 力致變形驅動和電致變形驅動的柔性變焦透鏡分析
力致變形驅動和電致變形驅動的柔性變焦透鏡分析
摘要:本文從基于力致變形(機械傳動)驅動和基于電致變形(智能材料)驅動兩方面分析了柔性變焦透鏡(FVFL)的發展現狀。通過歸納和分析發現:柔性變焦透鏡均存在溫度、重力對穩定性的影響。傳統力致變形驅動的柔性變焦透鏡變焦范圍大,但響應速度慢,不易微型化設計;電致變形驅動的柔性變焦透鏡響應速度快、結構緊湊。改善變焦透鏡成像質量、降低驅動電壓是目前柔性變焦透鏡的研究熱點。探索新穎的驅動方式,研究低功耗、智能化變焦系統將是柔性變焦透鏡的主要發展趨勢。
關鍵詞:自適應光學;變焦透鏡;智能材料;彈性薄膜
1. 引言
隨著科技的發展,傳統光學變焦成像系統由于存在結構復雜、體積笨重、機械磨損嚴重、加工難度大等缺點,已無法滿足智能化光學設備對自動化、智能化、微型化光學變焦系統的要求。近年來,柔性變焦透鏡已引起國內外學者的廣泛關注,柔性變焦透鏡通常由透明彈性薄膜和透明流體介質等組成,無需機械移動即能實現焦距的調節,具有結構緊湊、控制靈活、制造成本低、無機械磨損、易于集成等諸多優點,可望克服傳統光學系統所面臨的困難。
早在1941年,美國科學家E. F. Flint提出了柔性變焦透鏡,但此后并沒有得到廣泛關注。直至20世紀末才涌現出大量關于柔性變焦透鏡的研究文獻。美國“三大光學中心”之一的中佛羅里達大學光學與激光教育研究中心(CREOL)的Shin-Tson Wu團隊研究了不同驅動機制的自適應光學變焦透鏡,促進了該領域多項關鍵技術的突破。瑞士洛桑聯邦理工學院Muhamed Niklaus等人研究了快速響應的透明電活性聚合物驅動的彈性體透鏡。德國弗萊堡大學Hans Zappe團隊在改善柔性變焦透鏡成像質量方面進行了大量的研究。美國加州大學圣地亞哥分校的De-Ying Zhang等人在流體自適應透鏡的變焦范圍、性能等方面取得一定進展。瑞士Optotune公司的M. Blum團隊在電磁驅動和手動驅動柔性變焦透鏡方面的研究取得了良好進展。新加坡國立大學周光亞和余洪斌的團隊從2008年開始對變焦透鏡開展了大量研究,并取得一定進展。目前柔性變焦液體透鏡存在液體泄漏,溫度、重力影響等問題,基于智能材料的柔性變焦透鏡面臨著驅動電壓較高的挑戰,嚴重限制其發展和應用。
柔性變焦透鏡依據變焦驅動機制可分為力致變形驅動變焦透鏡和電致變形驅動變焦透鏡。本文將從力致變形變焦透鏡和電致變形變焦透鏡兩個方面概括和分析柔性變焦透鏡的發展現狀。從變焦實現方式和主要性能參數進行分析,總結和探討柔性變焦透鏡需要解決的主要難題和發展方向。
2. 力致變形驅動的柔性變焦透鏡
力致變形驅動變焦即是驅動源通過中間傳動環節(如絲桿、流體等)將驅動力作用于液體透鏡使透鏡薄膜變形從而實現變焦,可劃分為基于機械-力式驅動的變焦透鏡、基于流體壓力驅動的變焦透鏡以及基于電磁力作用的變焦透鏡等。2.1 機械-力驅動的柔性變焦透鏡
機械-力驅動主要是通過伺服電機等方式來驅動。2006年,美國中佛羅里達大學Shin-Tson Wu團隊的Hongwen Ren等人提出了采用伺服電機驅動的柔性變焦透鏡,如圖1所示,伺服電機旋轉拉動繩子壓縮橡皮薄膜2,導致透鏡薄膜4變形,實現焦距可調。該透鏡結構緊湊,成本低,但是結構受重力影響嚴重,不易微型化。2010年該團隊的Su Xu等人設計了如圖2所示的力潤濕透鏡(Mechanical-wetting lens)結構,通過旋轉螺紋冒,紅色環形凸出結構驅動藍色薄膜,從而實現手動驅動變焦,可以實現可見光和近紅外成像。
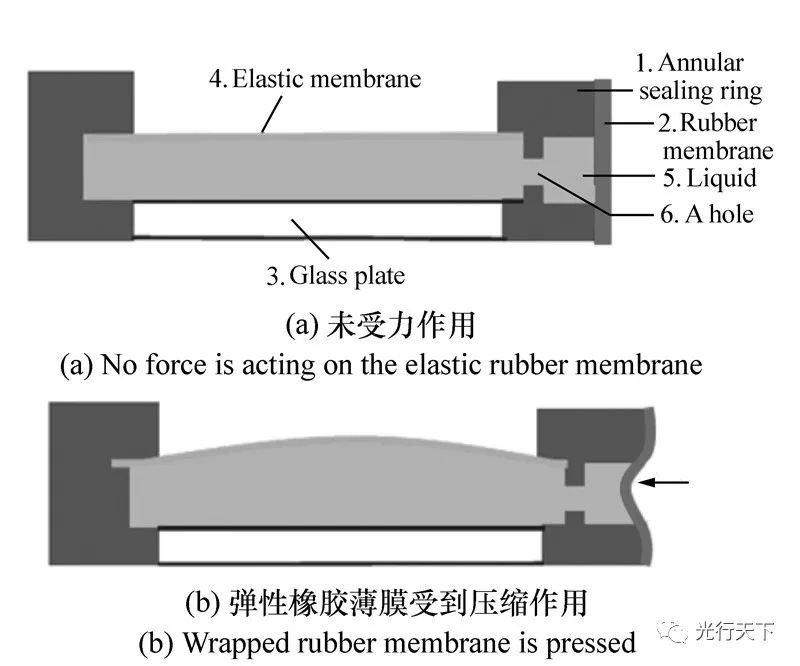
圖1.變焦透鏡結構示意圖
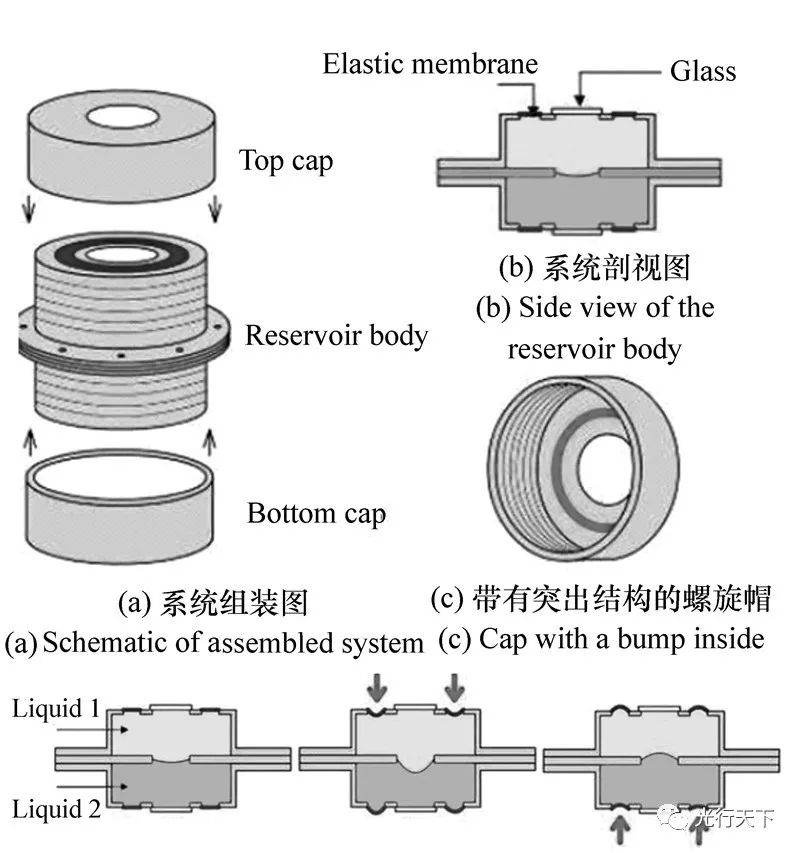
圖2.力潤濕透鏡及其工作原理
2011年,瑞士Optotune公司的M.Blum等人提出了用旋轉絲桿驅動的液體自適應透鏡[17]。2013年,德國弗萊堡大學的Peter Liebetraut等人提出通過多個伺服驅動使透鏡產生非對稱變形,從而實現變焦和像差的控制[25],其結構如圖3所示。該研究仿造人眼睫狀肌通過懸韌帶向晶狀體提供徑向應力的機制,結構較為復雜,對控制精度要求較高。
......
4. 存在的問題及發展趨勢
4.1 存在的問題隨著新型驅動和智能材料的快速發展,人們對柔性變焦透鏡的研究和開發工作得到蓬勃發展和進步。柔性變焦透鏡涉及機械、光學、材料等領域,距離廣泛應用還有一定的差距,許多問題尚待進一步深入研究,目前存在的問題主要表現在以下方面:
(1)液體透鏡蒸發泄漏現象嚴重,重力及溫度的變化影響系統穩定性;(2)目前對像差的校正的研究較少,總的成像效果不是很理想;(3)介電彈性薄膜所需驅動電壓較高,很難實現微型化、低功耗設計。IPMC、壓電驅動所需電壓不高,但是變焦范圍小。同時變形薄膜的松弛現象,影響光學性能的穩定;(4)焦變遲滯現象的研究很少,這對精確控制焦距變化至關重要;
(5)實現智能化變焦以及焦距的精確、快速控制仍是一難題。
4.2 發展趨勢
隨著智能化、自動化時代的到來,智能化光學設備、先進醫療設備(如內窺鏡)、自適應光學系統等對新型光學變焦器件的要求不斷升級,柔性變焦透鏡的低功耗、微型化、模塊化、智能化發展將促使這些領域的快速變革。
(1)柔性變焦透鏡的性能優化。降低重力、溫度、泄漏等對柔性變焦透鏡工作性能的影響,校正柔性變焦透鏡的像差,提高系統的響應速度。(2)進行系統的動力學研究。探明材料彈性模量、膜厚、變形等因素對系統整體性能的影響,為實際應用奠定理論基礎。(3)基于智能材料的柔性變焦透鏡的研究。尋求和探索新型驅動方式一直是柔性光學乃至整個驅動領域研究的熱點之一。
5. 結束語
本文從力致變形驅動和電致變形驅動的柔性變焦透鏡兩方面進行分析和總結。總的來說,液體變焦透鏡均存在蒸發泄漏,重力、溫度的影響等問題。力致變形柔性變焦透鏡主要有機械-力驅動變焦透鏡、流體壓力驅動變焦透鏡和電磁力驅動變焦透鏡。機械-力、壓力驅動的柔性變焦透鏡變焦范圍大,但整體系統復雜、系統穩定性較差、響應時間慢等嚴重制約其發展和應用,電磁力驅動的柔性變焦透鏡具有響應速度快、變焦范圍大及功耗低等優點已得到良好應用。電致變形(智能材料)驅動的柔性變焦透鏡以介電彈性體(DE)驅動的變焦透鏡的研究為主要方向,響應速度快、結構緊湊、功耗低,但驅動電壓高這一難題使其距離實際應用還有一段距離。通過設計合理的透鏡結構改善柔性變焦透鏡成像質量,擴大變焦范圍等是目前的主要研究熱點。提高變焦透鏡的穩定性以及低功耗智能化設計,基于智能材料驅動的柔性變焦透鏡的研究等是未來的主要發展趨勢。由于柔性變焦透鏡具有控制靈活、制造成本低、無機械磨損、易于集成等諸多優點,有可能全面覆蓋傳統光學鏡頭的應用領域,將是以后光學發展的重要熱點方向之一。
審核編輯:彭菁
-
光學
+關注
關注
4文章
783瀏覽量
36979 -
智能化
+關注
關注
15文章
5098瀏覽量
56921 -
變焦鏡
+關注
關注
0文章
2瀏覽量
6333 -
智能材料
+關注
關注
0文章
10瀏覽量
7495
原文標題:柔性變焦透鏡發展現狀
文章出處:【微信號:光行天下,微信公眾號:光行天下】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
高壓放大器在柔性爬行機器人驅動性能研究中的應用

電壓放大器在可變形機翼縮比模型主動變形實驗中的應用
【轉】修正FPC底片變形方法的注意事項
PCB工藝底片變形的修正方法
基于細分的骨架驅動網格模型變形方法
PCB板變形的危害_PCB變形的原因_PCB變形的改善措施
基于雙邊介電彈性體致動器的肌肉啟發軟體機器人設計

ATA-7030高壓放大器在電致變形柔性致動器表情機器人實驗中的應用

高壓放大器在電致動介電彈性體圓柱驅動器中的應用
安泰電壓放大器在可變形機翼縮比模型主動變形實驗中的應用





 工商網監
工商網監
評論