") 激光雷達(dá)如何加速賦能城市NOA功能落地?
激光雷達(dá)如何加速賦能城市NOA功能落地?
2023 年 11 月 4 號(hào),“激光雷達(dá)助力城市 NOA 駛?cè)肓慨a(chǎn)快車道”技術(shù)分享會(huì)在禾賽麥克斯韋智造中心舉辦。禾賽戰(zhàn)略負(fù)責(zé)人施葉舟、輕舟智航產(chǎn)品負(fù)責(zé)人許諾,與行業(yè)媒體專家、先鋒用戶等,一起就激光雷達(dá)如何加速賦能城市 NOA 功能落地進(jìn)行了深入交流。
激光雷達(dá):
車企競逐城市 NOA 的
“秘密武器”
激光雷達(dá)成為車企落地高階智駕功能的必選項(xiàng)
據(jù)近期媒體報(bào)道,熱門車型的高階智駕版選裝率已經(jīng)突破了 60% 的占比,消費(fèi)者對(duì)智能駕駛功能的認(rèn)可和熱情持續(xù)高漲。主機(jī)廠方面,國內(nèi)率先落地城市 NOA 的智能車型均搭載了激光雷達(dá);海外布局 L3 智駕功能的頭部車企也都配備了激光雷達(dá)。
率先在美國獲得 L3 級(jí)智能駕駛運(yùn)營許可的梅賽德斯-奔馳官方表示:奔馳的 DRIVE PILOT 搭載包含激光雷達(dá)在內(nèi)的多個(gè)傳感器,足夠的安全冗余對(duì)實(shí)現(xiàn)安全可靠的 L3 級(jí)別智能駕駛是必不可少的。其 2024 年款 S 級(jí)和 EQS 轎車車型將會(huì)搭載此智駕系統(tǒng)。
本質(zhì)上,是激光雷達(dá)具有「抗干擾」「真三維」「高置信度」的優(yōu)勢(shì),能為算法預(yù)測(cè)和規(guī)控提供高質(zhì)量的感知輸入。
激光雷達(dá)既是智能汽車的「隱形安全氣囊」,更是加速算法開發(fā)落地的「秘密武器」。
MIT:激光雷達(dá)夜間融合感知精度是攝像頭的 3 倍
工作原理上,激光雷達(dá)能主動(dòng)發(fā)射人眼安全的不可見光,可以“自己照亮道路”,不依賴外界環(huán)境光,在視線較差的夜晚,也能清晰地還原行車環(huán)境,穩(wěn)定地為算法提供感知數(shù)據(jù)。
在一項(xiàng) MIT 的研究論文中,作者對(duì)比基于攝像頭數(shù)據(jù)的算法和融合了激光雷達(dá)數(shù)據(jù)的算法結(jié)果發(fā)現(xiàn):攝像頭算法到了夜晚感知精度有明顯的下降,而通過融合激光雷達(dá),可以將夜晚環(huán)境的感知精度提升至 3 倍。這項(xiàng)研究結(jié)果非常直接地展現(xiàn)了激光雷達(dá)對(duì)夜晚感知的重要性,能進(jìn)一步提升夜晚行車的安全。
同樣,在「大光比」「對(duì)向強(qiáng)光」等其他攝像頭感知相對(duì)較差的場景下,激光雷達(dá)仍然能憑借接收自身發(fā)出的紅外光,進(jìn)行穩(wěn)定的感知輸出。
感知更精準(zhǔn),直擊 AEB 誤觸發(fā)行業(yè)痛點(diǎn)
AEB 功能的推出,是為了幫助車輛減少碰撞,讓行車更加安全。但實(shí)際使用過程中,受限于感知精準(zhǔn)度,會(huì)出現(xiàn) AEB 誤觸發(fā)事件,即在不該剎車的時(shí)候剎車,輕的會(huì)使得乘坐體驗(yàn)下降,嚴(yán)重的甚至?xí)?dǎo)致后車追尾、車內(nèi)人員受傷。
出現(xiàn)誤觸發(fā)的主要原因是車輛感知精度不足,導(dǎo)致決策失誤,比如在遇到減速帶、車庫轉(zhuǎn)彎、隔離帶、路邊樁桶,如果對(duì)距離、尺寸的感知精度不高,會(huì)誤以為這些物體阻礙了車輛行駛,威脅到行駛安全,從而觸發(fā) AEB。但通過激光雷達(dá)的厘米級(jí)精度,車輛能做出更加準(zhǔn)確的判斷,諸如:減速帶非常低矮可以通過,隔離帶不在行車路徑上……
從實(shí)際效果看,融合了激光雷達(dá)的理想 L9 AEB 誤觸發(fā)率已經(jīng)低至 0.31 次/10 萬公里,遠(yuǎn)低于行業(yè)水平 1 次/10 萬公里,把誤觸發(fā)率降低了 70%。
極大降低“算法+算力+數(shù)據(jù)”等隱性成本
施葉舟指出,特斯拉堅(jiān)持視覺算法路線,背后隱含的是數(shù)據(jù)驅(qū)動(dòng)的邏輯。與這套方案相匹配的是特斯拉通過數(shù)百萬輛車源源不斷采集的數(shù)據(jù),官方統(tǒng)計(jì),截止 2023 年 10 月,Autopilot 累計(jì)行駛里程超 90 億英里,F(xiàn)SD beta 累計(jì)行駛里程超 5 億英里。
而為了處理這些海量數(shù)據(jù),特斯拉儲(chǔ)備了 14000 塊總價(jià)值數(shù)十億的 AI 芯片,可同時(shí)處理 1600 億幀圖像。與此同時(shí),特斯拉從 2014 年開始自研芯片,21 年發(fā)布了 7 nm AI 訓(xùn)練芯片以更好地適配算法模型。
“算法+算力+數(shù)據(jù)”,構(gòu)成了后來者難以追趕的競爭壁壘。
從全局看,不光要關(guān)注看得見的顯性成本,更要關(guān)注看不見的隱性成本。拿掉激光雷達(dá)看似節(jié)省了一些硬件成本,但車端感知能力的下降,需要在云端投入更多的資源進(jìn)行開發(fā),極大抬高了隱性成本,在車輛銷量沒有非常高的情況下,這些隱性成本均攤下來實(shí)際上遠(yuǎn)高于硬件成本。
激光雷達(dá)的加入, 讓感知精度領(lǐng)先視覺算法 3 年以上
Nuscenes 是全世界影響力最大的開源數(shù)據(jù)集之一,各大頂尖算法在該數(shù)據(jù)集上進(jìn)行測(cè)試打分。統(tǒng)計(jì)發(fā)現(xiàn),視覺算法 2023 年所達(dá)到的平均感知精度仍然不及融合激光雷達(dá)算法在 3 年前的水平。5
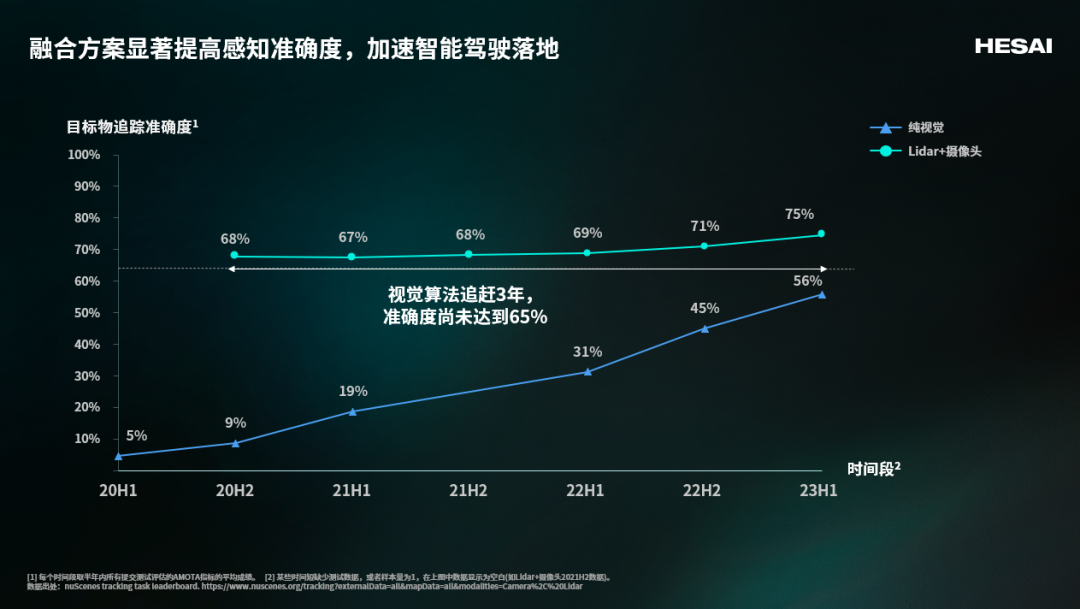
與此同時(shí),激光雷達(dá)融合算法也在快速迭代升級(jí),多傳感器數(shù)據(jù)的融合方法從基于目標(biāo)識(shí)別結(jié)果的「后融合」,到特征級(jí)的「中融合」,再向著更加底層的「前融合」發(fā)展,平均感知精度在近兩年呈現(xiàn)出了加速提升的趨勢(shì)。
無論是語義識(shí)別還是占用網(wǎng)絡(luò),
有限的數(shù)據(jù)訓(xùn)練不能覆蓋所有通用障礙物
首先傳統(tǒng)的基于“語義識(shí)別”的視覺算法,由于需要預(yù)先設(shè)定物體種類“白名單”,這樣的白名單往往只能涵蓋高頻出現(xiàn)的道路元素和障礙物,例如:機(jī)動(dòng)車、自行車、行人、小孩、水馬、紅綠燈等,最多幾十種類型。按照語義識(shí)別的規(guī)則,只有白名單以內(nèi)的物體,才會(huì)被準(zhǔn)確地標(biāo)上“標(biāo)簽”,其余不認(rèn)識(shí)的物體都不能被“框住”,也就是會(huì)被算法「漏識(shí)別」。
例如 2021 年 FSD 推出之后,2022 年 11 月公開測(cè)試6中,特斯拉面對(duì)擺在路上的“黑色小狗”模型,仍然徑直開過去,沒有剎車。原因在于,視覺算法模型對(duì)于道路出現(xiàn)黑色小狗這樣的場景訓(xùn)練還不足夠,而類似這樣的場景難以通過數(shù)據(jù)訓(xùn)練全部覆蓋,總會(huì)有沒見過的“例外”。
視覺占用網(wǎng)絡(luò)的推出仍然不能完全解決以上難題。在一項(xiàng)研究占用網(wǎng)絡(luò)的論文7中,算法在對(duì)道路進(jìn)行網(wǎng)格處理時(shí),不常見的“黑色消防栓”就沒有被檢測(cè)為障礙物。究其原因是因?yàn)檎加镁W(wǎng)絡(luò)同樣依賴數(shù)據(jù)訓(xùn)練。為了覆蓋更多障礙物的識(shí)別,必然伴隨著數(shù)據(jù)采集標(biāo)注量的增大,對(duì)于算法的訓(xùn)練成本投入會(huì)持續(xù)增加,但是帶來的邊際效應(yīng)會(huì)越來越小。
相比之下,激光雷達(dá)則直接得多,不用訓(xùn)練,有無障礙物可以直接基于空間點(diǎn)云的有無進(jìn)行判斷。
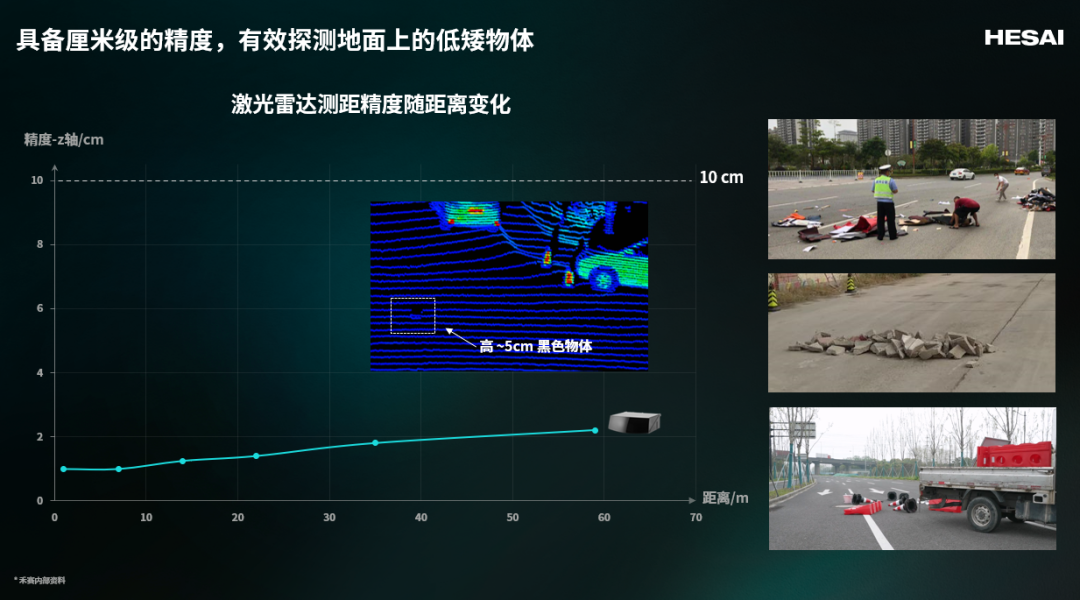
厘米級(jí)感知低矮物體,高效追蹤近距離物體
低矮物體的準(zhǔn)確判斷也是視覺算法的難點(diǎn),考慮到低矮物體往往只有十幾厘米或更矮,視覺算法的精度不足以準(zhǔn)確測(cè)量,因此在沒有明顯的語義特征時(shí),低矮物體“是否識(shí)別到”“有多高”“能不能通過”,成為了影響行車體驗(yàn)?zāi)酥涟踩牟豢煽匾蛩亍?/p>
而激光雷達(dá)對(duì)高度的測(cè)量精度穩(wěn)定在「幾厘米」水準(zhǔn)8,即使是低矮物體,也不會(huì)出現(xiàn)遺漏。
視覺算法的另一難點(diǎn)是,對(duì)于近距離物體的速度監(jiān)測(cè),需要結(jié)合多幀圖像以及海量的算法過程,這樣的復(fù)雜運(yùn)算大大增加了延時(shí),從而降低了及時(shí)性,因此單純靠視覺算法,應(yīng)對(duì)「近距離加塞」「擁堵跟車」顯得力不從心,更別提各種突然竄出來的電動(dòng)車了。
相比而言,激光雷達(dá)憑借三維位置信息,通過簡單高效的幾何運(yùn)算就能獲取速度,就顯得游刃有余的多。從輕舟智航的實(shí)測(cè)視頻來看,融合激光雷達(dá)的感知算法很好地應(yīng)對(duì)了各類近距離極限場景。

最后,施葉舟指出,加速城市 NOA 功能量產(chǎn)意味著建立先發(fā)優(yōu)勢(shì),而激光雷達(dá)正是加速智駕算法開發(fā)的利器。誰能將感知算法做到好用,將城市 NOA 功能盡快量產(chǎn),誰才能盡早獲得消費(fèi)者的認(rèn)可,在智駕的“戰(zhàn)場”上領(lǐng)先一個(gè)身位。
城市 NOA 規(guī)模化落地,
迎來“ iPhone 時(shí)刻”
——by 輕舟智航產(chǎn)品負(fù)責(zé)人許諾
輕舟智航多款標(biāo)桿產(chǎn)品搭載激光雷達(dá)
許諾首先分享了輕舟智航在 L4 自動(dòng)駕駛、L2+ 高階輔助駕駛量產(chǎn)等多款標(biāo)桿產(chǎn)品中使用了激光雷達(dá),包括在無人駕駛小巴等“龍舟”系列產(chǎn)品上標(biāo)配了多個(gè)「360° 旋轉(zhuǎn)式圖像級(jí)激光雷達(dá) Pandar128」,在高階輔助駕駛解決方案“輕舟”系列 MAX 產(chǎn)品上配置了「超高清遠(yuǎn)距激光雷達(dá) AT128」。
在談到激光雷達(dá)的作用時(shí),許諾直言,現(xiàn)階段單純依靠視覺方案,很難應(yīng)對(duì)中國城市道路中的各類 Corner Case。
“激光雷達(dá),是以投入換時(shí)間,加速城市 NOA 落地的捷徑。” 許諾這樣概括。
具體表現(xiàn)為四點(diǎn):
擅長處理城市復(fù)雜場景
當(dāng)高階輔助駕駛在開放多樣的城區(qū)場景落地過程中,會(huì)不斷地遇到從未見過的棘手問題,如何靈活地與近距離車輛博弈,如何在夜間攝像頭視線不佳時(shí)穩(wěn)定行駛,如何在沒有車道線的停車樓穿行。輕舟認(rèn)為,激光雷達(dá)對(duì)環(huán)境的精準(zhǔn)感知,能夠幫助車輛更好地應(yīng)對(duì)城市的復(fù)雜場景。
許諾還在 Q&A 時(shí)提到:
不同的傳感器是一定會(huì)帶來不同的系統(tǒng)差別。舉例來看,如果是視覺感知,當(dāng)遇到眩光或者當(dāng)有物體遮擋住傳感器就會(huì)降低感知能力,但增加一顆其他的傳感器,比如說激光雷達(dá),就會(huì)增加一份安全冗余。
以 AEB 為例,如果車輛配備激光雷達(dá),作為算法公司一定會(huì)去使用激光雷達(dá),因?yàn)橐呀?jīng)有了這樣一個(gè)很好的硬件配置在里面,如果不用,那相當(dāng)于浪費(fèi)了。
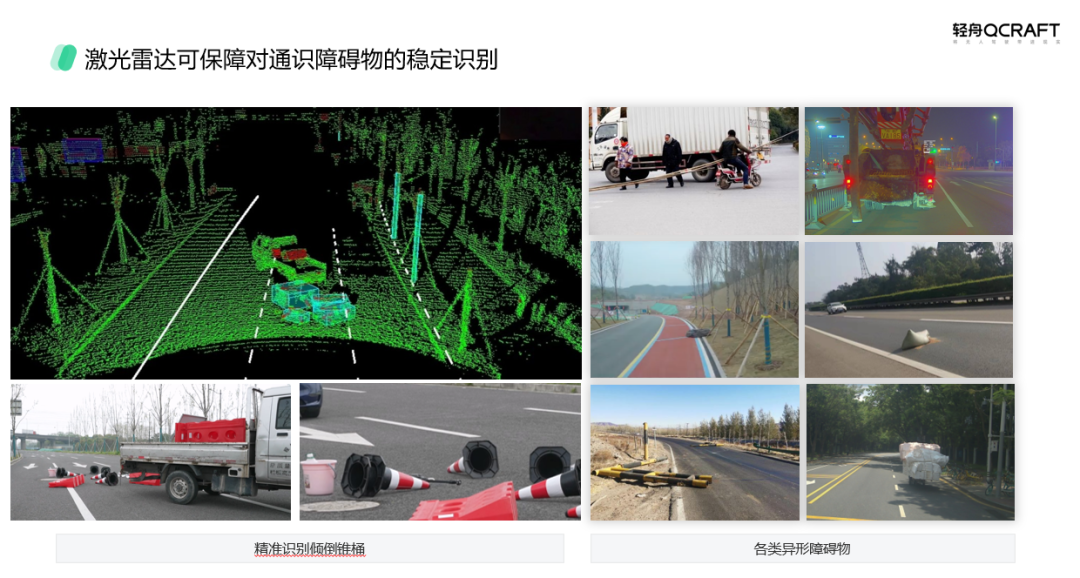
穩(wěn)定識(shí)別通用障礙物
輕舟具備行業(yè)領(lǐng)先的通用障礙物識(shí)別能力,融合了激光雷達(dá)數(shù)據(jù),算法可以在不檢測(cè)物體類別的情況下對(duì)物體進(jìn)行檢出,保證行車安全。
而如果 OmniNet 感知大模型,將多傳感器時(shí)序穿插融合,通過在重點(diǎn)區(qū)域激光雷達(dá)與圖像的結(jié)合將提升感知精度,采用 120° 激光雷達(dá)對(duì)前向進(jìn)行了 3D 感知覆蓋,幫助算法解決難處理的低速和靜態(tài)物體,從而用一顆激光雷達(dá)方案實(shí)現(xiàn)了非常好的城市 NOA 體驗(yàn)。
采用視覺算法,許諾提到:“即便是隨著數(shù)據(jù)量越來越多,能處理更多的長尾場景,但是要把長尾場景全部處理完,實(shí)際上是一個(gè)非常困難的一個(gè)事情。”
輕舟展現(xiàn)了行業(yè)領(lǐng)先的 OmniNet 感知大模型,將多傳感器時(shí)序穿插融合,通過在重點(diǎn)區(qū)域激光雷達(dá)與圖像的結(jié)合將提升感知精度,采用 120° 激光雷達(dá)對(duì)前向進(jìn)行了 3D 感知覆蓋,幫助算法解決難處理的低速和靜態(tài)物體,從而用一顆激光雷達(dá)方案實(shí)現(xiàn)了非常好的城市 NOA 體驗(yàn)。
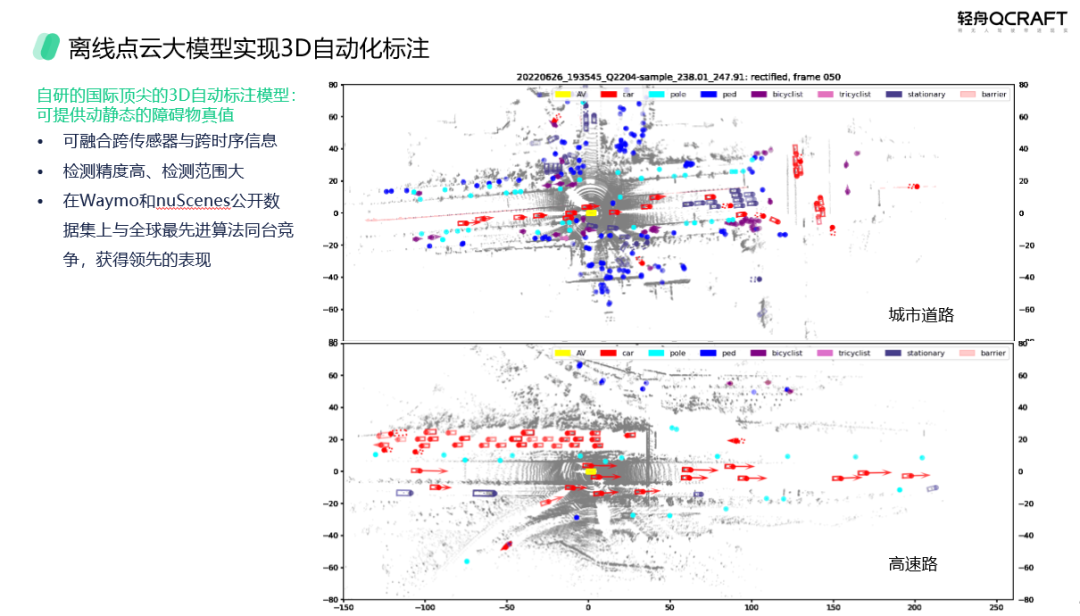
加速算法迭代, 提供精準(zhǔn)真值數(shù)據(jù),高效挖掘長尾數(shù)據(jù)
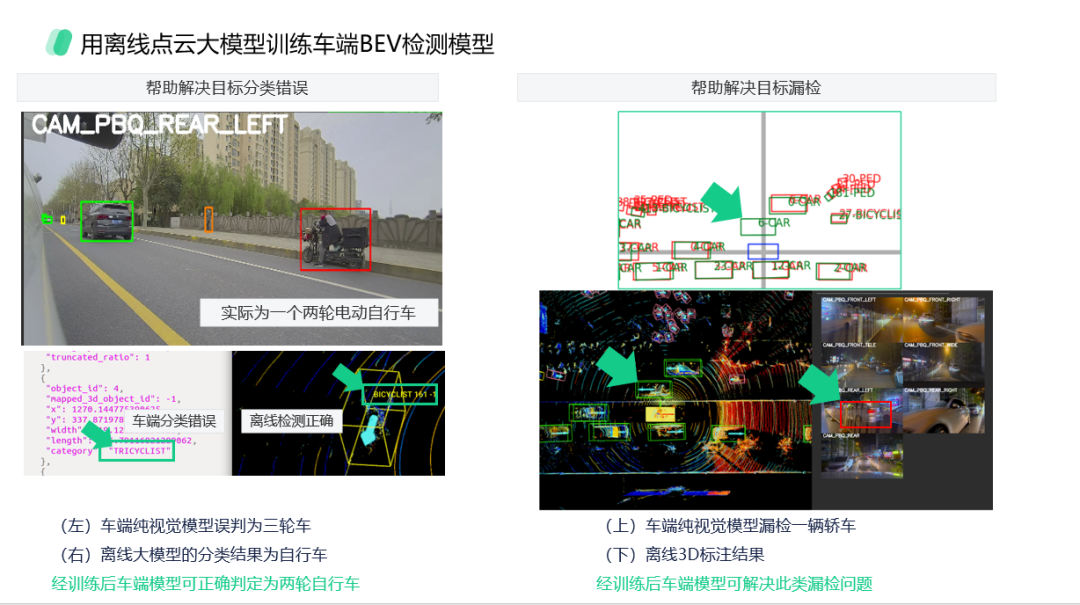
作為高精度的傳感器,激光雷達(dá)數(shù)據(jù)可以在點(diǎn)云大模型的解析下進(jìn)行自動(dòng)化標(biāo)注,為算法提供真值,加速算法進(jìn)化迭代。
許諾在分享時(shí)舉了兩個(gè)例子:一個(gè)是在夜晚道路上,視覺算法漏檢了一輛隔離帶對(duì)面的車輛,而通過點(diǎn)云標(biāo)注正確識(shí)別了這輛車;另外一個(gè)是視覺算法誤檢了一輛兩輪車為三輪車,而通過點(diǎn)云標(biāo)注同樣糾正了這個(gè)問題。
最后,激光雷達(dá)對(duì)物體的識(shí)別不依賴預(yù)設(shè)的語義信息,舉例來說,下圖中躺在路邊的行人,如果沒有激光雷達(dá)作為感知補(bǔ)充,可能很難識(shí)別到。
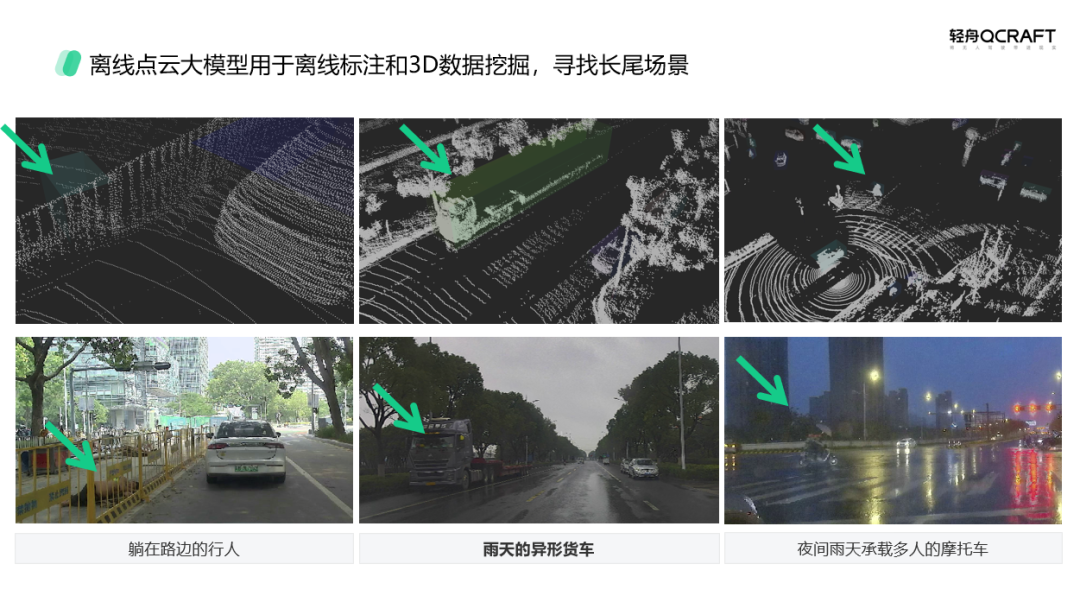
因此,利用激光雷達(dá)數(shù)據(jù)可以更好地挖掘長尾場景,高效地實(shí)現(xiàn)數(shù)據(jù)積累,進(jìn)一步加速算法的進(jìn)化,更早實(shí)現(xiàn)量產(chǎn)落地。
審核編輯:劉清
-
傳感器
+關(guān)注
關(guān)注
2562文章
52559瀏覽量
763655 -
智能駕駛
+關(guān)注
關(guān)注
4文章
2774瀏覽量
49684 -
激光雷達(dá)
+關(guān)注
關(guān)注
971文章
4192瀏覽量
191926
原文標(biāo)題:激光雷達(dá)如何加速城市 NOA 落地?我們這次展開聊聊
文章出處:【微信號(hào):hesaitech_sh,微信公眾號(hào):禾賽科技】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
為什么城市NOA離不開激光雷達(dá)?

鐳神智能激光雷達(dá)飛行汽車/eVTOL避障系統(tǒng)解決方案—開啟低空安全飛行新未來

銳馳智光激光雷達(dá)賦能移動(dòng)式太陽能發(fā)電艙
DeepSeek:2025年激光雷達(dá)技術(shù)與行業(yè)應(yīng)用趨勢(shì)

一則消息引爆激光雷達(dá)行業(yè)!特斯拉竟然在自研激光雷達(dá)?
激光雷達(dá),明年要降價(jià)至200美元


國產(chǎn)功能安全激光雷達(dá),杭州歐鐳激光技術(shù)有限公司,2D 270° 功能安全型激光雷達(dá) GS1-5#
激光雷達(dá)會(huì)傷害眼睛嗎?

激光雷達(dá)的維護(hù)與故障排查技巧
激光雷達(dá)技術(shù)的基于深度學(xué)習(xí)的進(jìn)步
激光雷達(dá)在城市規(guī)劃中的應(yīng)用
光學(xué)雷達(dá)和激光雷達(dá)的區(qū)別是什么
激光雷達(dá)點(diǎn)云數(shù)據(jù)包含哪些信息
一文看懂激光雷達(dá)






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論