 感知硬件,自動駕駛汽車“看”路奧秘
感知硬件,自動駕駛汽車“看”路奧秘
隨著人工智能技術的發展與高級輔助駕駛系統的普及,自動駕駛汽車雛形已經初現,自動駕駛汽車得以實現離不開感知系統、決策系統和控制系統,三大系統讓自動駕駛汽車“看”得清、“想”得快、“走”得穩。感知系統作為監測道路環境,讓自動駕駛汽車“看”得清的主要系統,是決定自動駕駛汽車可以實現的第一步。為了讓自動駕駛汽車感知更加精準,離不開車載攝像頭、毫米波雷達、超聲波雷達、激光雷達等感知硬件,其中,超聲波雷達、毫米波雷達和激光雷達主要用于測量距離、速度和障礙物,車載攝像頭主要用于圖像采集和識別,感知硬件各司其職,讓自動駕駛汽車可以獲取更多的道路信息。
車載攝像頭
1.1技術原理
車載攝像頭是利用攝像機成像原理,通過采集道路的高質量圖像信息,對道路上的交通標識、其他車輛、行人等信息進行獲取。車載攝像頭可以通過單目或立體成像的方式進行感知,其中單目攝像頭是通過單一攝像頭獲取二維圖像,而立體攝像頭則需要兩個或多個攝像頭組合獲取三維圖像。目前車上搭載的車載攝像頭根據安裝位置主要分為車載攝像頭主要分為前視攝像頭、環視攝像頭、后視攝像頭、側視攝像頭以及內置攝像頭五種類別。車載攝像頭的主要硬件包括光學鏡頭(其中包含光學鏡頭、濾光片、保護膜等)、圖像傳感器、圖像信號處理器ISP、串行器、連接器等部件。
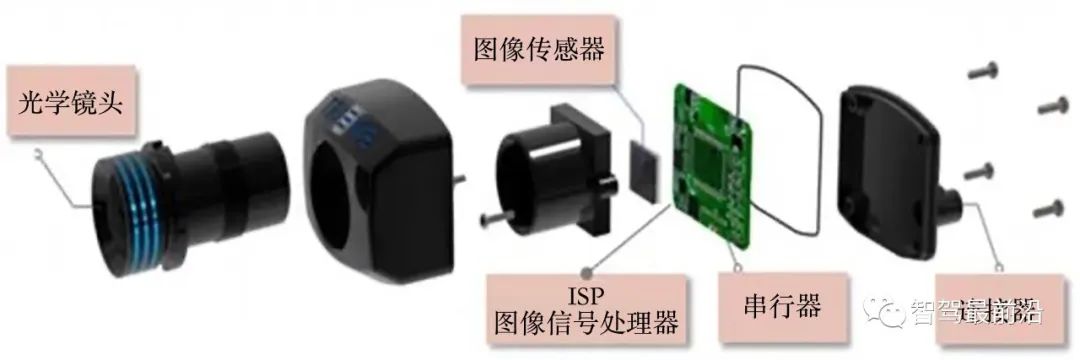
車載攝像頭的組成
光學鏡頭:光學鏡頭主要負責聚焦光線,將視野中的物體投射到成像介質表面,根據成像效果的要求不同,可能要求多層光學鏡片。濾光片可以將人眼看不到的光波段進行濾除,只留下人眼視野范圍內的實際景物的可見光波段。圖像傳感器:圖像傳感器可以利用光電器件的光電轉換功能將感光面上的光像轉換為與光像成相應比例關系的電信號。主要分為CCD和CMOS兩種。圖像信號處理器ISP:主要使用硬件結構完成圖像圖傳感器輸入的圖像視頻源RAW格式數據的前處理,可轉換為YCbCr等格式。還可以完成圖像縮放、自動曝光、自動白平衡、自動聚焦等多種工作。串行器:將處理后的圖像數據進行傳輸,可用于傳輸RGB、YUV等多種圖像數據種類。連接器:用于連接固定攝像頭。
1.2車載攝像頭優勢
車載攝像頭作為自動駕駛汽車主要感知硬件,在自動駕駛汽車中承擔著非常重要的任務,由于其成本較低、易于安裝和維護,可以識別高清的交通信息,對交通標識和其他車輛有很好的識別效果。因此被眾多主機廠所推崇,以特斯拉為主的企業,更是將車載攝像頭作為主要的感知硬件,通過算法的輔助,讓自動駕駛汽車可以直接實現自動駕駛。
1.3車載攝像頭劣勢
由于車載攝像頭拍攝的主要是圖像信息,為了讓自動駕駛汽車可以更好地自主完成行駛,就需要通過大量的計算來完成圖像處理。在惡劣天氣、弱光、反光等情況下,車載攝像頭的拍攝效果也會受到影響,此外由于車載攝像頭視野范圍相對較窄,需要多個攝像頭的配合才能交通信息的獲取,從而確保自動駕駛的行車安全。
激光雷達
2.1技術原理
激光雷達也稱光學雷達,是激光探測和測距系統的簡稱,通過發射和接收激光束,檢測周圍物體的距離和位置,從而實現對自動駕駛汽車周邊環境的感知。激光雷達主要由激光發射器、接收器、掃描器、透鏡天線和信號處理電路等部分組成,按照工作介質分,激光雷達可以被分為固體激光雷達、氣體激光雷達與半導體激光雷達等;按照線數分,激光雷達可以被分為單線激光雷達與多線激光雷達;按照掃描方式分,激光雷達可以被分為MEMS型激光雷達、Flash型激光雷達、相控陣激光雷達與機械旋轉式激光雷達等;按照探測方式分,激光雷達可以被分為直接探測激光雷達、相干探測激光雷達;按激光發射波形分,激光雷達可以被分為連續型激光雷達與脈沖型激光雷達。
2.2激光雷達優勢
以谷歌為主的主機廠在研究自動駕駛技術時,都采用了激光雷達作為主要感知硬件的解決方案。激光雷達具有測量精度高、響應速度快、抗干擾能力強等優點,可以提供高精度目標位置和輪廓信息,對目標分類和識別等任務具有很好的效果。激光雷達還可以提供高分辨率的地圖,使車輛可以實現高精度的定位和路徑規劃,此外激光雷達具有較大的視野范圍,可以檢測多個角度的目標。在復雜的環境下,激光雷達也可以提供更為精準的目標位置信息,使自動駕駛汽車可以避免碰撞,除此之外,激光雷達還可以在可見光無法穿透的情況下繼續工作,使自動駕駛汽車獲取信息更為精準。
2.3激光雷達劣勢
激光雷達相較于車載攝像頭,其成本相對較高,且制造和維護成本也相對較大,這也是現目前激光雷達受限的主要原因之一。在大雨、濃煙、濃霧等惡劣天氣時,激光雷達的探測精度會急速下降。由于激光雷達是通過激光束的發射和接收時間差來判斷自動駕駛周邊環境的,因此無法識別物體顏色、種類、文字等信息。
毫米波雷達
3.1技術原理
毫米波雷達是一種利用毫米波進行測距和成像的雷達,工作頻段一般為30 GHz~300 GHz,波長一般為1 mm~10 mm,介于微波和厘米波之間。毫米波雷達發射高頻電磁波,通過接收波的反射來檢測周圍物體的距離和位置,從而實現對道路上物體的感知。毫米波雷達一般由雷達圓頂、分立的雷達機身、天線PCB板、處理器、MMIC和電源管理、壓鑄底板等組成。毫米波雷達的感知原理與激光雷達類似,但毫米波雷達可以克服激光雷達在弱光或光滑表面等環境下的缺點。

傳統毫米波雷達組成
3.2毫米波雷達優勢
毫米波雷達相對技術比較成熟,在高級輔助駕駛功能上使用比較普及,是感知環節中重要的一環,毫米波雷達可以在遠距離和低能見度條件下精確地探測物體,能夠探測到很小的目標,如行人、自行車等,具有較高的精度和穩定性;與激光雷達和車載攝像頭不同,毫米波雷達不受光照和天氣條件的限制,可以在雨雪、霧等低能見度條件下工作;此外毫米波雷達具有體積小,易集成和空間分辨率高的特點,毫米波雷達可以全天候工作,在極端天氣及夜晚也可以發揮作用,毫米波雷達測距也比較遠。
3.3毫米波雷達劣勢
毫米波雷達由于分辨率較低,難以成像且無法識別圖像,不能提供詳細的空間信息,因此并不能作為激光雷達的替代品,且由于毫米波雷達是利用電磁波進行探測,如果周邊有較強的電磁干擾,則可能會影響毫米波雷達的探測效果。
3.4毫米波雷達未來
由于傳統毫米波雷達只能探測二維水平坐標,并沒有高度信息,因此在自動駕駛汽車感知硬件的使用上,毫米波雷達并不具備優勢,為此在自動駕駛技術的發展過程中,4D毫米波雷達的概念便被提了出來,4D毫米波雷達又稱為成像雷達,在原有的距離、速度、方向的數據基礎上,加上了對目標的高度分析,將第4個維度整合到傳統毫米波雷達中,以更好地了解和繪制環境地圖,讓測到的交通數據更為精準。目前4D毫米波雷達主要有兩種技術方案,一種是4D毫米波雷達企業自主研發多通道陣列射頻芯片組、雷達處理器芯片和基于人工智能的后處理軟件算法。另一種就是基于傳統雷達芯片供應商的解決方案,通過多芯片極聯,或者軟件算法來實現密集點云輸出及識別。4D毫米波雷達的主要特點就是角分辨率非常高,前置4D毫米波雷達角分辨率可達1度方位角和2度俯仰角,當加裝4D毫米波雷達的自動駕駛汽車在探測道路信息時,可以直接探測到車輛周邊物體的輪廓。像是在道路信息比較豐富,如行人與車輛夾雜在一起時,4D毫米波雷達就可以直接對行人和車輛進行識別,并可以判斷對應物體的運動情況(是否運動、運動方向)。4D毫米波雷達還可以探測到幾何形狀,比如在隧道場景中時,可以探測到隧道的長度和寬度。4D毫米波雷達的出現,可以提高自動駕駛汽車對道路信息的探測精度,獲取更多的信息以供自動駕駛汽車做出行駛預判。4D毫米波雷達就像是給“近視”的自動駕駛汽車配置了近視眼鏡,讓自動駕駛汽車“看”的更清晰。
超聲波雷達
4.1技術原理
超聲波雷達是一款極其常見的傳感器,在現在的汽車上使用非常普遍,超聲波雷達主要通過超聲波發射裝置向外發出超聲波,通過計算接收器接收到發射出去超聲波的時間差來測算距離。目前,常用探頭的工作頻率有40 kHz,48 kHz和58 kHz三種。一般來說,頻率越高,靈敏度越高,但水平與垂直方向的探測角度就越小,因此在車輛的使用上,一般采用40 kHz的探頭。
4.2超聲波雷達優勢
超聲波雷達具有防水、防塵等優勢,即使有少量的泥沙遮擋也不影響。探測范圍在0.1 m~3 m之間,而且精度較高,可以提供精準的位置信息,因此非常適用于泊車輔助,此外超聲波雷達易于安裝和維護,因此在汽車上得到了普遍使用。
4.3超聲波雷達劣勢
由于超聲波雷達視野范圍較小,因此需要多個超聲波雷達列陣組合,才可以實現更精準的識別,這就會占用更多的車載空間;在高速下,超聲波雷達也具有一定的局限定;此外在有噪音干擾的情況下,超聲波雷達也無法得到使用。
感知硬件的未來趨勢
感知硬件作為讓自動駕駛汽車“看”清道路必不可少的關鍵技術,隨著自動駕駛汽車的普及和應用,其重要性將愈發凸顯,其技術也將不斷完善,其發展也將更加多元化和集成化。為了讓自動駕駛汽車獲得的數據更加精準,需要將多個感知硬件獲取的數據進行融合,從而讓自動駕駛汽車朝著更加可靠和安全的方向發展。此外,隨著人工智能技術的不斷完善,自動駕駛感知硬件也將在人工智能的技術下,進一步提高感知的精度和魯棒性,實現多層次檢測和安全決策。隨著技術的不斷提升,感知硬件的成本也將降低,從而讓自動駕駛汽車成為大眾買得起的消費產品。總之,自動駕駛感知硬件是自動駕駛汽車的重要組成部分,其發展和完善將對自動駕駛技術的推廣和應用起到至關重要的作用。未來的自動駕駛汽車感知系統將不斷進化和升級,為駕駛員和乘客帶來更安全、更便捷、更舒適的出行體驗。
審核編輯黃宇
-
雷達
+關注
關注
50文章
3075瀏覽量
119395 -
人工智能
+關注
關注
1804文章
48691瀏覽量
246429 -
自動駕駛
+關注
關注
788文章
14194瀏覽量
169503 -
汽車
+關注
關注
14文章
3794瀏覽量
39211
發布評論請先 登錄
自動駕駛安全基石:ODD
新能源車軟件單元測試深度解析:自動駕駛系統視角

感知融合如何讓自動駕駛汽車“看”世界更清晰?

NVIDIA Halos自動駕駛汽車安全系統發布
理想汽車推出全新自動駕駛架構
標貝科技:自動駕駛中的數據標注類別分享

標貝科技:自動駕駛中的數據標注類別分享







 工商網監
工商網監
評論