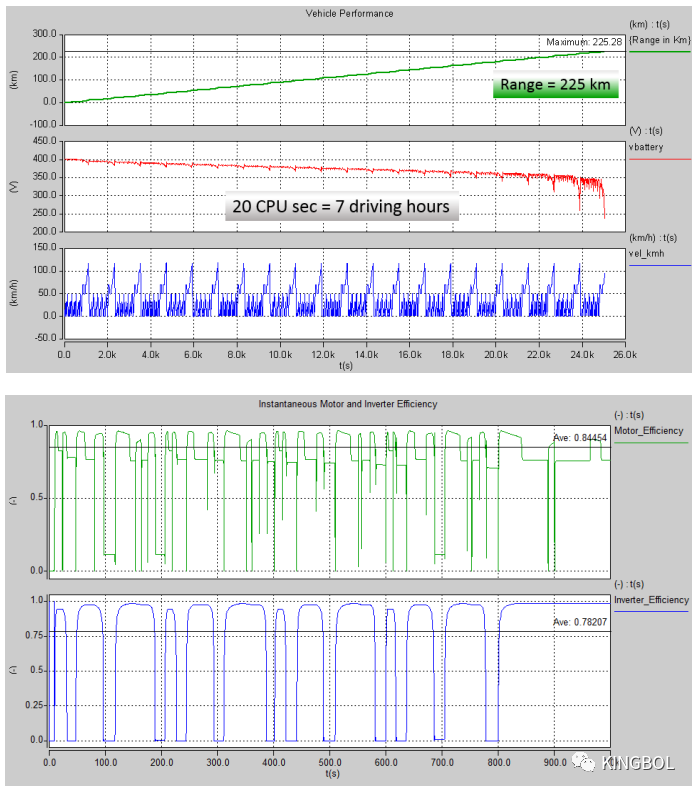
圖1 New European Driving Cycle仿真結果
*一級動力總成示例有一個“老化性能”實驗,可將電池組的溫度和年齡分布與系統的其他部分進行對比。這提供了一個假設,測試電池對系統性能和標稱的影響,但也包括壽命和溫度的高到低極端。實驗結果如圖2所示。要在SaberRD中運行該操作,用戶只需要在Simulate選項卡下選擇該實驗。一旦選擇并啟動,電池和車輛性能的模擬結果將自動提供。如圖3和4所示。
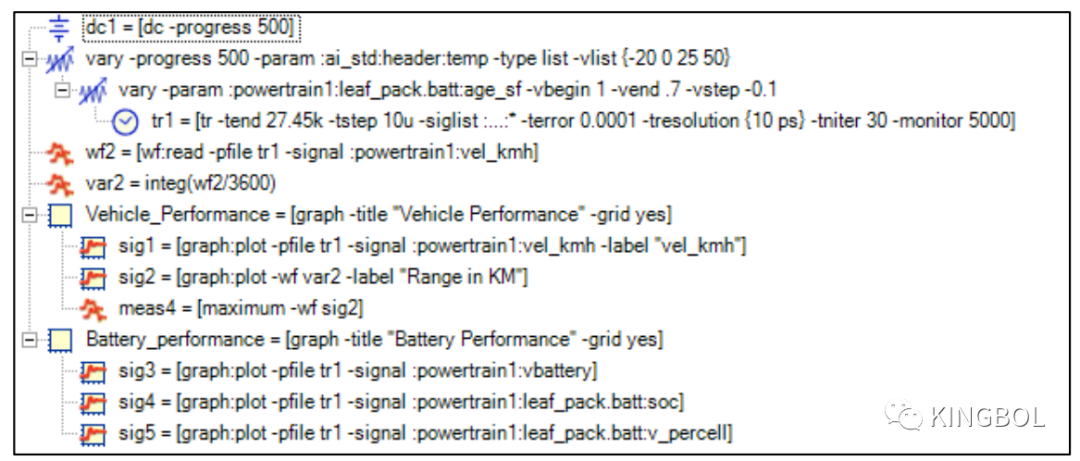
圖2 Battery pack temperature aging sweep experiment
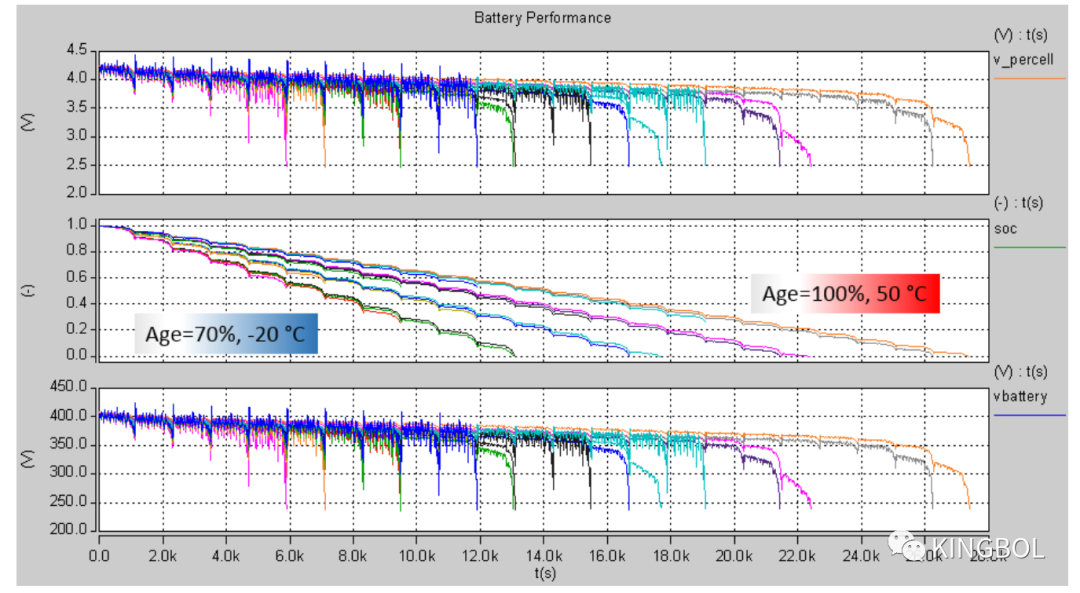
圖3 Battery pack performance simulation results
*電池壽命從100%(新電池)、90%、80%和70%進行掃描。圖3顯示了電池性能隨年齡和溫度的變化。例如,在高溫和標稱溫度下,分別為50°C和25°C,當SOC達到零時,電池組可以完全放電至完全耗盡。然而,當電池組溫度下降到0°C和-20°C時,可以利用的電池容量就少得多。
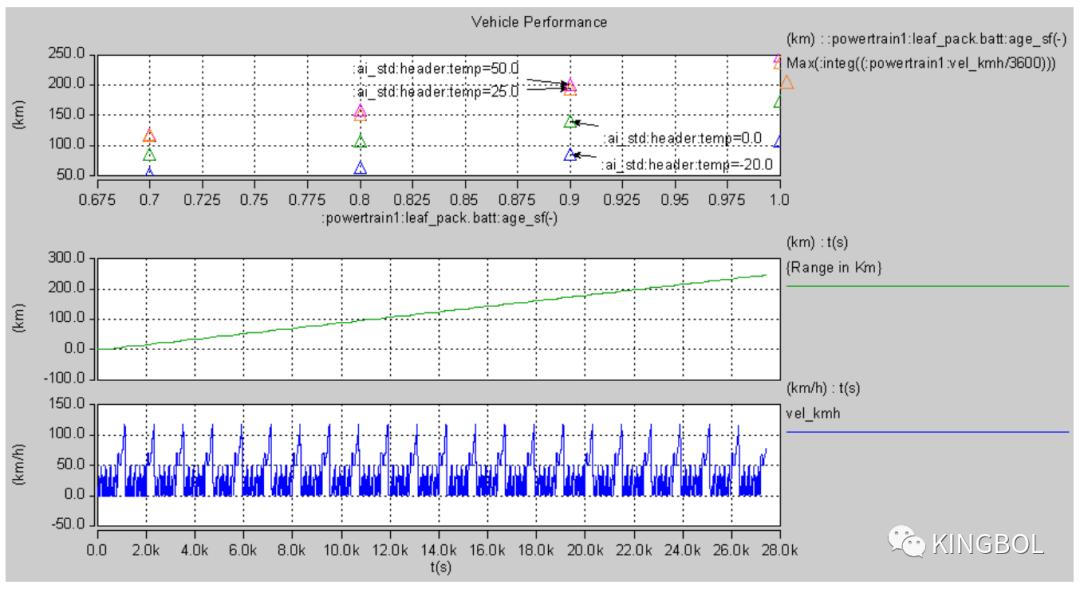
圖4 Vehicle performance simulation results
*圖4展示了給定新歐洲駕駛循環下電池壽命和溫度的車輛續航性能匯總。當電池包老化10%時,其容量約為原來的90%,在標稱溫度為25°C時,行程從175 Km下降到-20°C時的75 Km。這樣的研究對于有效地驗證一般性能是非常有益的,因為虛擬原型可以作為可執行的功能規格書。
02
Powertrain 2:average abc
*在powertrain2中,使用非開關三相逆變器(vsi_abc),在同步頻率產生正弦電壓,而不是在dq thermal(powertain 1)中產生直流電壓。模擬速度不如powertain1,因為沒有抽象重復正弦分量,但它明顯快于powertrain3,其中電壓是不連續的,脈寬是調制的。powertrain2提供了速度和精度之間的妥協,適合研究電機驅動的機電動力學。特別是,它允許觀察由電機的空間諧波引起的轉矩波動。圖5顯示了車輛在平坦地形上大約10秒內從0加速到60英里/小時。為了重現這些結果,將load_veh_dyn符號實例的terrain屬性設置為所有y值都相等(比如為0)。加載并運行Acceleration_Flat_Terrain實驗文件以重現圖5所示的結果。
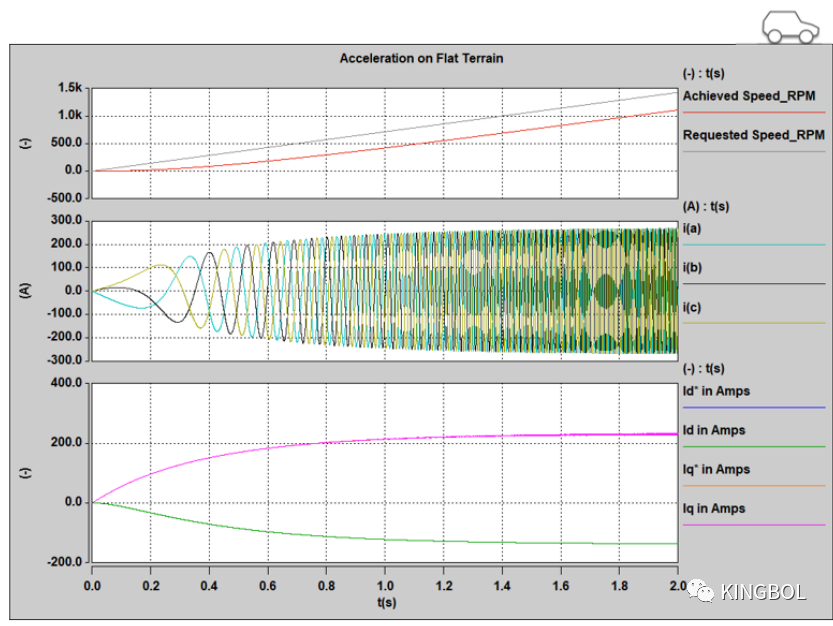
圖5 Acceleration on flat terrain
*不出所料,相電流的頻率與車速成正比,電流矢量的id分量為負,符合MTPA公式。
*圖6顯示了不同型號電機獲得的轉矩波形的細節。再現結果的實驗名為Torque_study。
*下面的列表的相關電機模型信息供設計師使用參考:
1.空間諧波精度模式下的JMAG模型
*將rttfile屬性設置為“100k_S_D_IV_WithUniformSpacing”
*設置精度屬性為sh
運行2秒的瞬態分析,將信號列表設置為:…: (所有信號)
*通過繪制信號來觀察齒槽轉矩:gear_box_w.gear_box_w1: trq_inp
2.JMAG模型在LdLq精度模式下
*設置精度屬性為Idlq
*運行2秒的瞬態分析并繪制圖:gear_box_w.gear_box_w1:trq_inp
3.原Saber LdLq PMSM型號(dq3pmsyn)
*將imag pmsm模型替換為dg3pmsyn(來自Saber庫),并更新以下屬性:rs = 10m;phi_max = 92;lq = 635 u;Id =271u, j=2.27e-2;p = 8
- 運行2秒的瞬態分析并繪制gear_box_w.gear_box_w1:trq_inp
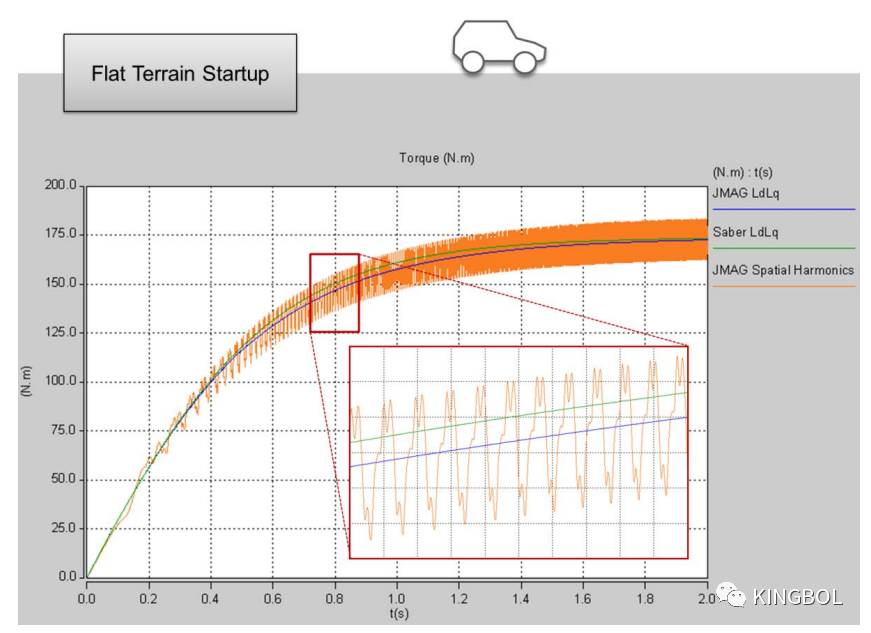 圖6 Detail of torque waveform
圖6 Detail of torque waveform
*圖7顯示,電機產生的反電動勢在t=5秒左右被鉗位到電池電壓上。超過這一點,電機在磁通減弱模式下運行,允許速度進一步提高,但需求速度與實現速度之間的不匹配越來越大。仿真還表明,電機電流在達到其最大額定值300A后得到適當的箝位。電流鉗位由MTPA塊(imax參數)完成。通過選擇并運行Flux_Weakening來驗證這一點。
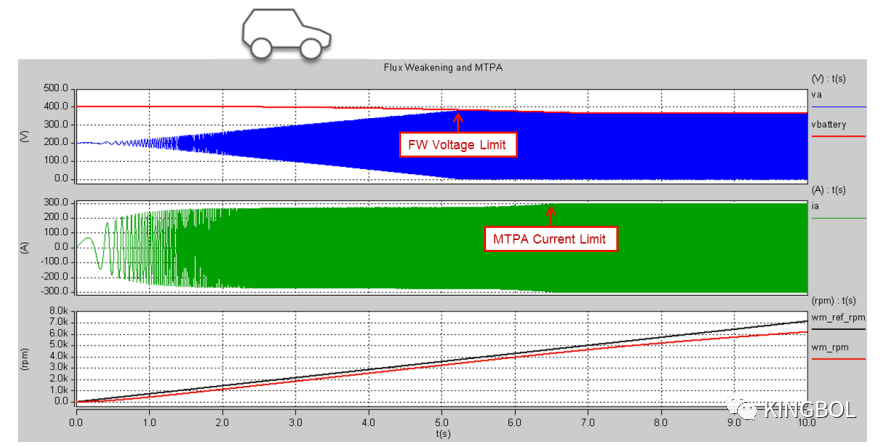
圖8 Flux weakening
*圖9和10顯示了車輛在斜坡地形上的動態。在下坡段,車速超過要求的速度:電機產生負轉矩,暫時充當發電機。此時,能量流回電池,從勢能轉換為動能,磁性,電和最終的化學形式。當轉矩過零時,相電流發生反轉。
*為了驗證這一點,運行名為Sloped_Terrain_Study的實驗,查看圖9和10所示的信號。
*值得指出的是,汽車的初始位置(x=0)必須是沒有呈現斜率的(車輛動力學符號的地形屬性中前兩點的y值相等)。為了獲得直流工作點的解,這是必要的。由于電機啟動時沒有轉速,因此不需要扭矩,因此只有在沒有重力(斜率=0)的情況下才能實現靜止時作用在汽車上的力的平衡。如果修改地形,需要確保在x=0處是平坦的。
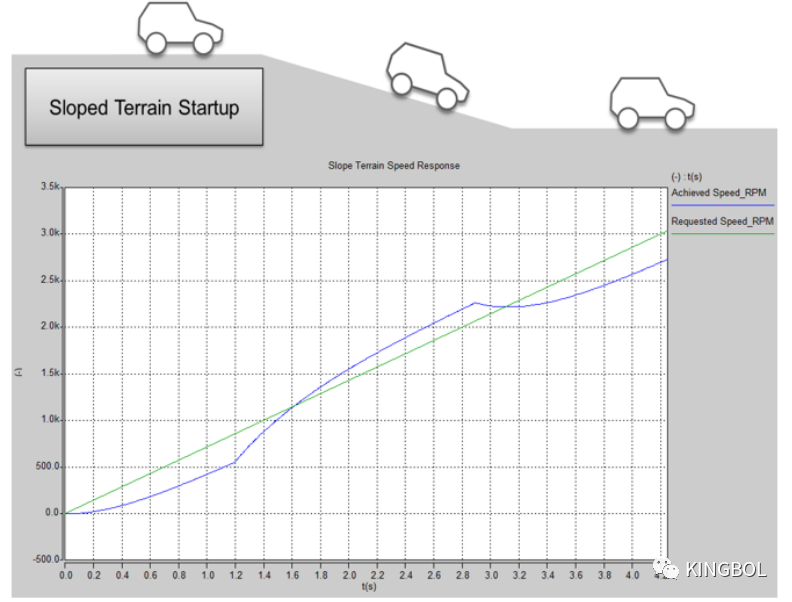
圖9 Speed response on sloped terrain
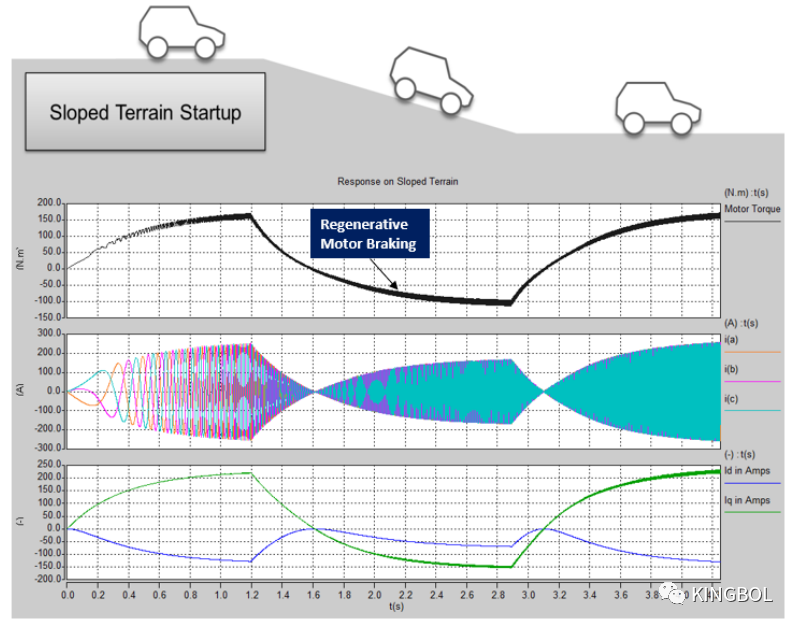
圖10 Torque and current responses on sloped terrain
03
Powertrain 3:ideal switch
*powertrain3包括逆變器的PWM操作,導致模擬速度較慢。然而,在這個級別中使用的開關模型(sw1_14_igbt.sin)比powertrain 4的詳細半導體模型模擬速度快大約一個數量級。
*sw1_14_igbt.sin是數字控制理想開關sw1_l4.sin與一個額外的反并行copack二極管和一個查找表方案,說明開關損耗。該模型還考慮了IGBT在開啟狀態下的壓降(參數von_igbt)。否則它就像二元電阻ron/roff。
*三種類型的開關損耗包括:IGBT的接通損耗、IGBT的關斷損耗和copack二極管的反向恢復損耗。這些損耗在文件中指定eon.ai_dat, eoff.ai_dat 和 err.ai_dat 都包含4列:通過導電開關的電流(安培)(在關斷/開斷事件之前/之后),通過阻塞開關的電壓(伏特)(在開斷/關斷事件之前/之后),開關溫度和與開關事件相關的損耗(焦耳)。
*自瞬態模擬開始以來,開關實例中耗散的總損耗(單位為焦耳)由信號total_dissipated_energy給出(在信號列表層次結構中選擇)。該信號對應switching_energy和傳導能量信號之和(要查看switching_energy,暫態分析設置Save process/shared variables需要設置為Yes)。
*信號pwrd表示在參數tau指定的一段時間內,開關中消耗的瞬時功率的平均值。
*開關損耗文件中的數據基于后來在powertrain4中使用的英飛凌IGBT FS600R07A2E3的數據表。為了避免查找表函數的異常,重要的是要包括已知損耗為零的點(即在零電壓或零電流條件下,開關能量為零)。
*可以導入開關損耗文件的內容,并在表查找(TLU)工具中查看,如圖11所示。
*在powertrain3中,控制是在MAST模板(foc_pmsm.sin)中實現的,使用采樣的輸入信號而不是前面級別的連續信號。此外,這種實現不輸出占空比,而是產生逆變器開關事件需要觸發的時間,使其更接近真正的MCU。盡管如此,大多數控制操作與powertrain2相同,包括Park和逆Park變換、MTPA、通量削弱、Pl積分和占空比計算。控制與設備之間的通信方案如圖12所示。
*默認情況下,采樣和開關頻率分別為30 kHz和5 kHz(控制和工廠之間的通信頻率)。每隔200us,從植物中采樣的信號被傳遞給控制,以計算下一個開關周期中的開關瞬間(在控制對植物的響應中,不可避免地存在一個周期的延遲)。
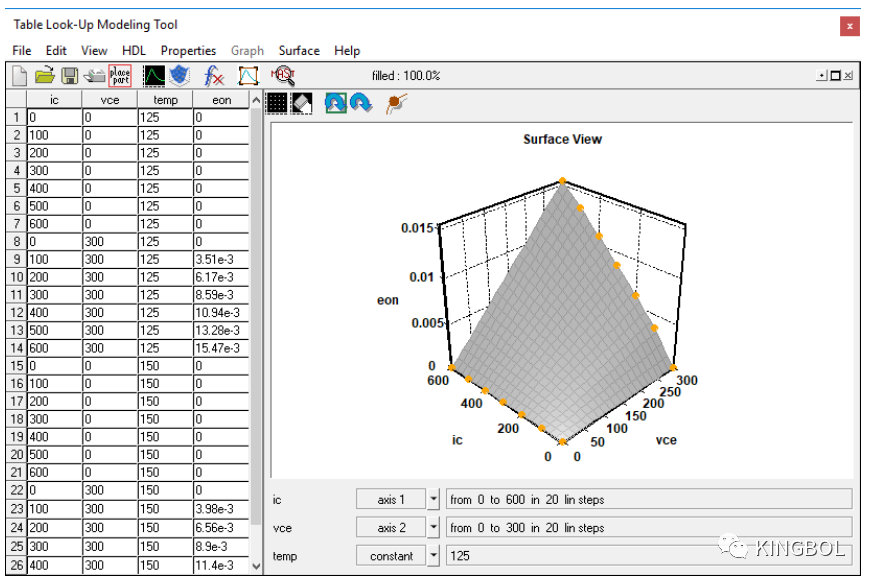
圖11 IGBT turn-on energy Eon viewed in the TLU tool
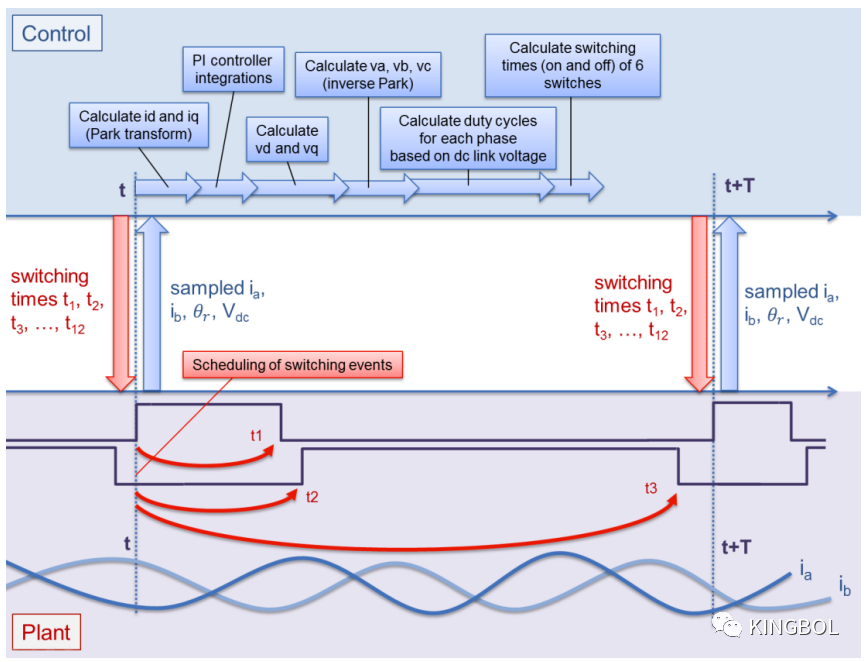
圖12 Communication scheme between plant and control in levels 3 and 4
*該控制不是通過異步中斷直接觸發開關,而是在每個開關周期開始時將12個開關時間傳遞給發電機(六個開關中的每個開關都有一個開啟時間和一個關閉時間)。當控件在外部的FPGA仿真器、Virtualizer或Simulink中運行時,該通信方案中使用的固定且相對較大的時間間隔(200us)顯著提高了聯合仿真性能。它允許切換事件在所需的時間間隔內觸發,沒有任何聯合仿真性能損耗。
*如果控制不是通過聯合仿真在外部運行(就像在安裝的powertrain3和powertrain4中的情況一樣),可以將控制接收和處理發電機信號的采樣頻率設置為高于開關頻率。較高的采樣頻率通常允許通過使用濾波器(如卡爾曼濾波器)來降低植物信號中的噪聲。開關頻率和采樣頻率是控制模型的參數(f_sampling和f_switching)。
*開關瞬間主要基于占空比,其本身基于電壓與直流鏈路電壓綜合的比值。此計算還考慮了用戶指定的死區時間。死區時間是插入兩個互補IGBT的關閉和打開之間的小間隔,以防止同時傳導和可能通過逆變器腿的災難性短路。死區時間一般在1us到5us之間。
*如圖13所示,如果不進行補償,死區時間導致電流波形失真,當相電流過零時(每個同步周期發生6次)尤其明顯。扭曲導致增加THD水平和鐵損失在電機。在高PWM頻率下,死區時間(固定且依賴于IGBT固有開關速度)占開關周期的較大部分,其影響會惡化。在低同步速度下,死區時間的影響也很明顯。為了驗證這一點,運行Ph_current_study實驗。
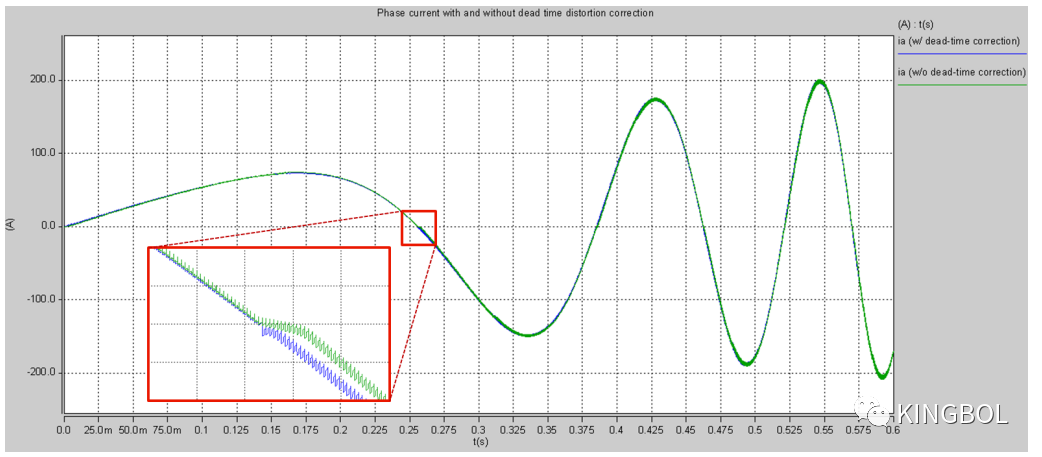
圖13 Corrected and uncorrected dead-time distortion
*通過根據電流的極性調整開關瞬時來糾正死區失真。當相同的leg IGBT都關閉時,相關相位的感應電流要么流過上部的自由輪二極管(電流進入leg),要么流過下部的自由輪二極管(電流離開leg)。由于leg電流的極性是提前已知的,因此可以預測有效相位電壓是將變為零還是變為直流鏈路電壓,從而導致占空比的有效增加或減少。
*值得注意的是,當同一支路上的兩個開關都被主動控制時,控制只關心死區時間,只有當支路電流接近零時才會發生死區時間。高于或低于一定的安全裕度(由FOC參數i_margin定義),對中只有一個開關是主動控制的(如果腿電流離開逆變器,則為上開關,否則為下開關)。非活動開關保持關閉狀態,當被控制開關關閉時,其反平行自由輪二極管處理電流。dt_comp參數設置為yes啟用死時間補償。i_margin參數對死區校正的質量沒有影響,只需要將該值設置為高于開關紋波電流大小即可正常工作。
04
Powertrain 4:detailed IGBT
*powertrain4提供了逆變器的最高級別的設計,但以模擬速度為代價:這個級別的模擬速度比前一個級別慢10倍左右。逆變器特性是使用基于英飛凌數據表(包含在設計示例安裝中)的IGBT工具完成的。通過打開逆變器的層次結構并單擊IGBT模型(包括反平行自由輪二極管)的工具屬性,可以在工具中重新跟蹤該特性的不同方面。
*powertrain4的控件是用C實現的,但在功能上等同于powertrain3的MAST實現。C代碼被稱為外部例程,可用于查看和編輯(foc_pmsm.c)。編譯和鏈接指令如下:

*其中SABER_HOME需要替換為SaberRD安裝的路徑。
*transient_analysis實驗可以選擇和運行,以方便地檢查IGBT的啟動行為和在詳細的逆變器實現下產生的電機電壓和電流。參見圖28和圖29。
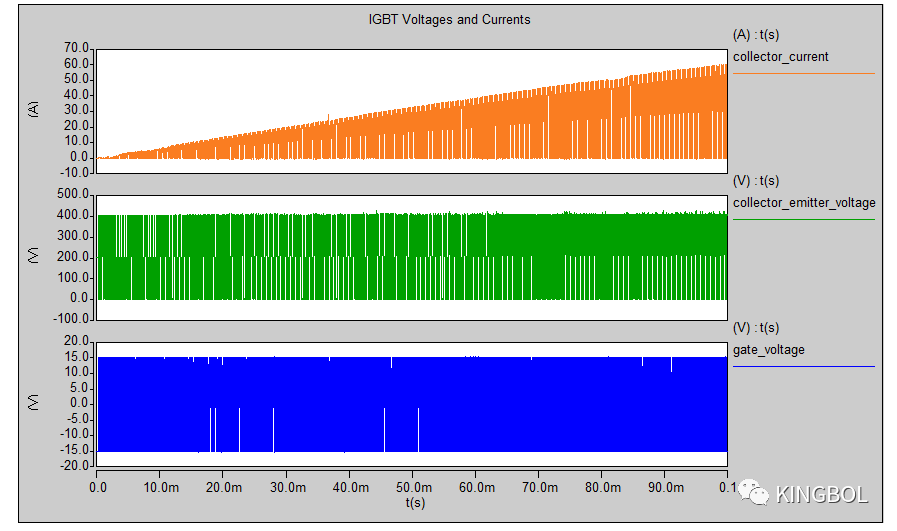
圖14 IGBT Voltages and Currents
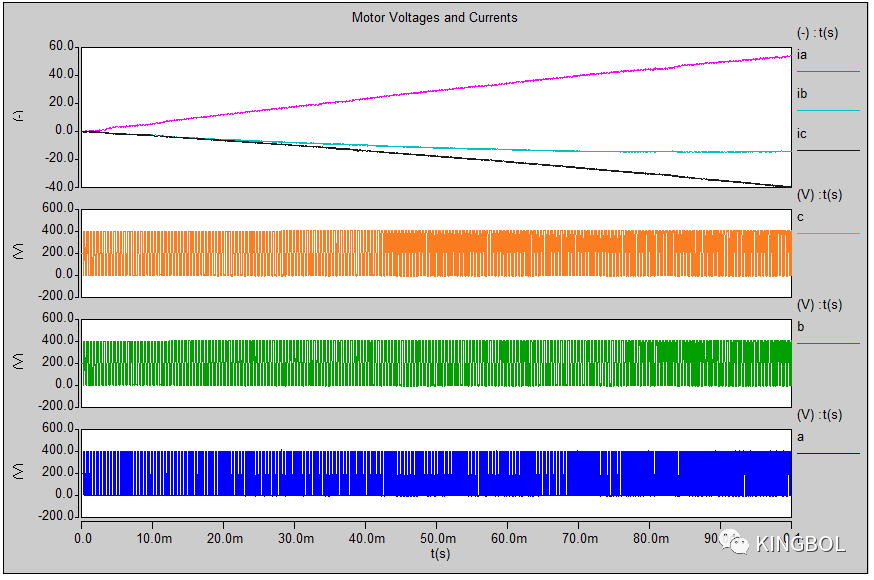
圖15 Motor Voltages and Currents
05
總結
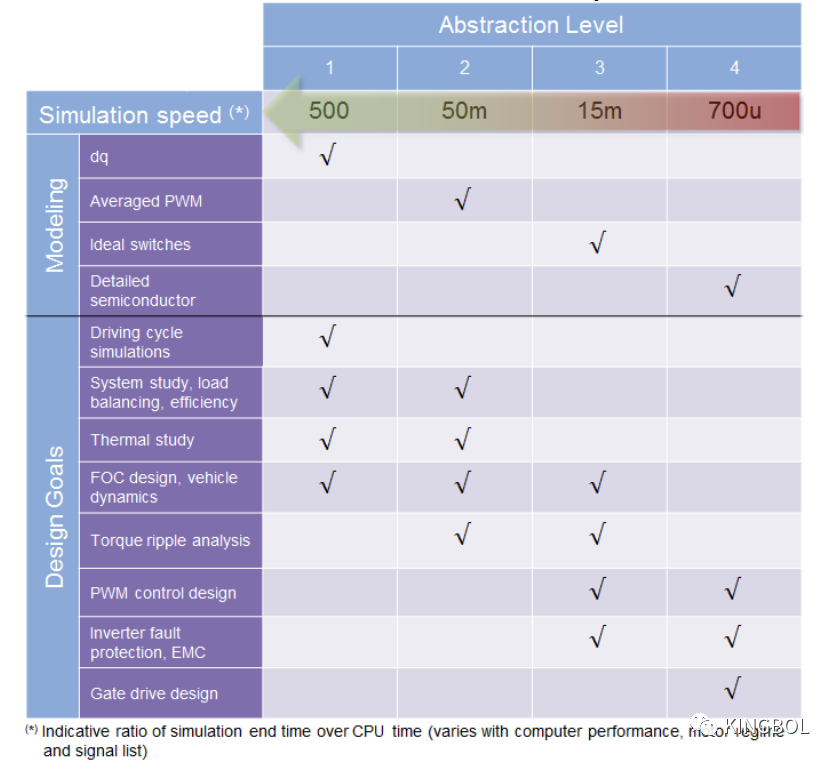
一些建模技術已經證明,提供仿真速度與精度的權衡適當的電機驅動設計的不同階段。下表總結了這些技術。
*dq模型提供了最高的仿真速度,以有效地模擬駕駛循環,評估整體系統效率,評估負載平衡或電池管理策略,并分析長時間內發展的熱方面。
*逆變器的平均PWM模型適用于優化電機控制(FOC或DTC)和分析驅動動態,包括電機缺陷引起的轉矩波動和振動。
*理想的開關模型是實用的,以評估PWM替代品(如正弦或空間矢量)和故障保護策略(保險絲,冗余逆變器等)。
*詳細的半導體模型對于評估逆變器應力(最大dl/dt和dV/dt,電壓和電流峰值),設計柵極驅動器以獲得最佳的開關速度和死區時間,以及確定緩沖元件的尺寸是必要的。此級別的建模對于生成支持更高級別抽象的損耗也是必要的。
-
電動汽車
+關注
關注
156文章
12371瀏覽量
234099 -
鋰離子電池
+關注
關注
85文章
3319瀏覽量
78708 -
電機控制
+關注
關注
3567文章
1948瀏覽量
271208 -
逆變器
+關注
關注
293文章
4857瀏覽量
210051 -
JMAG
+關注
關注
0文章
6瀏覽量
12741
發布評論請先 登錄
SaberRD基于JMAG電機模型的電動汽車動力系統仿真(一)
汽車動力系統技術大盤點
汽車動力系統大盤點:助你設計絕佳方案
電動汽車的高性能運行離不開這項試驗
電動汽車電池動力系統銅絞線軟連接
原理 - 動力系統-電機控制器MCU與驅動電機
ISG型客車混合動力系統的仿真

福特純電動汽車F150渲染圖曝光該車動力系統進行了新的設計
純電動汽車動力系統選型匹配與仿真
EV4000新能源汽車動力系統綜合測試儀






 工商網監
工商網監
評論