 第四章 獨立按鍵與LED
第四章 獨立按鍵與LED
第一節 硬件解讀
既然大家都學到物聯網了,想必這些基礎一定很熟悉,關于按鍵的消抖等基本知識就不再重復,直接看原理圖。LED的原理圖,上一章也已經講解了,本章將重點是獨立按鍵。以下是獨立按鍵的原理圖:
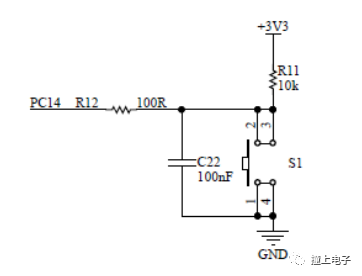
從上圖可以看出,該按鍵連接的引腳是PC14,只要按鍵被按下,PC14變為低電平,反過來也是,只要該引腳為低電平,即可證明該按鍵被按下。
第二節 配置環境
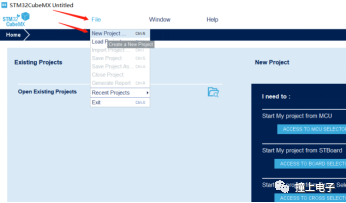
1,打開stm32cubeMX。
2,選擇“File-New project ...”。
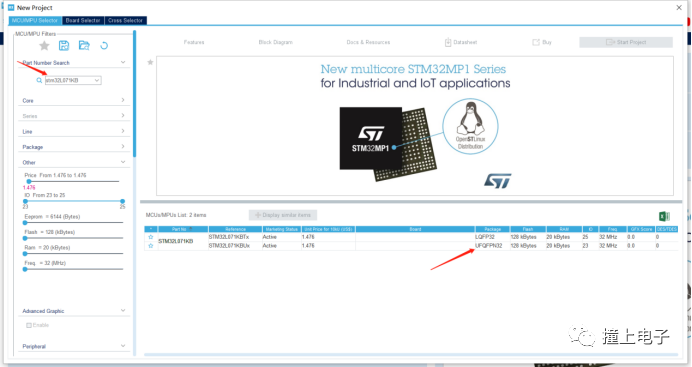
3,搜索芯片,芯片型號為:STM32L071KB(大小寫都可以)。并選擇芯片封裝為UFQFPN32的芯片。
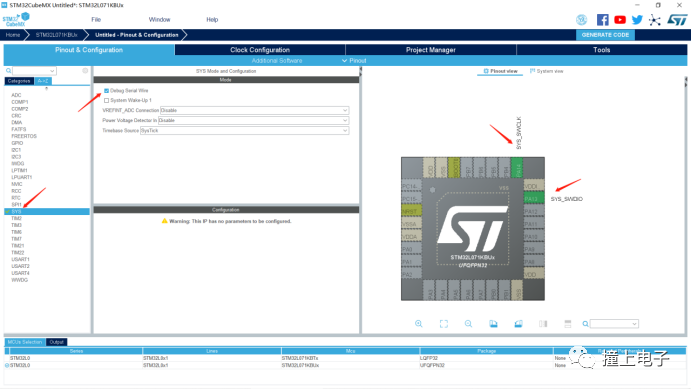
4,選擇A->Z,這里可以看見該芯片的所有的功能。

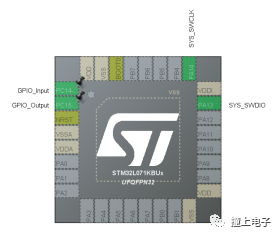
5,選中“SYS”,勾選“Debug Serial Wire”,可以看見PA13與PA14引腳變成綠色,分別用作SYS_SWDIO和SYS_SWCLK。
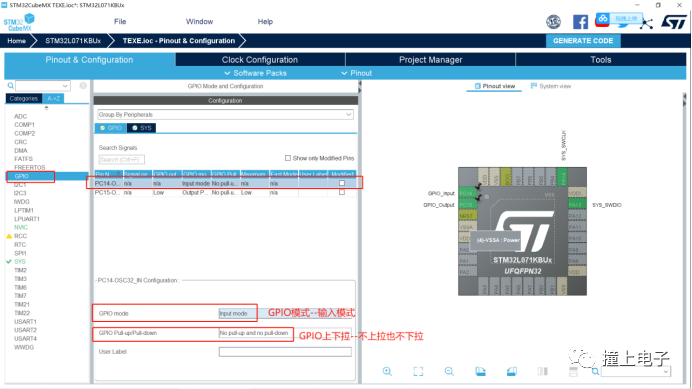
6,將PC14和PC15用作輸入和輸出。如下圖配置:
7,上一章詳細解釋了GPIO的輸出模式(LED為例)的初始化信息,下面來看看GPIO的輸入的配置(以為按鍵輸入為例)。
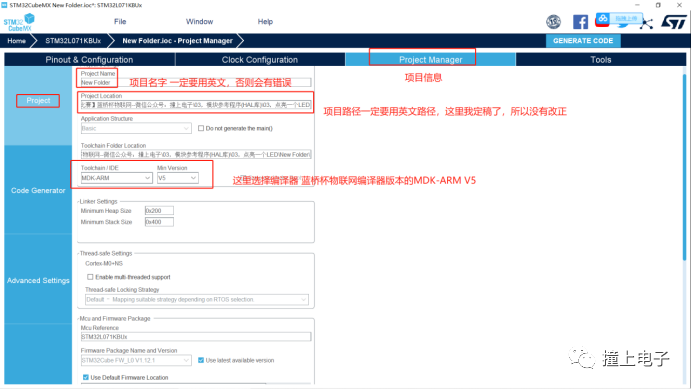
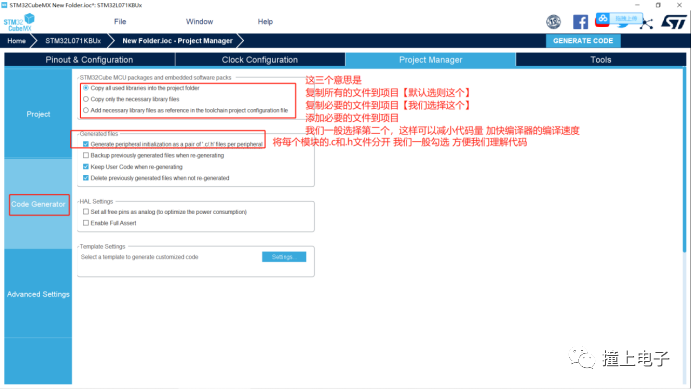
8,選中“Project Manager-Project”。在Project Name中填寫項目的名字(盡可能不要用中文),在Project Location中選擇項目保存的路徑(盡可能不要用中文),在Toolchain/IDE中選擇編譯器,藍橋杯物聯網比賽用的是MDK5,所以我們選擇MDK-ARM V5。對于項目信息的操作,大家注意看下面2張圖。
9,點擊GENERATE CODE,生成代碼。
10,點擊“close”,代碼生成成功。
第三節 編寫代碼
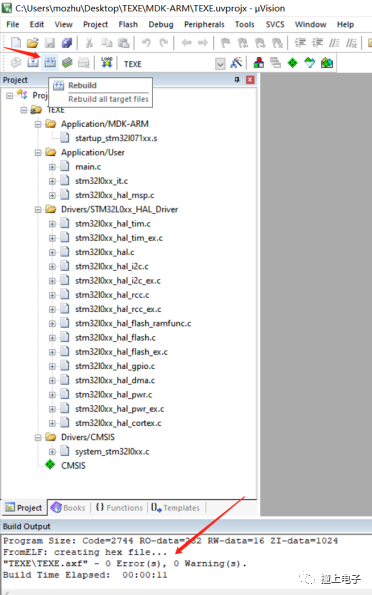
1,根據stm32cubeMX生成代碼的目錄,打開MDK5。
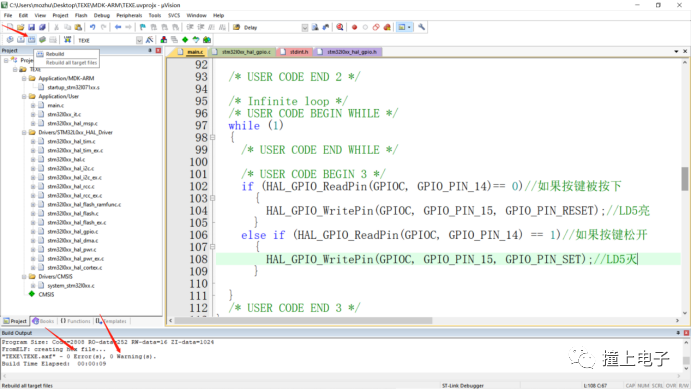
2,點擊”Rebuild”,開始編譯代碼,檢查stm32cubeMX生成的代碼是否有問題。如下圖,0錯誤,0警告。
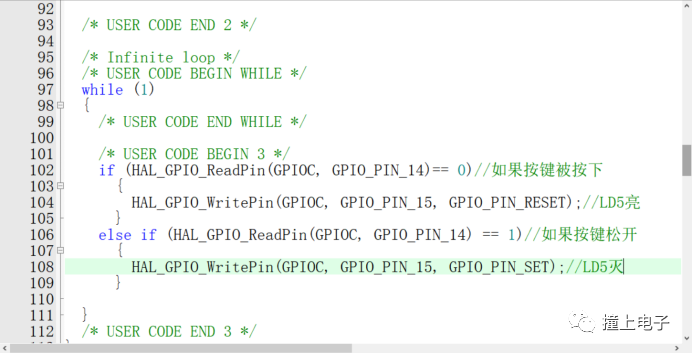
3,在while中添加以下語句,注意,需要在BEGIN與END之間添加。
4,點擊”Rebuild”,開始編譯代碼,檢查stm32cubeMX生成的代碼是否有問題。如下圖,0錯誤,0警告。
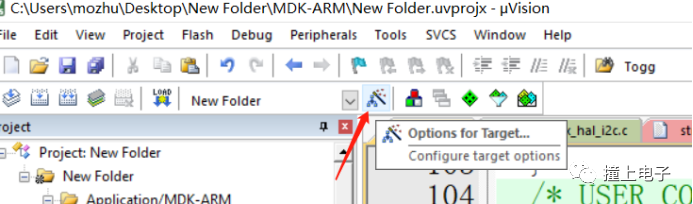
5,點擊”Options for Target...“。
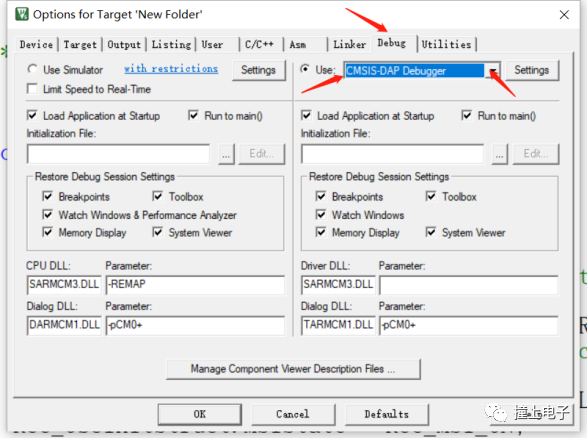
6,點擊”Debuy“,然后選擇下載器”CMSIS-DAP Debugger“,并點擊”OK“。
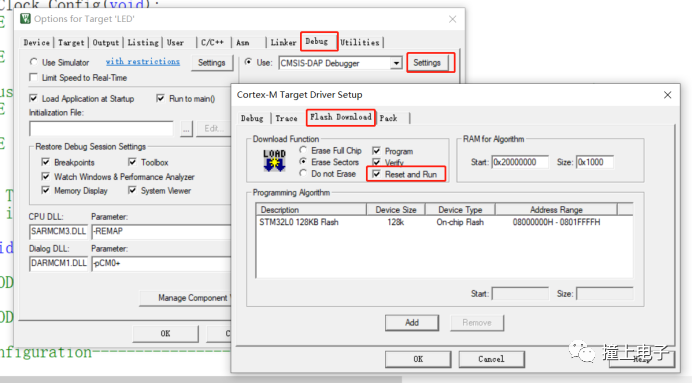
7,選擇“Debug”--“Settings”--“Flash Download”--“Reset and Run”。這樣開發板每次上電都自己先復位一次,再跑程序。
8,點擊”Download“,開始下載程序并下載成功。
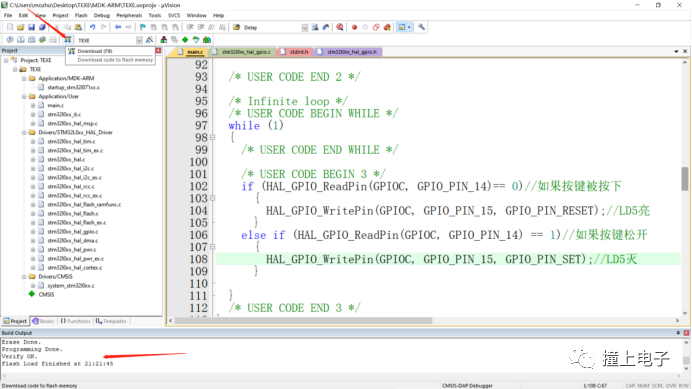
第四節 實驗現象
實驗注意事項:
1,程序語句需要位于程序的BEGIN與END之間。
3,CN4所有撥碼開關必須選擇ON DP檔,否則無法下載程序。
實驗現象:
LD1,LD4常亮。按下按鍵,LD5亮;松開按鍵,LD5滅。
宗旨:
免費的服務,永遠的開源
說明:
1.本教程免費,開源,禁止用于任何商業用途,違者必究。
2.本教程版權所屬為東莞市東城墨竹公子電子工作室,盜版必究。
-
led
+關注
關注
242文章
23770瀏覽量
671862
發布評論請先 登錄
【「# 運算放大器參數解析與LTspice應用仿真」閱讀體驗】+全書概覽與第一章閱讀分享
第四章 什么是寄存器
【第四章 定時任務】手把手教你玩轉新版正點原子云
華為-射頻基礎知識培訓
和 Dr Peter 一起學 KiCad 4.1~4.2:啟動PCB 編輯器,導入封裝
《DNESP32S3使用指南-IDF版_V1.6》第四章 認識ESP-IDF
《DNK210使用指南 -CanMV版 V1.0》第十四章 按鍵輸入實驗
【「嵌入式Hypervisor:架構、原理與應用」閱讀體驗】+第三四章閱讀報告
【北京迅為】iTOP-i.MX6開發板使用手冊第四部分固件編譯第十四章非設備樹Android4.4系統編譯
第四章:對廣東龍芯2K0300-蜂鳥板-v1.0視頻教程我的感觸
【「ARM MCU嵌入式開發 | 基于國產GD32F10x芯片」閱讀體驗】+書籍整體概況
第四章:在 PC 交叉編譯 aarch64 的 tensorflow 開發環境并測試
第四章-V1.5 舵機 舵機角度控制 PWM控制紅外對管和按鍵控制 STM32驅動舵機控制 SG90控制






 工商網監
工商網監
評論