") 微針機(jī)器人實(shí)現(xiàn)結(jié)腸給藥的快速自定位和抗蠕動(dòng)粘附
微針機(jī)器人實(shí)現(xiàn)結(jié)腸給藥的快速自定位和抗蠕動(dòng)粘附
攜帶微針的微型機(jī)器人被認(rèn)為是一種有前途的胃腸道給藥新手段,它被設(shè)計(jì)成適應(yīng)胃腸道環(huán)境的幾何形狀和尺寸,在電場(chǎng)、磁場(chǎng)或化學(xué)場(chǎng)等外部場(chǎng)的控制下,以類(lèi)似牽線木偶的方式被推進(jìn)到特定位置進(jìn)行無(wú)痛和微創(chuàng)給藥。通過(guò)微型機(jī)器人攜帶微針進(jìn)入腸道,微針中的藥物可以滲透進(jìn)腸道粘膜以避免在胃腸道的高酸性和不均勻pH環(huán)境中發(fā)生降解,這種新給藥方式在遞送生物分子藥物(如蛋白質(zhì)、核酸和疫苗等)和提高療效上具有獨(dú)特的優(yōu)勢(shì)。然而,目前仍存在許多挑戰(zhàn),如復(fù)雜的控制模式、缺乏運(yùn)動(dòng)和粘附行為的理論、蠕動(dòng)和液體流動(dòng)導(dǎo)致的失敗以及腸梗阻的風(fēng)險(xiǎn)。
近期,廈門(mén)大學(xué)任磊教授、王苗助理教授和廈門(mén)大學(xué)附屬中山醫(yī)院蔡順天副主任醫(yī)師團(tuán)隊(duì)提出了一種受不倒翁(一種被推倒時(shí)能快速恢復(fù)定位的玩具)啟發(fā)的微針機(jī)器人,用于穿透結(jié)腸粘膜給藥,可以免除控制系統(tǒng)、實(shí)現(xiàn)快速自我定向和粘附粘膜、對(duì)抗生理蠕動(dòng),并降低梗阻風(fēng)險(xiǎn)。該團(tuán)隊(duì)利用具有流線型和低重心結(jié)構(gòu)的微型機(jī)器人攜帶微針進(jìn)入斑馬豬的結(jié)腸中,無(wú)需外部控制系統(tǒng)實(shí)現(xiàn)快速定向(<0.6 s)和粘膜粘附,最后從斑馬豬體內(nèi)安全排出。相關(guān)研究?jī)?nèi)容以“Tumbler-Inspired Microneedle Containing Robots: Achieving Rapid Self-Orientation and Peristalsis-Resistant Adhesion for Colonic Administration”為題發(fā)表在《Advanced Functional Materials》期刊上,廈門(mén)大學(xué)在讀博士生黃麗冰為第一作者。
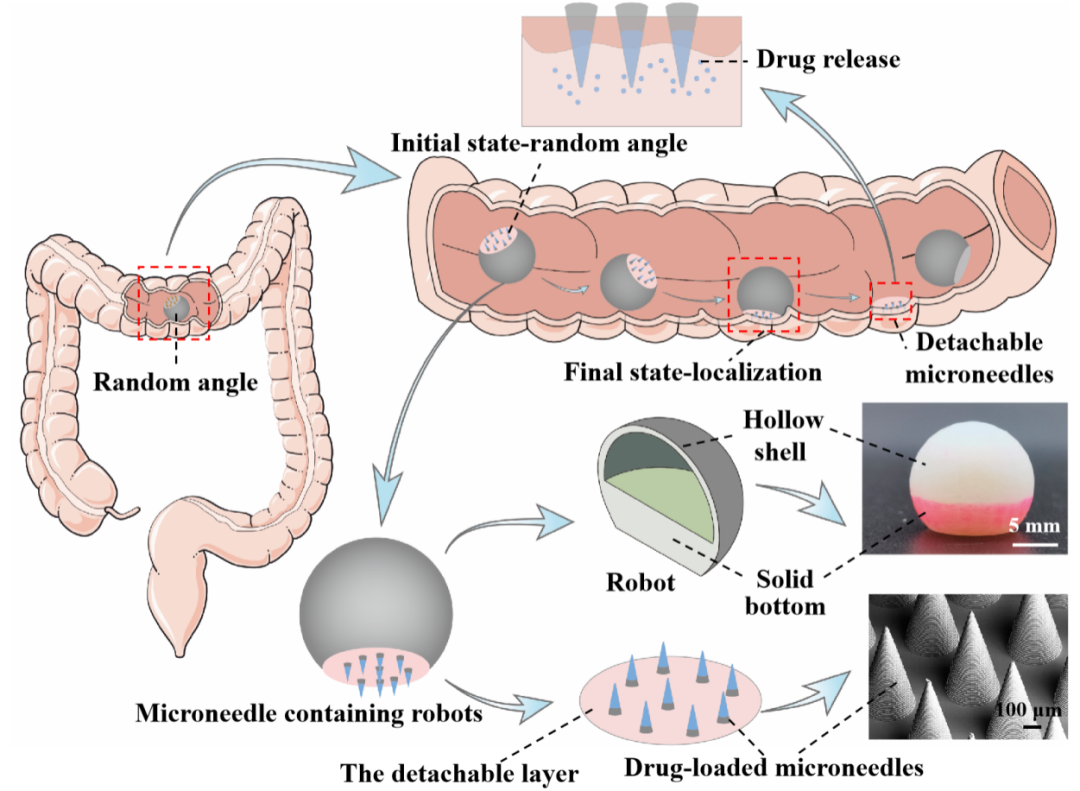
圖1基于3D打印的微針機(jī)器人的快速自定向和結(jié)腸給藥機(jī)制
該研究構(gòu)建了一種在毫秒內(nèi)自導(dǎo)向的微針機(jī)器人。如圖1所示,它由機(jī)器人、微針陣列和可分離層組成,用于結(jié)腸給藥。團(tuán)隊(duì)成員使用摩方精密公司的nanoArch S140 微納3D打印機(jī)制造微米級(jí)別的微針陣列,微針底座300μm,長(zhǎng)600μm,微針間距450 μm,在SEM圖像中展示出良好的形貌和陣列分布。該微針陣列用于負(fù)載不同濃度的亞甲基藍(lán)染料,探究用于結(jié)腸控制釋藥的微針陣列制造的優(yōu)化策略。將優(yōu)化后的微針陣列通過(guò)生物降解聚合物制備的可分離層連接在3D打印機(jī)器人底部,最終制備得到微針機(jī)器人。
研究人員將微針機(jī)器人以隨機(jī)的角度放入結(jié)腸,由于3D一體打印的機(jī)器人的重心較低,可以快速自我定向垂直于粘膜。微針陣列在機(jī)器人重力和結(jié)腸蠕動(dòng)力的合力作用下逐漸穿透粘膜,通過(guò)開(kāi)發(fā)的拉力模型合理評(píng)估出插入的微針機(jī)器人在不脫離粘膜的情況下對(duì)結(jié)腸蠕動(dòng)的阻力約為1.75N,這足以抵抗結(jié)腸蠕動(dòng)產(chǎn)生的推力(通過(guò)計(jì)算約為0.95N),使其成功駐留在結(jié)腸組織中以持續(xù)釋藥。體外停留實(shí)驗(yàn)發(fā)現(xiàn)機(jī)器人和微針陣列之間的可分離層降解后,與微針陣列分離的機(jī)器人在構(gòu)建的體外結(jié)腸仿真模型和COMSOL流-固模型中都證實(shí)了可以在流體流動(dòng)引起的20 mN的小排泄力下安全排出。為了進(jìn)一步驗(yàn)證微針機(jī)器人的有效性和可行性,將含有微針的機(jī)器人注入斑馬豬的結(jié)腸,通過(guò)結(jié)腸鏡觀察到在5 s內(nèi)實(shí)現(xiàn)了自我定位,在重力和結(jié)腸蠕動(dòng)力作用下將微針插入粘膜,微針和機(jī)器人之間的可分離層可以在80 s的時(shí)間內(nèi)降解,機(jī)器人從嵌入粘膜的微針陣列中分離出來(lái),并從結(jié)腸排出。插入的微針被保留在粘膜中,以便在負(fù)載藥物緩慢溶解時(shí)釋放該藥物。與先前報(bào)道的其他系統(tǒng)相比,該工作提出的微針機(jī)器人結(jié)構(gòu)簡(jiǎn)單,不需要外部場(chǎng)控制,可以克服結(jié)腸蠕動(dòng)并降低了結(jié)腸阻塞的風(fēng)險(xiǎn),作為治療慢性炎癥和結(jié)腸癌等疾病的通用給藥平臺(tái)方面具有巨大應(yīng)用潛力。
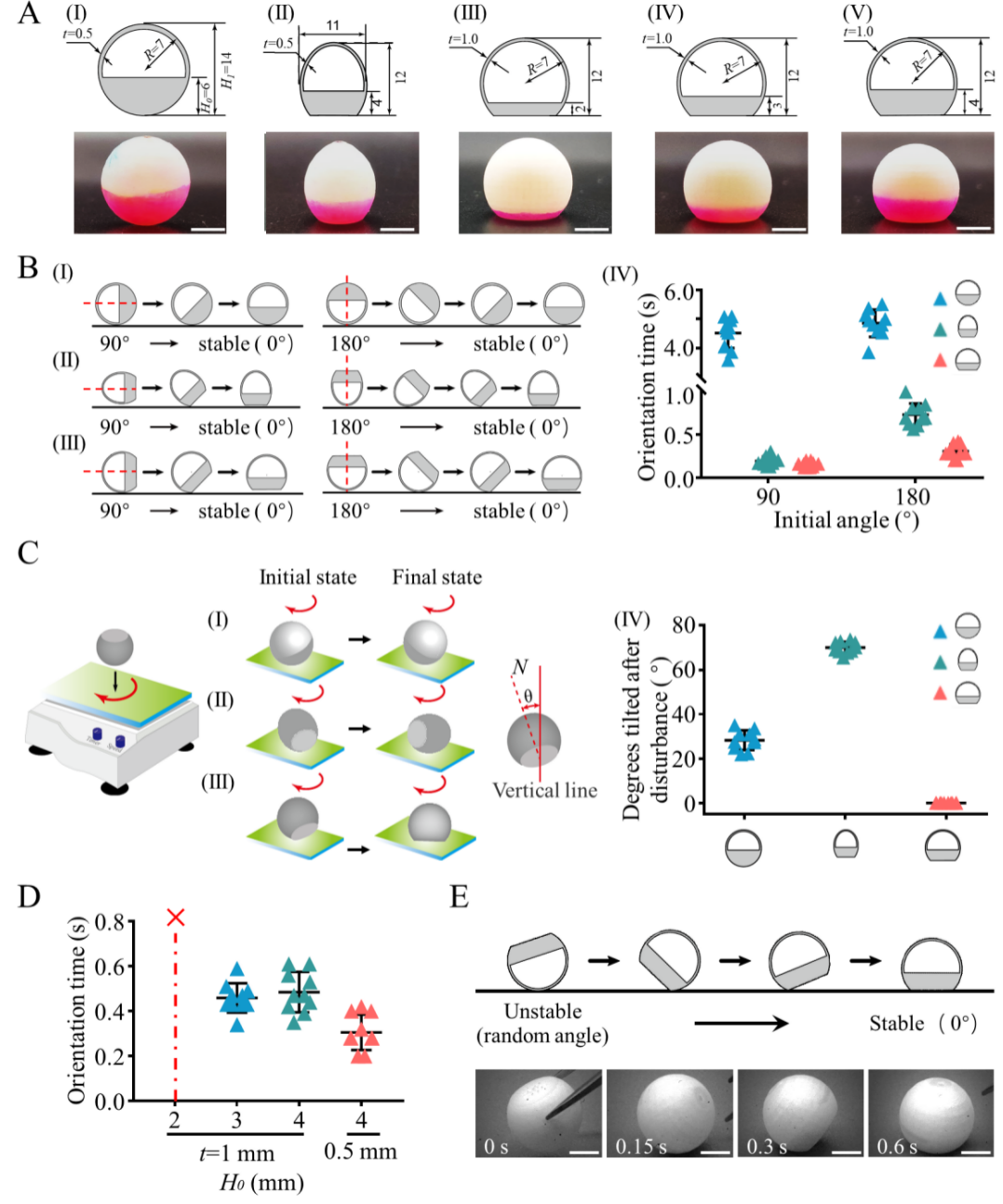
圖2 基于3D打印的微型機(jī)器人的參數(shù)優(yōu)化。(a)半球、球形和橢球形三種形狀和不同底座高度的半球形機(jī)器人(I-V)。(b)初始角度為90°和180°對(duì)不同形狀的機(jī)器人(I-III)的自我定位時(shí)間(IV)的影響。(c) 不同形狀的機(jī)器人在70 rpm的水平振動(dòng)器上的穩(wěn)定性,擾動(dòng)后的最大偏差角度(IV)。(d) 具有不同底座高度和外殼厚度的半球形狀機(jī)器人的定向時(shí)間。(e)參數(shù)優(yōu)化后的機(jī)器人在隨機(jī)角度下的自我定向時(shí)間。
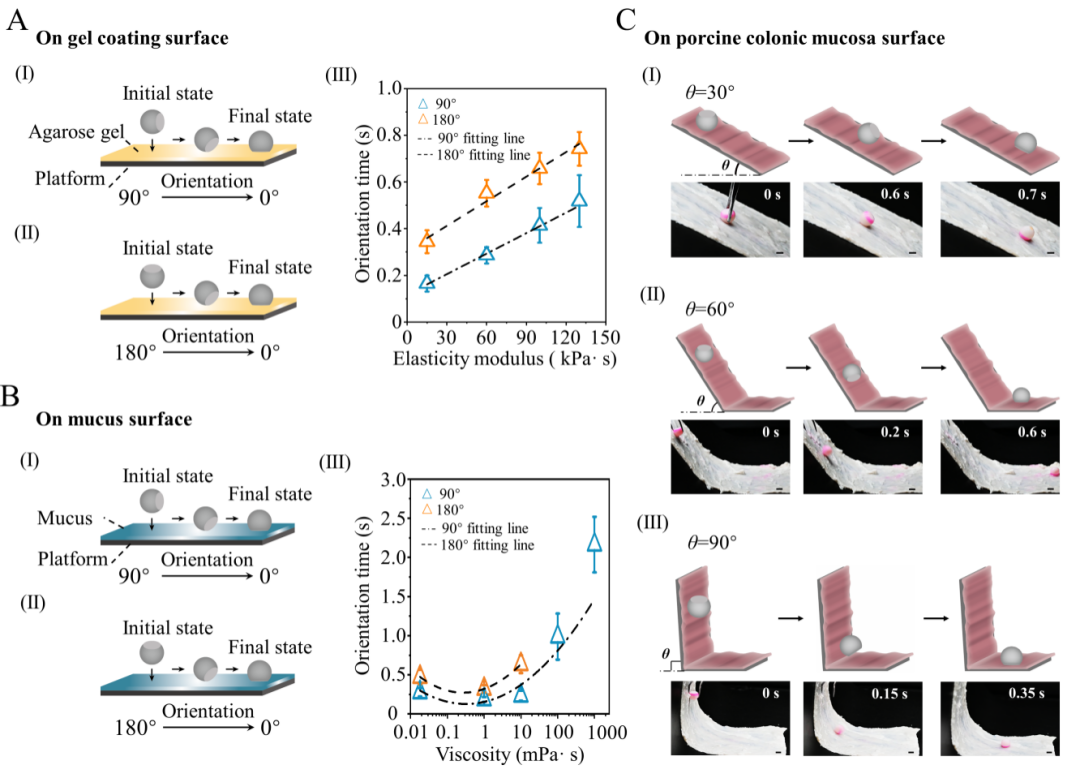
圖3 機(jī)器人在不同表面上的自定向性能。(a)初始角度為90°(I)和180°(II)的微針機(jī)器人在具有不同彈性模量(III)的瓊脂糖凝膠表面上的定向時(shí)間。(b)初始角度為90°(I)和180°(II)的微針機(jī)器人在不同粘度(III)的粘液表面上的定向時(shí)間。(c)機(jī)器人在斜率為30°(I)、60°(II)和90°(III)的豬結(jié)腸粘膜上的自定向時(shí)間。
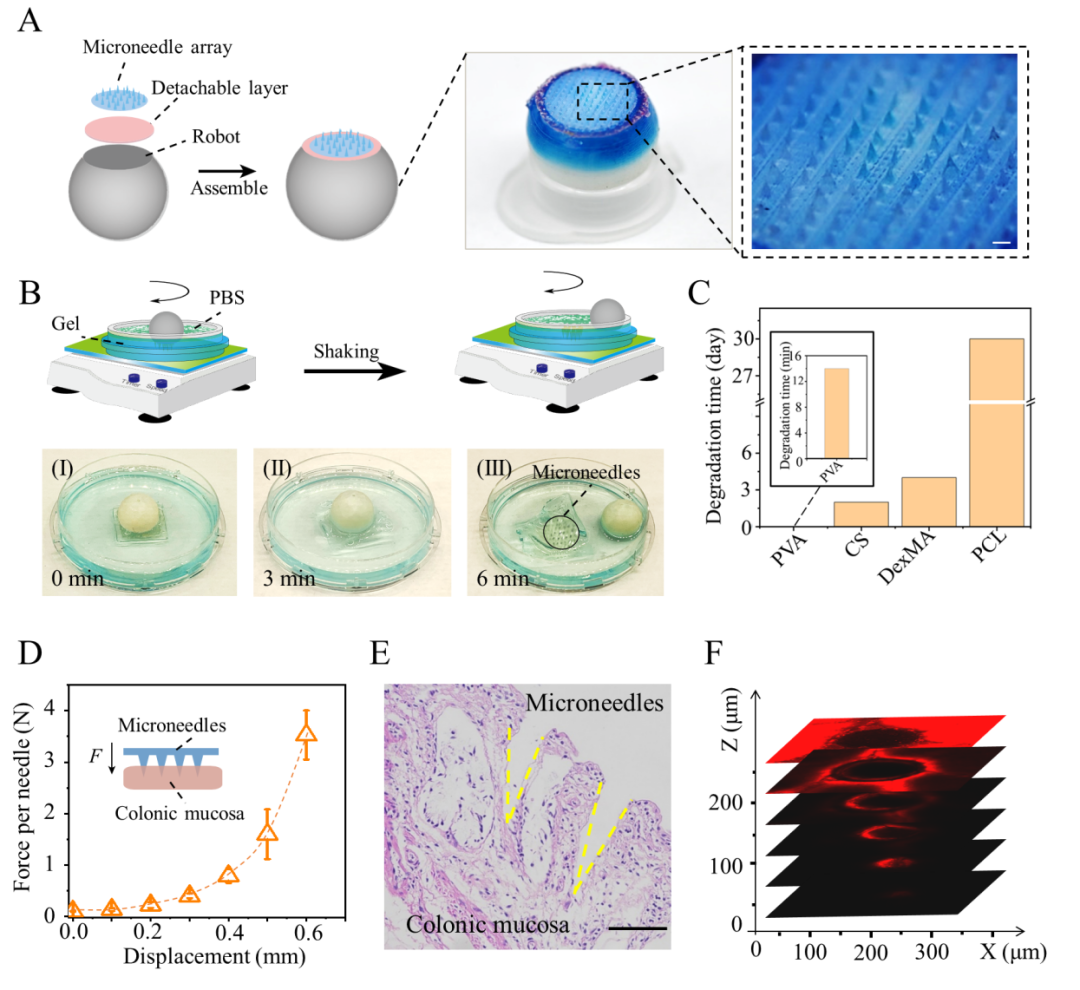
圖4 可拆卸微針機(jī)器人的設(shè)計(jì)與優(yōu)化。(a)可分離的微針機(jī)器人的設(shè)計(jì)和組裝。(b)由可分離層(I-III)的降解引起的微針機(jī)器人的體外分離實(shí)驗(yàn)。(c)PVA、CS、DexMA和PCL微針在PBS緩沖液中的體外累積釋放時(shí)間。(d)對(duì)微針施加的力及其穿透粘膜的深度。(e)微針插入后的體外豬結(jié)腸組織切片圖像(H&E染色法)。(f)Cyanine5.5染色的微針插入結(jié)腸組織的共聚焦顯微圖像。
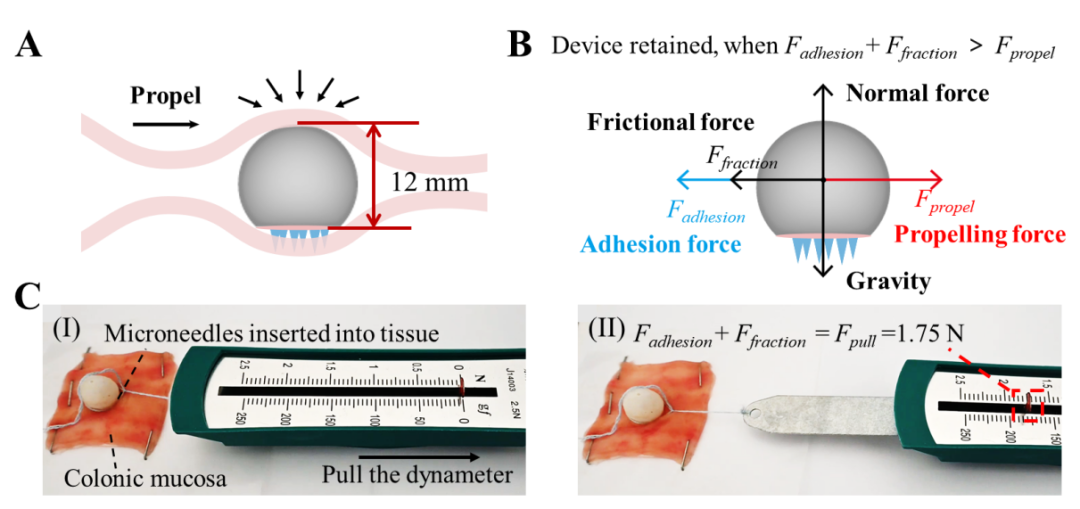
圖5 微針機(jī)器人抵抗結(jié)腸蠕動(dòng)的理論模型。(a)在結(jié)腸蠕動(dòng)下刺入粘膜的微針機(jī)器人的示意圖。(b)結(jié)腸蠕動(dòng)時(shí)腔內(nèi)微針機(jī)器人的受力分析。(c)微針機(jī)器人被牽拉前(I)和牽拉后(II)的拉力示數(shù)。
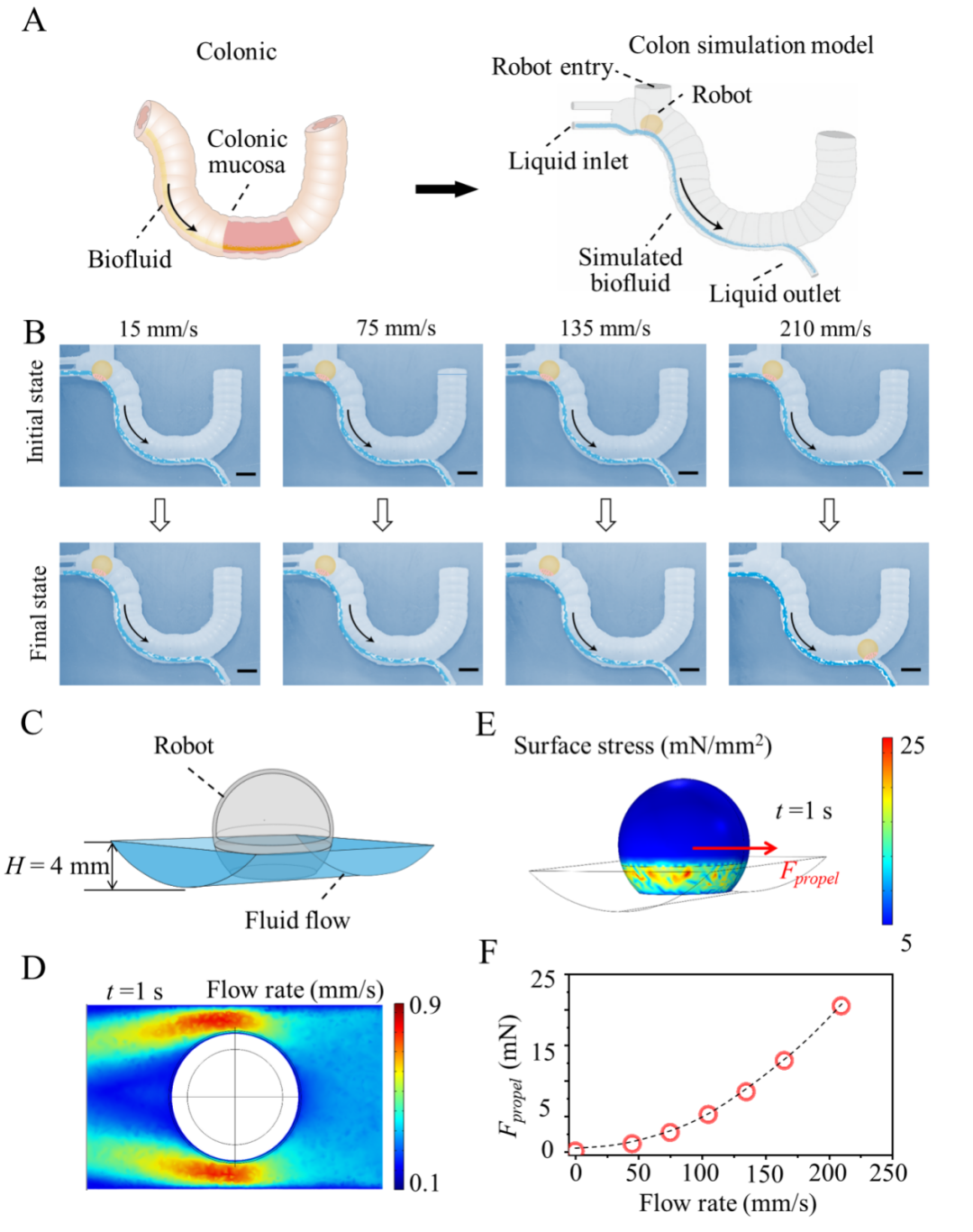
圖6 微針機(jī)器人的體外停留實(shí)驗(yàn)與模擬。(a)模仿人類(lèi)結(jié)腸的軟膠模型。(b)不同流速下機(jī)器人的運(yùn)動(dòng)。(c)構(gòu)建機(jī)器人的有限元流-固模型,流速為210 mm/s時(shí)機(jī)器人周?chē)模╠)流速分布和(e)表面應(yīng)力,以及(f)不同流速對(duì)機(jī)器人的推進(jìn)力。
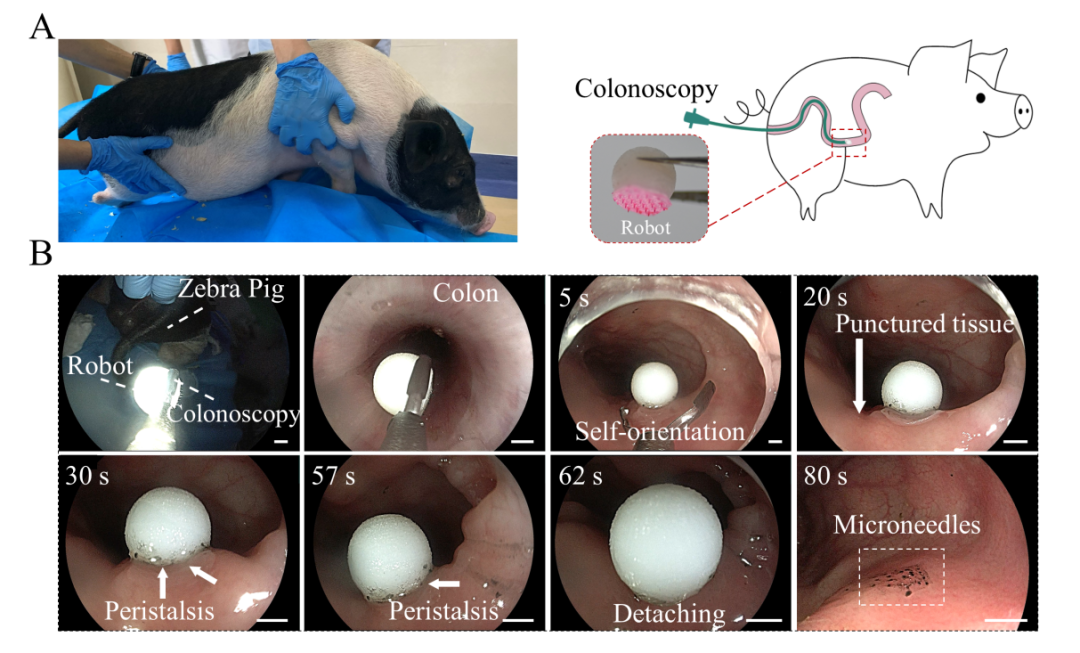
圖7 微針機(jī)器人的斑馬豬體內(nèi)實(shí)驗(yàn)。(a)斑馬豬的照片和微針機(jī)器人進(jìn)入結(jié)腸的輸送示意圖。(b)微針機(jī)器人在斑馬豬結(jié)腸腔內(nèi)的實(shí)驗(yàn)照片。
審核編輯:劉清
-
微型機(jī)器人
+關(guān)注
關(guān)注
0文章
111瀏覽量
19819 -
3D打印技術(shù)
+關(guān)注
關(guān)注
4文章
223瀏覽量
32491 -
振動(dòng)器
+關(guān)注
關(guān)注
1文章
36瀏覽量
6625
原文標(biāo)題:微針機(jī)器人實(shí)現(xiàn)結(jié)腸給藥的快速自定位和抗蠕動(dòng)粘附
文章出處:【微信號(hào):MEMSensor,微信公眾號(hào):MEMS】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
明遠(yuǎn)智睿SSD2351開(kāi)發(fā)板:語(yǔ)音機(jī)器人領(lǐng)域的變革力量
盤(pán)點(diǎn)#機(jī)器人開(kāi)發(fā)平臺(tái)
詳細(xì)介紹機(jī)場(chǎng)智能指路機(jī)器人的工作原理
【「# ROS 2智能機(jī)器人開(kāi)發(fā)實(shí)踐」閱讀體驗(yàn)】視覺(jué)實(shí)現(xiàn)的基礎(chǔ)算法的應(yīng)用
【「# ROS 2智能機(jī)器人開(kāi)發(fā)實(shí)踐」閱讀體驗(yàn)】機(jī)器人入門(mén)的引路書(shū)
大象機(jī)器人攜手進(jìn)迭時(shí)空推出 RISC-V 全棧開(kāi)源六軸機(jī)械臂產(chǎn)品
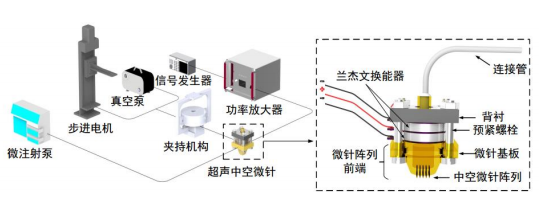
ATA-2041高壓放大器在超聲微針陣列系統(tǒng)模塊中的應(yīng)用
名單公布!【書(shū)籍評(píng)測(cè)活動(dòng)NO.58】ROS 2智能機(jī)器人開(kāi)發(fā)實(shí)踐
【「具身智能機(jī)器人系統(tǒng)」閱讀體驗(yàn)】2.具身智能機(jī)器人的基礎(chǔ)模塊
【「具身智能機(jī)器人系統(tǒng)」閱讀體驗(yàn)】2.具身智能機(jī)器人大模型
【「具身智能機(jī)器人系統(tǒng)」閱讀體驗(yàn)】1.初步理解具身智能
《具身智能機(jī)器人系統(tǒng)》第1-6章閱讀心得之具身智能機(jī)器人系統(tǒng)背景知識(shí)與基礎(chǔ)模塊
基于漩渦湍流輔助的微流控平臺(tái),可實(shí)現(xiàn)類(lèi)精子結(jié)構(gòu)的微型機(jī)器人一步成型

Al大模型機(jī)器人
自動(dòng)停車(chē)機(jī)器人,如何快速構(gòu)建?






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論