") 補(bǔ)盲激光雷達(dá),照亮自動(dòng)駕駛隱秘的角落
補(bǔ)盲激光雷達(dá),照亮自動(dòng)駕駛隱秘的角落

近日,“一位清潔工躺地下車庫通道午睡被碾身亡,司機(jī)被羈押366天后被判無罪,獲賠21萬”的新聞上了各大熱搜,中間責(zé)任判定自有專業(yè)部門進(jìn)行,但是事故發(fā)生時(shí)的場(chǎng)景引發(fā)了筆者的思考。 圖1所示是事故發(fā)生時(shí)的視頻截圖,從圖1可見,紅圈位置處于司機(jī)的視野盲區(qū)中,司機(jī)是無法發(fā)現(xiàn)紅圈位置有一個(gè)躺著午睡的人的。那么問題來了,如果車輛此時(shí)激活的是L4代客泊車功能,正在由系統(tǒng)控制車輛通過車庫入口,那么自動(dòng)駕駛系統(tǒng)此時(shí)能避免嗎。
基于代客泊車當(dāng)前主流的傳感器配置,筆者的結(jié)論是:無法避免。 一個(gè)躺著的人離地也就20cm左右,在上述場(chǎng)景下,無論是激光雷達(dá)還是相機(jī)還是毫米波雷達(dá)由于本身盲區(qū)及視場(chǎng)角限制都無法探測(cè)到紅圈處躺著的人。那么當(dāng)下或未來有沒有一種傳感器,可以應(yīng)對(duì)這種場(chǎng)景? 不僅有而且已經(jīng)有不少廠家在嘗試裝車,這個(gè)傳感器就是叫好不叫座的補(bǔ)盲激光雷達(dá)。
車載激光雷達(dá)在2022年迎來了量產(chǎn)上車的大年,一眾新勢(shì)力主機(jī)廠在新車型上裝配激光雷達(dá)后,各大傳統(tǒng)主機(jī)廠也開始紛紛跟上腳步。但中長距激光雷達(dá)已經(jīng)卷不出新意后,大家紛紛把目光投到了下一個(gè)領(lǐng)域—補(bǔ)盲激光雷達(dá)。
為何大家會(huì)覺得補(bǔ)盲激光雷達(dá)會(huì)是下一個(gè)可卷的領(lǐng)域呢?這就要從主機(jī)廠們卷激光雷達(dá)的數(shù)量開始說起,為了實(shí)現(xiàn)全車360°視場(chǎng)角全覆蓋,盡可能的實(shí)現(xiàn)傳感器視野盲區(qū),主機(jī)廠們?cè)谝恍┢炫炣囆蜕隙蚜撕脦最w激光雷達(dá)。小鵬G9有2顆,極狐阿爾法s華為HI版方案用了3顆,長城機(jī)甲龍堆了4顆。 4顆激光雷達(dá)的車型可以完全覆蓋車輛前、后、左、右四個(gè)方向,而3顆激光雷達(dá)的布置舍棄了后向,1顆或者2顆激光雷達(dá)的車型都將雷達(dá)布置在前向,但2顆激光雷達(dá)車型前向左右兩側(cè)的視場(chǎng)角要比1顆激光雷達(dá)的會(huì)更大一點(diǎn)。
這么一看,激光雷達(dá)這玩意兒多多益善呀,但是激光雷達(dá)這個(gè)東西貴呀,從自駕系統(tǒng)硬件成本上來測(cè)算,除了域控,第二貴的就屬激光雷達(dá)了。而且激光雷達(dá)的增加會(huì)讓域控處理的感知信息量大幅增加,隨之芯片成本和閃存存儲(chǔ)器(Univeral Flash Storage, UFS)成本也大幅增加,最終反應(yīng)到車輛價(jià)格上就會(huì)導(dǎo)致產(chǎn)品競(jìng)爭(zhēng)力下降。
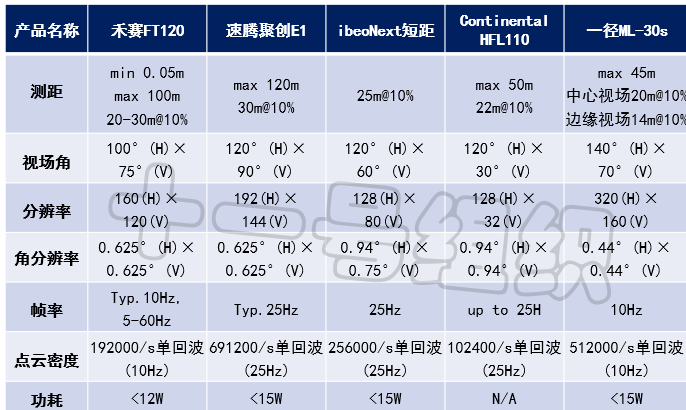
其次,主激光雷達(dá)的技術(shù)規(guī)格側(cè)重遠(yuǎn)距離,垂直視場(chǎng)角只有25°~30°,對(duì)于補(bǔ)盲所希望的大視場(chǎng)角有所不同,用起來不順手。因此,在預(yù)研規(guī)劃下一代自動(dòng)駕駛硬件方案時(shí),主機(jī)廠和供應(yīng)商都會(huì)嚴(yán)肅考慮補(bǔ)盲激光雷達(dá)的產(chǎn)品定位。成本更低但是性能夠用的補(bǔ)盲激光雷達(dá)成了一個(gè)很好的選擇,補(bǔ)盲激光雷達(dá)主要布置在側(cè)向位置,最小外露視窗尺寸小,探測(cè)能力100m左右,視場(chǎng)為100°*75°廣角,高可感知路牌、欄桿、立體車庫夾層,低可探測(cè)孩童、寵物、錐桶、斑馬線等。 如下表1所示,是目前市場(chǎng)上主流的補(bǔ)盲激光雷達(dá)的參數(shù)。
表1 主流補(bǔ)盲激光雷達(dá)參數(shù)對(duì)比
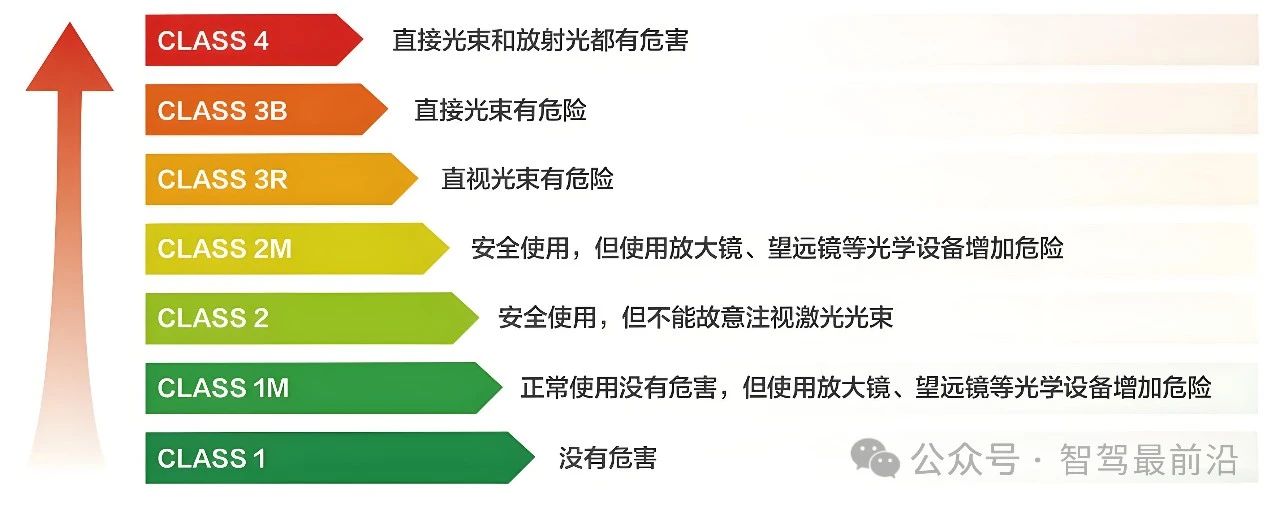
下面筆者以速騰聚創(chuàng)E1為例,詳細(xì)闡述一下補(bǔ)盲激光雷達(dá)的作用,建立起大家對(duì)補(bǔ)盲激光雷達(dá)的一個(gè)基本概念。 速騰聚創(chuàng)E1采用940nm激光波段,激光人眼安全等級(jí)為最高的Class 1 Eye Safety,屬于安全型激光,在正常使用條件不會(huì)對(duì)行人的健康帶來危害。視場(chǎng)角為120°×90°,角分辨率為H×V:0.625°×0.625°,幀率為可配置的10~30Hz。
在100klux光照,10%反射率條件下,其探測(cè)距離為30m,檢測(cè)盲區(qū)低于0.1m,測(cè)距精度為±5cm(1 sigma)。功耗小于15W,重量低至300g,工作溫度范圍為(-40°C,85°C),防護(hù)等級(jí)為IP67,IP6K9K。 從表1可知,補(bǔ)盲激光雷達(dá)的水平視場(chǎng)角都很大,這就能支持最優(yōu)部署方案,所謂最優(yōu)部署方案,就是實(shí)現(xiàn)車輛360度無死角覆蓋,沒有盲區(qū)的存在。如圖2所示的三種部署方案,2補(bǔ)盲1前向能保證最優(yōu)部署方案,3補(bǔ)盲1前向和4補(bǔ)盲1前向已經(jīng)能保證足夠的感知冗余了。這種最優(yōu)部署方案可以保證融合零盲區(qū),提前發(fā)現(xiàn)對(duì)向來車,安全掉頭。
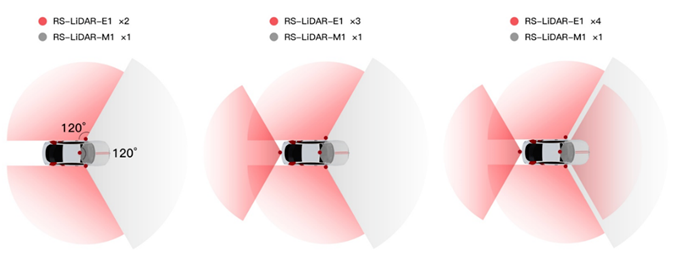
圖2 激光雷達(dá)部署方案 從表1可知,補(bǔ)盲激光雷達(dá)的垂直視場(chǎng)角較前向激光雷達(dá)都大,大垂直視場(chǎng)角有什么好處呢?從圖3的75°視場(chǎng)角和90°視場(chǎng)角比較可以看出,大垂直視場(chǎng)角能兼顧地面補(bǔ)盲與側(cè)向大范圍感知,有效降低盲區(qū)角度和盲區(qū)范圍。從圖4可知,補(bǔ)盲激光雷達(dá)能有效彌補(bǔ)現(xiàn)有自動(dòng)駕駛硬件感知中的Corner Case。
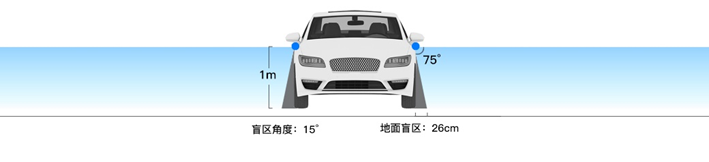
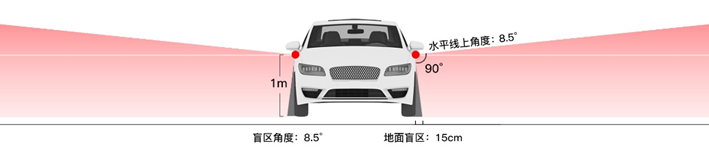
圖3 75°垂直視場(chǎng)角 vs 90°垂直視場(chǎng)角
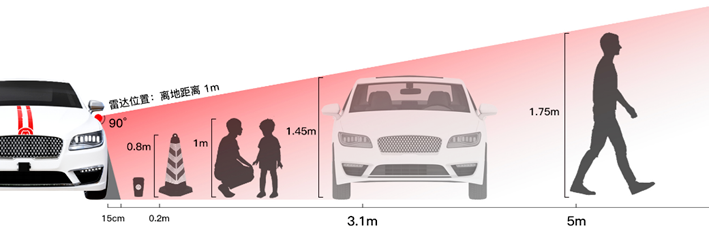
圖4 補(bǔ)盲激光雷達(dá)感知物體 對(duì)于補(bǔ)盲激光雷達(dá)對(duì)自動(dòng)駕駛功能的提升,筆者從泊車、高速和低速三個(gè)方面進(jìn)行闡述。 從代客泊車功能的實(shí)現(xiàn)來看,補(bǔ)盲激光雷達(dá)的增加除了完美實(shí)現(xiàn)自車360無死角的覆蓋之外,還可以精確可靠的感知碰撞邊界,從而實(shí)現(xiàn)真正安全智能可靠的代客泊車功能。
從高速路自動(dòng)駕駛功能來看,目前功能在面對(duì)較擁堵環(huán)境的cut-in/cut-off場(chǎng)景無法應(yīng)對(duì),自車在面對(duì)后車搶行、側(cè)向空間不足時(shí),無法進(jìn)行安全變道,加裝補(bǔ)盲激光雷達(dá)后,自車能有效增加側(cè)向感知性能,從而優(yōu)化變道算法,在較小空間內(nèi)實(shí)現(xiàn)變道。
低速場(chǎng)景,主要是交通擁堵功能,通過兩顆補(bǔ)盲激光雷達(dá)的360全視場(chǎng)角覆蓋,可以解決側(cè)向盲區(qū)和異形目標(biāo)檢測(cè)問題,彌補(bǔ)了前向激光雷達(dá)視場(chǎng)角以外區(qū)域的感知效果差異,能夠有效應(yīng)對(duì)加塞和變道,有效應(yīng)對(duì)復(fù)雜的城區(qū)工況。尤其是在城區(qū)路口轉(zhuǎn)彎、人車混行道路等場(chǎng)景下,由于交通參與者的構(gòu)成比較復(fù)雜,補(bǔ)盲激光雷達(dá)能起到的作用更為顯著。
總的來說,補(bǔ)盲激光雷達(dá)的部署可以提供更為豐富的點(diǎn)云數(shù)據(jù),加強(qiáng)自動(dòng)駕駛系統(tǒng)對(duì)周圍目標(biāo)進(jìn)行精確的分類和識(shí)別,有助于自動(dòng)駕駛系統(tǒng)更好地理解和預(yù)測(cè)其他交通參與者的行為和意圖,從而及時(shí)識(shí)別潛在的危險(xiǎn)和風(fēng)險(xiǎn),并采取適當(dāng)?shù)拇胧﹣肀苊馀鲎不蛘呤鹿剩黾幼詣?dòng)駕駛功能的實(shí)用性。
審核編輯:劉清
-
傳感器
+關(guān)注
關(guān)注
2565文章
52972瀏覽量
767208 -
處理器
+關(guān)注
關(guān)注
68文章
19885瀏覽量
235086 -
激光雷達(dá)
+關(guān)注
關(guān)注
971文章
4234瀏覽量
192820 -
閃存存儲(chǔ)器
+關(guān)注
關(guān)注
0文章
21瀏覽量
9228 -
自動(dòng)駕駛系統(tǒng)
+關(guān)注
關(guān)注
0文章
67瀏覽量
7133
原文標(biāo)題:補(bǔ)盲激光雷達(dá),照亮自動(dòng)駕駛隱秘的角落
文章出處:【微信號(hào):阿寶1990,微信公眾號(hào):阿寶1990】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
自動(dòng)駕駛只用激光雷達(dá)進(jìn)行感知會(huì)有哪些問題?
自動(dòng)駕駛激光雷達(dá)之間會(huì)相互干擾嗎?
激光雷達(dá)在自動(dòng)駕駛領(lǐng)域中的優(yōu)勢(shì)

激光雷達(dá)在自動(dòng)駕駛中為何不可替代?

愛普生高精度車規(guī)晶振助力激光雷達(dá)自動(dòng)駕駛

自動(dòng)駕駛中的激光雷達(dá)是否會(huì)傷害人眼?
激光雷達(dá)技術(shù):自動(dòng)駕駛的應(yīng)用與發(fā)展趨勢(shì)

激光雷達(dá)是自動(dòng)駕駛走的一段彎路嗎?
禾賽激光雷達(dá)助力寶馬智能工廠自動(dòng)駕駛
激光雷達(dá)光電組件的AEC-Q102認(rèn)證:保障自動(dòng)駕駛硬件的可靠性與品質(zhì)
激光雷達(dá)在自動(dòng)駕駛中的應(yīng)用
激光雷達(dá)與純視覺方案,哪個(gè)才是自動(dòng)駕駛最優(yōu)選?
激光雷達(dá)濾光片:自動(dòng)駕駛的“眼睛之選”






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論