") 機械手的直角坐標|多關節(jié)|圓柱坐標|極(球)坐標式運行方式簡述
機械手的直角坐標|多關節(jié)|圓柱坐標|極(球)坐標式運行方式簡述

機械手的手臂運動形式有所不同,一般情況下機械手可以分為:直角坐標式、多關節(jié)式、圓柱坐標式、極(球)坐標式四種形式。
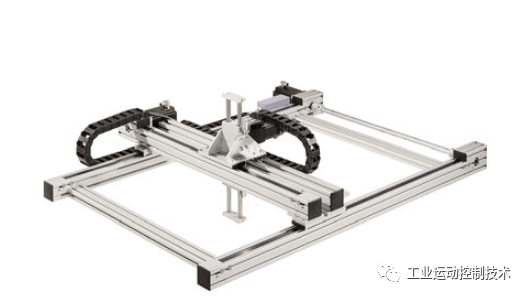
1.直角坐標式就是機械手在直角坐標系的三個坐標軸方向作直線移動,即機械手的前后移動、上下升降、左右移動。直角坐標機器人可達到很高的位置精度(μm級)。針對不同的應用場合,對直角坐標機器人有不同的設計要求,比如根據(jù)對精度、速度的要求選擇不同的傳動方式,根據(jù)特定的工藝要求為末端工作頭選擇不同的夾持設備(夾具、爪手、安裝架等),以及對于示教編程,坐標定位、視覺識別等工作模式的設計選擇等,從而使之能滿足于不同領域、不同工況的應用要求。
2.多關節(jié)式一般就是手臂會分為大臂和小臂兩段,大小臂之間由肘關節(jié)連接,而大臂與立柱之間又連接成肩關節(jié),再加上手腕與小臂之間的腕關節(jié)。但編程和操控必須由供應商通過專業(yè)培訓才能完成,而且特殊軟件需要收費。維護和維修完全受制于人,由于品牌互相不兼容,硬件故障必須由供應商或廠家直接提供,非市場通用產(chǎn)品,費用高昂。

3.圓柱坐標式這種就是機械手作前后伸縮、上下升降和在水平面內(nèi)擺的動作。這種機器人構(gòu)造比較簡單,精度還可以,常用于搬運作業(yè)。其工作空間是一個圓柱狀的空間。

4.極(球)坐標式就是機械手作前后伸縮、上下俯仰和左右擺動的動作。這種機器人結(jié)構(gòu)簡單、成本較低,但精度不很高。主要應用于搬運作業(yè)。其工作空間是一個類球形的空間。

聲明:本文內(nèi)容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場。文章及其配圖僅供工程師學習之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問題,請聯(lián)系本站處理。
舉報投訴
-
機械手
+關注
關注
7文章
345瀏覽量
30403
發(fā)布評論請先 登錄
相關推薦
熱點推薦
三坐標測量機精度保障,盡在蔡司三坐標代測服務套餐
的ZEISSMetrologyCare蔡司三坐標測量機年度服務套餐致力于為您的計量工作保駕護航。ZEISSMetrologyCare蔡司三坐標測量機年度服務套餐是一項專為三坐標測量機用戶

EtherCAT科普系列(7): EtherCAT技術(shù)在工業(yè)機器人控制系統(tǒng)領域的應用
)機器人、并聯(lián)(DELTA)機器人、直角坐標機器人、圓柱坐標機器人以及協(xié)作機器人。廣泛應用于搬運、上下料、焊接與釬焊、裝配與拆卸、潔凈室、涂層、封膠、加工領域等工業(yè)

差示掃描量熱儀曲線的橫坐標和縱坐標各代表什么含義?
差示掃描量熱儀是一種通過測量樣品與參比物在加熱或冷卻過程中的熱量差,來分析物質(zhì)熱特性的儀器。上海和晟HS-DSC-101差示掃描量熱儀一、橫坐標(X軸)含義:通常為溫度(T)或時間(t),具體取決于

CMM三坐標測量機能測量的數(shù)據(jù)
CMM三坐標測量機能夠測量的數(shù)據(jù)非常廣泛,包括但不限于:幾何元素數(shù)據(jù):如點、線、面、圓、球、圓柱、圓錐等幾何元素的尺寸和形狀數(shù)據(jù)。這些數(shù)據(jù)可用于構(gòu)建被測對象的三維模型,進行逆向工程或與設計圖紙進行

汽車制造用三坐標測量機能解決哪些問題
汽車制造用三坐標測量機在汽車生產(chǎn)的多個環(huán)節(jié)發(fā)揮著重要作用,能夠解決以下多方面問題:1、零部件尺寸精度測量-關鍵尺寸檢測:汽車發(fā)動機缸體、缸蓋等零部件的孔徑、缸筒圓柱度、平面度等關鍵尺寸精度要求高。三

三坐標測量機的機器坐標系和原點介紹
建立的,通常采用笛卡爾直角坐標系,由相互垂直的X、Y、Z三個坐標軸組成。(2)特點-唯一性:每臺三坐標測量機都有且僅有一個確定的機器坐標系,其坐標

關于三坐標測量機的常見問題及回答
一、三坐標測量機的基本原理相關問題1.三坐標測量機是如何進行測量的?-三坐標測量機通過探測系統(tǒng)(如接觸式測頭或非接觸式測頭)獲取工件表面上點
三坐標測量機的工作原理 三坐標測量機在質(zhì)量控制中的應用
在現(xiàn)代工業(yè)生產(chǎn)中,產(chǎn)品質(zhì)量的控制至關重要。三坐標測量機作為一種精密測量工具,能夠提供精確的幾何尺寸數(shù)據(jù),對于確保產(chǎn)品質(zhì)量和提高生產(chǎn)效率起著關鍵作用。 一、三坐標測量機的工作原理 三坐標測量機是一種
三坐標測量機應用領域 三坐標測量機與激光測量的區(qū)別
能夠提供精確的測量數(shù)據(jù),用于飛機和航天器部件的檢測。 機械加工行業(yè) 機械加工行業(yè)需要對加工后的零件進行尺寸和形狀的檢測,三坐標測量機能夠提供快速、準確的測量結(jié)果。 模具制造 模具制造過程中,三
三坐標測量機使用技巧 三坐標測量機精度影響因素
三坐標測量機的使用技巧及精度影響因素是確保測量結(jié)果準確性和可靠性的關鍵。 三坐標測量機的使用技巧 開機預熱 : 在使用三坐標測量機之前,需要先開機預熱,預熱時間一般為30分鐘左右,以確保機器達到穩(wěn)定
直角坐標機器人在精密制造中可以執(zhí)行哪些任務?
直角坐標機器人基于X、Y、Z軸精確控制,用于物料搬運、裝配、焊接、噴漆、檢測、包裝等制造業(yè)任務,以其結(jié)構(gòu)簡單、高承載和精確控制成為自動化工具,飛創(chuàng)提供高速高精度直線電機模組解決方案。

機械手 OEM 的應用
工具,幫助學生更好地理解和掌握機械原理、自動化技術(shù)等知識。學生可以通過編程和操作機械手,提高自己的動手能力和創(chuàng)新思維能力。
機械手 OEM 的產(chǎn)品介紹 :
按結(jié)構(gòu)類型劃分 :
直角坐標
發(fā)表于 09-18 10:31
pcb設計中如何設置坐標原點
在PCB設計中,坐標原點是一個非常重要的概念,它決定了PCB布局的起始位置和方向。 一、坐標原點的定義 坐標原點的概念 在PCB設計中,坐標原點是一個參考點,用于確定PCB布局的起始位
蔡司三坐標SPECTRUM與CAPTUM三坐標介紹
蔡司,光學與測量領域的璀璨星辰,其旗下的三坐標SPECTRUM與CAPTUM三坐標測量機(CMM)系列,如同雙子星般熠熠生輝,各自在測量技術(shù)的舞臺上展現(xiàn)出獨特的風采。蔡司代理昆山友碩的工程師們,為





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論