 機器人時間縮放法原理
機器人時間縮放法原理
時間縮放法的初衷是用于修改軌跡,避免軌跡違反系統飽和約束限制的,我們先闡述其原理,然后將其用于實現速度曲線時間同步。
在一些應用場景中需要考慮驅動系統的飽和限制約束,為了保證規劃的期望軌跡不違反此類飽和限制,必須對原始的軌跡進行修改。
由于那些運動速度、加速度和力矩超過允許范圍的運動軌跡在實際中無法執行,因此此類運動軌跡在實際工程中應予以避免。實際中可以將飽和區分為如下兩類。
(1)運動學飽和:規劃后軌跡的速度或加速度超過了驅動系統所能實現的臨界速度或臨界加速度。
(2)動力學飽和:此列飽和發生于驅動系統所需的驅動力矩(超過驅動系統所能提供的臨界力矩)不可行的情形。
特別地,由于多機械系統動力學的非線性耦合性,動力學飽和現象往往出現于此類多軸機械系統(如工業機器人)中。
如果在軌跡規劃階段并未提前考慮上述運動學飽和及動力學飽和限制,那么有必要在系統跟蹤運動軌跡之前驗證運動軌跡的可行性,并采取必要措施(如增加軌跡的時間長度)來防止違反上述飽和限制。
首先,給定一條軌跡:
q=q(t)
接下來引入一個新的與時間t有關的時間變量′t′ 可使得上面軌跡變快或變慢,或者更一般地,可以修改軌跡的速度和加速度等,其中 t和
′t′之間具有如下嚴格的函數關系:
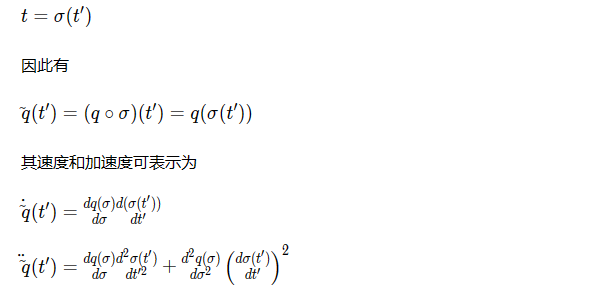

為了簡便起見,上述關系可以重新寫成如下形式:


聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
機器人
+關注
關注
213文章
29538瀏覽量
211793 -
軌跡
+關注
關注
0文章
46瀏覽量
9438 -
機械系統
+關注
關注
0文章
64瀏覽量
9832
發布評論請先 登錄
相關推薦
熱點推薦
機器人時代將來臨,誰的飯碗已“告急”?
人工智能技術、大數據技術和云計算技術正在爭取突破,在剛剛過去的2016中國機器人大賽上,匯聚了國內外100余家知名機器人及智能裝備企業和國內1200個機器人團隊,奇思妙想的激烈碰撞,越來越多的
發表于 11-01 10:08
?558次閱讀
機器人時代到來臨——操控人才在何方?
機器人相關技術人才缺口超過2000人。看到這個數據,倪炬就忍不住想“感言”:機器人時代來了,我們的時代,也來了! 但是,巨大的人才缺口誰來彌補?如何彌補?很多高職院校已經躍躍欲試,甚至聯合成立了全國工業
發表于 03-02 11:21
機器人與未來
劉***:歡迎來到未來機器人的世界,在這里一些關于機器人及未來的傳統認識將被顛覆。創造機器人曾是我們兒時的夢想,從敲打簡陋的鐵皮機器人,到憧憬科幻小電影里的超酷
發表于 12-29 14:56
華碩Zenbo,機器人時代來了?
可愛的機器人。其流暢的語言,豐富的表情,智能的對話,而且還能跟著人走動,就像家里的寵物,迅速的引起了社會各界對服務型機器人的關注。 筆者不禁要問機器人時代就要來臨了么?這么酷炫,這么科幻
發表于 06-06 21:10
身處“機器人時代”,我們該如何相處?
。 雖然機器人已經主導了互聯網流量,但這可能只是“機器人時代”的開始。馬云說,“在過去的二三十年,我們把人變成了機器,在流水線上特別明顯;未來的二三十年我們將會把機器人變成人,
發表于 06-20 15:18
選購工業機器人要了解哪些技術參數?
現如今工業機器人的種類非常多,從材料搬運到機器維護,從焊接到切割。工業機器人制造商開發了適用于各種應用的機器人產品。由于種類繁多,很多客戶購買工業機
發表于 08-26 10:37
已開獎——【送書福利】機器人時代已來!送你幾本機器人學硬核好書
`21世紀是機器人的時代。從學術研究到工程應用,機器人引起了學界和工業界越來越多的關注和興趣。這種日益濃厚的興趣也來源于機器人學作為一門綜合性學科的多學科交叉特征,后者是創新的源泉,給社會發展帶來
發表于 11-16 16:14
SCARA工業機器人相關資料推薦
ZNL-406SCARA工業機器人一、概述ZNL-406SCARA工業機器人可以在高速運行時承擔較高負載,非常適用于需要更大工作范圍或更高有效負載同時擁高速度、低價格的應用。機器人時重物取放、包裝
發表于 07-01 09:49
abb機器人電源模塊短路板短路故障處理
使用機器人時間的增長,機器人電路板上的元器件就會自然老化,從而導致機器人電路板故障。環境因素:由于操作者的保養不當,機器人電路板上彌漫了灰塵,可以造成信號短路。其他因素:靜電也常造成
發表于 09-17 07:33
機器人時代已正式到來
你是否為每天重復的工作而煩惱, 你是否在為了一件事排隊等候浪費大量時間, 你是否很多時候想解放雙手干自己感興趣的事,那么機器人時代來了,你可以想象的都可以替你辦到。
發表于 07-18 08:55
?2933次閱讀
智能機器人時代哪些工作處于危險之中?
近年來,智能機器人作為未來的重要發展方向,是當之無愧的主角。從人們的日常生活到產品生產再到智能制造,都有智能機器人應用場景。但是在智能機器人時代,哪些工作處于危險之中?這是一個值得討論和關注的社會問題。
機器人時代:機器人市場增加,人類未來終將會與各種機器人共存!
技術變革之快,總是超乎保守者的想象。 在許多人的直覺里,過去幾年,當科技媒體在向大眾描繪機器人時代的恢弘藍圖時,還仿佛是在談論未來一隅,但忽如一夜,人們就已能清晰聽到機器人技術落地的聲音。 能自己
服務機器人時代,真的要到來了嗎
機器人時代真的到來了嗎? 根據IFR統計,2016年以來,我國服務機器人市場規模年平均增長率達到27.5%,2021年更是預計達到302.6億元,可以說增速明顯,然而事實上,在科技媒體不斷宣揚機器人時代已經到來時,目前商用服務
焊接機器人編程方法及流程技巧
焊接機器人編程方法有什么?所謂焊接機器人是從事焊接的工業機器人,廣泛應用于汽車制造、造船、航空等領域。使用機器人時,首先要做好編程,使機器人
機器人梯形加減速軌跡時間縮放
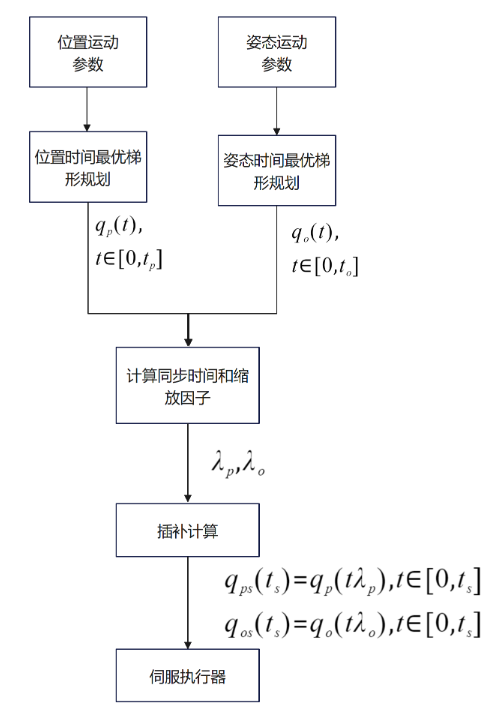
基于上面的原理,不管是q(t)是何種加減速算法生成,都可以使用上面的時間縮放法進行時間同步,下面以梯形減速為例進行說明,流程如下圖所示。 從流程圖中可以看出,只需在插補環節對





 工商網監
工商網監
評論